

異常歩行は誰の問題?その3
前回は人の運動システムの作動の特徴の一つ、「状況性」からぶん回し歩行を考察してみた。片麻痺患者さんは半身に弛緩性麻痺が生じるという状況変化に対応して、歩くためにぶん回し歩行という新しい歩行スキルを生み出して歩行の機能を獲得・維持しているので、状況性という作動の特徴は失っておられない、と説明した。
今回はもう一つの運動システムの作動の特徴である「自律性」について説明したい。
人の運動システムには、その人にとって必要な運動課題を自律的に達成しようとする作動がある。「自律的課題達成」という作動である。
たとえばお腹が空くと自然に食べ物を探したりする。町中を歩いている時、お腹が空いていない時は興味のあるものに自然に注意が向くが、一旦お腹が空いてくると自然に食事処の看板に注意が向く。また何か正体不明の危険が迫っていると感じたときには、体が自然に逃げる体勢をとるし、どんな危険かに興味があると逆に留まってその正体を探索しようとする。
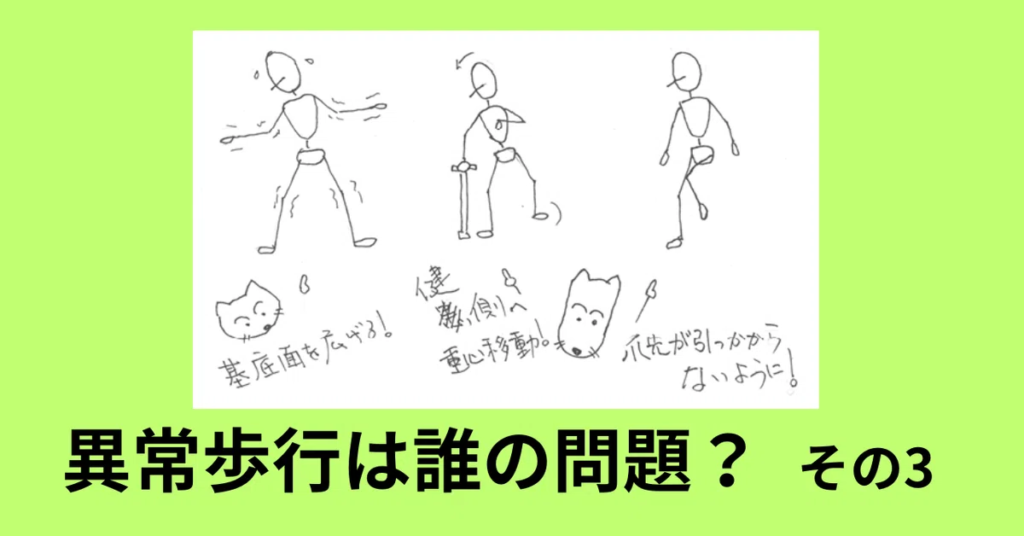
一方、腓骨神経麻痺になると下垂足になり普通に歩こうとするとつま先が床に引っかかって危険なので自然に膝を高く挙げてつま先が床に触れないように鶏歩という歩行スキルを生み出して問題解決を図る。腰痛ヘルニアになると、動くと疼痛が生じるので脊柱は逃避性の側彎が生じ、体幹の筋肉を収縮して固めてできるだけ痛みが出ないように一体になって動く。失調症では、重力と床の間で上手く体をコントロールできないという問題(基礎定位障害)が生じてバランスを崩しやすくなるので、スタンスを広くとって基底面を広げて倒れにくくするという問題解決を図る。
いずれも本人の意識とは関係なく、運動システムが課題達成のために自律的に問題解決の作動を起こす。これを「自律的問題解決」と呼ぶ。そして「自律的課題達成の作動」と「自律的問題解決の作動」の二つの作動を合わせて「自律性」と呼ぶ。
だから片麻痺患者さんでも弛緩性麻痺で患側下肢が振り出せないので、健側の上下肢体幹を中心にぶん回し歩行という歩行スキルを自律的に生み出して問題を解決して歩行という課題を達成しようとするわけだ。
従って脳卒中片麻痺患者さんでは「状況性」と「自律性」という両方の作動の特徴が失われていないことが分かる。
こうしてCAMRの視点から見ると、患者さんは生まれながらの「運動問題解決者」であり「運動課題達成者」なのである。
私たちはセラピストの立場から患者さんの歩行を「異常歩行」だとか「正常歩行」などと評価しているが、患者さんにとってはどうでもよいこと、余計なお世話でもある。特に「異常」などという言葉は害ばかりあって一利もない。患者さんは異常歩行という悪い歩行を生み出しているのではなく、「状況変化に応じて課題達成のための新たな歩行スキル」を努力して生み出しておられるだけである。
またセラピストの教育においても害がある。異常歩行といわれると、セラピストは「悪い歩行の形だから矯正しないといけない」と単純に思い込んでしまう。実は僕も若い頃そう思っていた。そうして、生み出された歩行スキルの意味や価値などは考えずに、ひたすら「矯正しよう、治そう」と努力しては失敗してしまう。挙げ句の果てに自分がまだ未熟だからと自分を責めたり、患者さんにやる気がないなどと患者さんのせいにしたりしているのをたくさん見てきた。
麻痺のある体でなんとか適応的に歩くために、患者さんが生み出したのがぶん回しの歩行スキルである。できれば学校教育の中から「異常歩行(運動)」という間違った、悪いイメージを伴う用語は使わないようにした方が良いと思っている。
次回はこのシリーズのまとめです。(その4に続く)


カテゴリ:異常歩行は誰の問題? [コメント:0]












コメントフォーム