スポーツから学ぶ運動システム(その5)
ベルンシュタインがもう一つ提案しているのは、「課題達成時の知覚情報の予期的利用」である。ここでは射撃あるいはアーチェリーを例に説明してみよう。 選手は環境の状態を全身で感じながら、的に向かって銃をズドンと撃つ、あるいは弓で矢をビシュッと放つ。弾や矢は空中を、重力や温度、湿度、風などの影響を受けながら的に向かい当たったり外れたりする。
選手はその結果を全身の知覚によって知り、修正を加えるわけだ。たとえばその時、その場の環境の状態を全身の知覚を用いて感じる。着弾点が思ったより低かったり、右にずれたりすると環境の中から拾い出した「湿気が高いな。今は空気抵抗が思ったより大きい」とか「今の右向きの風の影響でこの程度のズレが出た」などと考え、修正を予期的に行い、次を放つ。そしてまたその結果をフィードバックしては、次に予期的修正を加える。・・・これが「課題達成時の知覚情報の予期的利用」と言うことである。
たとえば前に出た職人の腕の動きは一回一回微妙にずれるけれど、釘とハンマーの接触を視覚や全身の筋感覚によって毎回予期的に修正しながら課題達成しているから、異なった運動で同じ結果を生み出すことができるとしているわけだ。初心者の間は、失敗が多いが、その結果はフィードバックされ、全身の知覚情報と照らし合わせて予期的な修正の仕方を学んでいくのである。結果が上手く行けば「その調子で」繰り返すことになる。
つまり協応構造で運動を毎回作りだし、ある程度安定して似た運動を繰り返せるようになる。繰り返し練習はこのために必要である。しかしその中でも微妙にずれてしまう毎回の運動の軌道をその課題達成時の知覚情報を予期的に用いることで毎回課題達成をやり遂げているのである。そしてこのためにも莫大な時間が必要となるわけだ。間違いをどのように修正するか、回りの環境や状況の影響を受けながら、予期的に修正するためには莫大で異なった状況を繰り返す経験が必要である。
生態心理学のギブソンは、骨格とそれをつなぐ軟部組織や筋群、視覚、聴覚、嗅覚、味覚などが一体になって構成される人の身体をボーンスペースと呼んでいる。彼の言う触覚系(筋の固有覚を含む)は、全身常に一体となって対象物を動きながら知覚し、同時に自分の体の状態も知覚しているとしている。
つまり学校で習ったように知覚とはそれぞれ視覚、聴覚、嗅覚などと独立したモデュールとして働いているのではなく、全ての知覚は同時に働いて課題達成に関わっているとしている。
ジャグラーは初期には視覚を中心にコントロールを学ぶが、熟練してくると閉眼しても失敗なくできるようになる。視覚情報だけでなく、全身の緊張状態や体の安定、腕の動き、皮膚の感覚などの知覚情報を総動員してジャグリングができるようになるからだ。バスケやサッカーのノールックパスなどもそれと似た例だろう。
知覚学習とは、単独の感覚モデュールではなく、ボーンスペースによって全身的・全ての感覚間で行われるのである。(その6に続く)
#運動システム#ベルンシュタイン#協応構造#知覚情報の予期的利用
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!



スポーツから学ぶ運動システム(その4)
従来、運動学習は人の運動システムを機械にたとえて説明されてきた。機械のように頭の中にプログラムがあり、同じ動きを繰り返し生み出していると考えられてきた。運動学習は、頭の中にプログラムを作るために同じ運動を繰り返すのである。その結果、一つのプログラムによって同じ運動が生まれ、同じ結果が生み出されると考えられた。
しかしこれは間違っているのではないか。人の運動システムは機械とはまったく異なる作動原理で動いているのではないか。まあこれがベルンシュタインの出した結論である。人の運動システムは機械とは丸っきり異なった性質を持っているし、頭の中にあるプログラムで同じ運動を生み出しているわけでもないだろう。(実際スキーマ説のように修正されたプログラム説も後に出てきた。このスキーマ説に影響を与えたのもベルンシュタインと言われている)
ではどのようにして人の運動システムは毎回異なった動きで同じ結果を生み出しているのだろうか?この説明のためにベルンシュタインは2つのアイデアを提案している。
1つは協応構造だ。筋・骨格的なレベルあるいは神経的ないくつかのレベルで、動きを制限するような協応的な構造が作られるのだ。構造的に動きはグループとして限定されるので一つ一つの細かな筋をコントロールする必要がなくなる。
たとえばスポーツでみると、初心者は体幹や四肢の動きがバラバラで協調性が見られないのに対して、上級者はその人らしい体の構え、フォームを持っている。プロ野球の打者やプロバスケットポールの選手は、自分らしく安定したフォームができるまで数え切れないほどの練習を繰り返す。
ピッチャーの投げたボールは様々な速度、コース、球種で打席に届くが、そのボールがある範囲内におさまっていれば打者はその人らしいフォームでバットスィングをするものだ。それは繰り返しの結果のフィードバックによって課題を達成するために便利なベースとして作られた協応構造があるからだ。
繰り返しの練習は、頭の中に固定的なプログラムを作るためではなく、より良い結果を生み出すための構え、ベースとしての協応構造を生み出すための過程である。職人やアスリートの一人一人はたくさんの試行錯誤の中から、自分に合った課題達成のための協応構造を発見し、作り上げるために繰り返し練習を必要とするのだ。
そして一旦できてしまった協応構造も、しばらくその課題をしなかったり、身体的・状況的な変化(体型や筋力変化、環境変化など)が生まれると良い結果は生まれにくくなる。だからイチローのように一流選手になってからも、その時、その状況に相応しいように協応構造を修正するために基礎となる素振り練習をやめないのである。やめるとその協応構造を基にした課題達成方法と実際の状況変化の間にズレが生じて良い結果を生み出せなくなるからだ。
そして実際の状況変化に応じるために必要なのが、ベルンシュタインが提案したもう一つのアイデア、「課題達成時の知覚情報の予期的利用」のスキルである。(その5に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
スポーツから学ぶ運動システム(その3)
前回は人の運動システムが同じ運動を繰り返せない理由の1つとして人の運動システムの粘弾性の性質を挙げた。
ベルンシュタインは他に自由度と多義性の問題を挙げている。
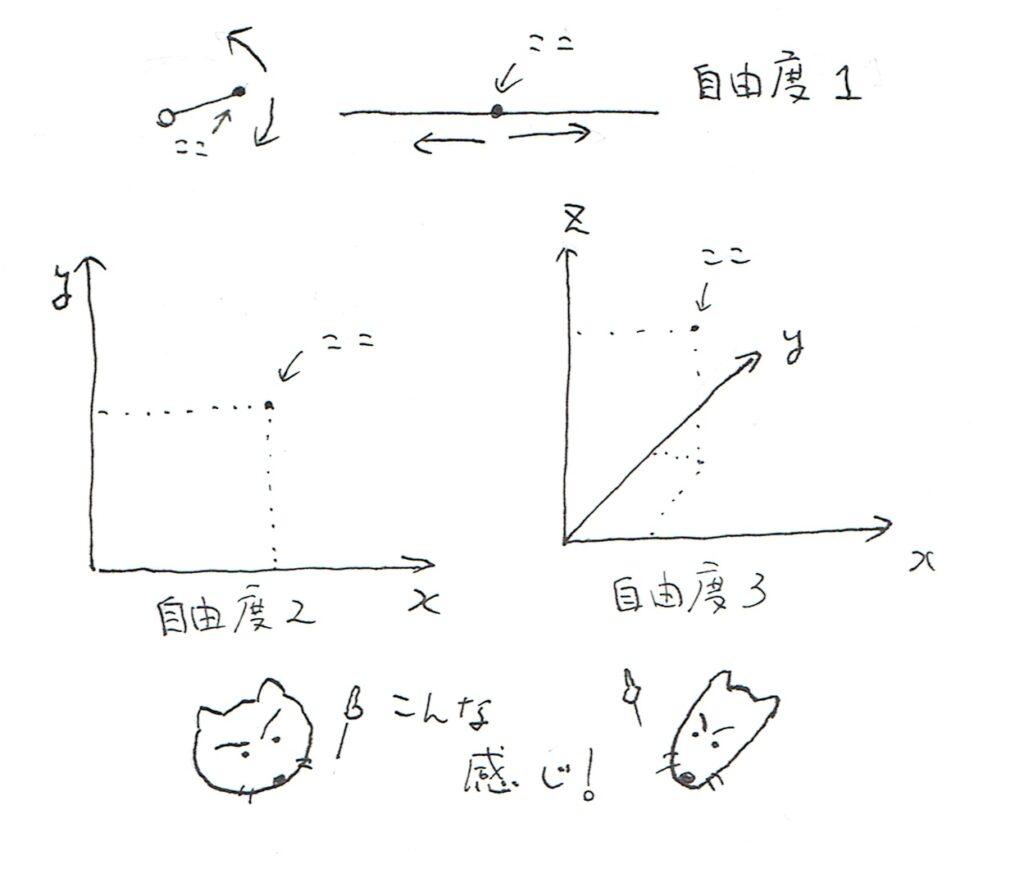
自由度はコントロールするべき対象の数と考えることができる。たとえば自由度1は線上を行ったり来たり、あるいは軸周りを回転する運動で、どの位置に止めるかは線上あるいは軸周りの一点を指定すれば良い。つまり一つの変数を決定すれば良い。人の関節でたとえるなら蝶番関節である。
自由度2は平面上の一点の運動で、位置を決定するにはxとyの二つの変数を決定すれば良い。人の関節で言うなら平面関節。
自由度3はそれに高さが加わり空間内の一点の運動となるので三つの変数を決定する。人の関節で言うなら球関節である。
機械は基本どの可動部分も軸周りか線上を行ったり来たりする運動である。つまり自由度1の運動に制限されている。それらの組み合わせであるから、硬い基礎の上に設置された一つの可動部分が他の可動部分とお互いに動きを制限する。全体としてどんなに複雑そうな動きをする機械でも、どの部品もその組み合わせである一ユニットの動き方はいつも一つである。
一方人では自由度2や3の関節の組み合わせである。右手人差し指で壁のスイッチを繰り返し押すとき、人差し指の位置は毎回決まっていても、肩の位置や肘、前腕の位置の組み合わせは無限に存在し、一つに決定されるわけではない。運動の軌跡や速度は無限に存在しうるし、結果はその時の状況による。つまり様々な運動方法で同じ結果を生み出しうる。
多義性は、人の運動は状況によって、同じ筋収縮が別の運動を生みうるし、異なった筋収縮が同じ運動を生みうると言うことだ。たとえば上腕三頭筋が姿勢や状況によって異なった働きをすることを考えてみれば良い。
またベルンシュタインは言っていないが、神経構造も1つの細胞がたくさんの細胞に繋がり、1つの細胞はたくさんの神経細胞を受けている。つまり1つの電気命令が多様な反応を生みうるし、たくさんの命令が1つの同じ運動を起こしうる構造なのだ。つまり神経構造で見ても1つの命令が1つの運動に対応していない。 これらをまとめると、状況によっても神経の構造によっても、1つの命令が異なった運動を生み出しうるし、一瞬一瞬に変化する状況の中では、1つの同じ命令が次から次へと異なった運動を生み出すということになる。
まあ、回りくどくなってしまったが(^^;)、結論としては、人の運動システムは機械と違ったやり方で作動しているし、同じ運動を繰り返せないのだ。
実際、職人のハンマーを打つ動作は、一回毎に肩や肘の動きや速度の関係が異なっているにも関わらず同じ結果を生み出しているのだが、これをどうやって実現しているのか?これが次回からの話なのだ!(その4に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
スポーツから学ぶ運動システム(その1)
毎日オリンピック競技のテレビ放送を見ている。アスリート達はその時その場でできる最大限のパフォーマンスを生み出そうと必死だ。もちろん上手くいく場合もあるし、失敗する場合もある。上手く最高のプレーを生み出したときに、そして失敗したとしても必死に挑戦するその姿に感動するし、力をもらえるのだろう。
さて、オリンピック競技を一度にいろいろと見ていると人の運動システムの特徴に気がついてくる。今回のシリーズでは、それを足がかりに人の運動システムの特徴について考え、私達リハビリの臨床に役立つように検討してみたいと思う。
1.人は同じ運動を繰り返せない
以前から書いていることだが、不思議に思うのはゴルフとテニスである。自分の好きなところにボールを置いて、自分の好きなタイミングで慣れたクラブで打つゴルフが、一球一球速度もコースも高低も球種も異なる球を動きながら打つテニスと同様に難しいのはなぜか?
あるいはバスケットボールで、全速力で走りながら敵の厳しいディフェンスをかわして打つシュートと自分の好きなタイミングで自由に打てるフリースローが同様に難しいのはなぜか?
これは人の運動システムの基本的な特徴ゆえに起こる不思議である。
その基本的特徴が何かというと「人の運動システムは同じ運動を正確に繰り返すことができない」ということだ。つまり人の運動システムはテニスのように変化する状況の中で適応的に身体を変化させ適切な課題を達成できるにもかかわらず、ゴルフのような単一の課題(置いたボールを叩く)のような同じ課題を正確に繰り返すことが難しいのである。思ったところに少しでも近づけるようにプロのゴルファーは気の遠くなるほどのたくさんの練習を、アメリカのNBAのプロバスケットボールの選手はコートに立つまでに通常100万回以上のフリースローの練習を繰り返しているのである。
この特徴に一番最初に気づいたのはロシアの運動生理学者のベルンシュタインだろう。彼は労働者の技能について研究をしていた。職人さんがハンマーで釘の頭を正確に叩く様子を運動分析装置で見てみると、毎回異なった軌跡で開始位置や叩く速度も微妙に異なっていることに気がついたのである。この微妙な運動のズレはプロゴルファーのスイングやバスケットボール選手のフォームにも見られる。
通常私達は職人さんの動きを見ると、「正確に同じ運動を繰り返している」と考えてしまう。「技を何度も繰り返すことによって、頭の中にプログラムができて、それによって正確に運動を繰り返して、同じ結果を出している」と考えるわけだ。
しかしこれはロボットのように人の運動システムの作動を考えてしまう結果だ。機械は同じ運動を繰り返すことが得意である。機械では、硬い安定した躯体と可動部分を厳密に制限して必要以外の動き(ブレ)をなくすことで同じ運動を繰り返し、同じ結果を生み出している。
だからもし人の腕を模した機械の腕で、中枢の関節の動きが1ミリ以下でもずれれば、先端の動きの誤差は遙かに大きくなってしまう。しかし職人さんの腕全体の動きは常に様々な要素でズレているのだから、釘の頭をハンマーで捉えることは常に失敗してしまうかというとそうでもない。
つまり「人は同じ運動を繰り返すのができない」ので、職人さんやアスリートは「毎回異なった運動で正確に同じ結果を生み出している」ということになる。これは不思議なことである。これがどのように行われているかを知ることは私達にとっては非常に有益だろう。次回からこれを考えてみたい。(その2に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
知覚システムについて考える(その1)
学校では感覚系は視覚、聴覚、嗅覚、味覚、触覚などとモダリティ毎に独立した感じで習ったと思います。
しかしアフォーダンスを提案した生態心理学のギブソンはそれぞれの感覚は独立したものではなく、それぞれが互いに緊密に結びついていて一つの知覚システムとして理解するべきだと言っています。
たとえばベルンシュタインがわかりやすい例を挙げていて、人の眼球を動かない様にすると、見ている対象の次元、大きさ、形や対象までの距離などもわからなくなるそうです。つまり対象を網膜の中心に据えたり、焦点を合わせたり、輪郭をなぞる眼球周囲の筋群の活動に伴う筋感覚も見えの知覚に参加して、これによって形や大きさや対象までの距離などがわかるのだと言うのです。
つまり見るにしても聞くにしても触る、味わうなどにしても常に全身の筋群でそれを行っているわけです。機械の様に気温は温度センサー、見えは光学センサーなどと単独に情報を得ているわけではないのです。
人は様々な感覚を同時に使っていろいろなものを理解しています。まあ、赤ちゃんを見ていると、見たものに手を伸ばして触って舐めて、いろいろな感覚で対象を理解していますしね。あんなイメージなのでしょうか。
また知覚システムは、受け身ではなく能動的であるという特徴を持っています。目は単に見ているのではなく、見つめ、調べ、確認しているのです。耳も単に外界の音を流し込まれているのではなく、最も重要な音を選んで聞いているのです。
ギブソンは、骨格とそれをつなぐ軟部組織や筋群などが一体になって構成される人の身体をボーンスペースと呼んでいます。彼の言う触覚系(筋の固有覚を含む)は、全身常に一体となって対象物を動きながら知覚し、同時に自分の体の状態も知覚しているのです。
こうしてみると知覚システムとは、様々な感覚が緊密に連絡し合っていて単独の感覚では語れないものであり、動きながら知るシステムであり、知覚しているのは対象だけでなく同時に自分の身体のことも知るシステムであることがわかります。対象を知ることが自分の体の状態を知ることでもあり、自分の体の状態を知ることが対象を知ることでもあるのです。
そうすると脳性運動障害後にひどい過緊張が現れることがあります。ひどい例だと全身の動きは失われ、顔は仮面様、眼球の動きも見られなくなります。となると、全身で動きながら触覚系について知るというボーンスペースが機能しなくなると思われます。つまり目は開いて見ていても、形や大きさや次元は認知できないかも・・・(その2に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「CAMRの旅お休み処 シーズン3 その3」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
CAMRの旅お休み処 シーズン3 その3
「軌跡が決まるのは奇跡的?なんちゃって (^^;) ベルンシュタイン問題続きの続き」
秋山です。タイトルにこりすぎると、ろくなことはないのですが・・・。
その昔、私は養成校の教官をしていまして。その頃の悩みの種が「作業分析」の講義ノート作りでした。当時の教科書には、作業の一般的な分析をやれ、と載っていまして、社会的な意味や精神面への影響などとともに運動についても話さなければなりませんでした。
この作業を遂行するときにどんな動きが必要で、その動きのためにはどこの関節がどの方向にどれくらい動いて、その筋肉は・・・とやるのですが、考えれば考えるほどロボットみたいな動きになるし、使う筋肉も姿勢も入れれば結局全身か?ということになってしまいます。
学生さんに、「この工程の動きの関節可動範囲はこれでいいのですか」と質問されても、「うーん、良いと言えば良いような、それだけじゃないといえばないような」と何とも曖昧な返事で。(当時の皆さん、すみません) 机の上のコップを持つ、という時、人によって動きは違うし、肝心なのはコップまで手が届くことなのに、肩関節がどうとか肘が・・・というのは本筋ではないと思いながらも、共通の一つの答えを探しているようなものでした。
長々と思い出話をしてしまいました。
コップに手を伸ばした時、一度として同じ軌跡を通りません。一回ごとに通り道や速度は異なります。環境が同じでも同じ軌跡を通らないし、ましてや環境が異なればそれに応じた軌跡を通るでしょう。当たり前といえば当たり前ですが、正しいやり方を求めていると見落としてしまいます。
軌跡は異なるのですが、同じ結果を生み出すことができます。手がどう通っていってもコップをちゃんと持てる。この辺のことは、CAMRホームページ 人の運動変化の特徴 その2 異なった方法でいつも同じ結果を出すこと をご覧ください。
ふー、やっと先に進めるかな。
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「CAMRの旅お休み処 シーズン3 その2」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
CAMRの旅お休み処 シーズン3 その2
「自由度ってやつは・・・ ベルンシュタイン問題続き」
秋山です。前回がちょっと適当(良い意味ではなくてね)だったので、追加です。
「運動制御がなぜ難しいか」について、ベルンシュタインが挙げている一番目の問題点。以下、著書の「デクステリティ」から。
「私達は体肢と頭にある装置だけでも100近くの動き(自由度)があり、首や体幹の柔軟性を加えれば、その数はさらに膨大なものになる。歩いたり投げたりする時、いくつもの関節で異なる動作が同時に行われる。複雑な動作の要素一つ一つに注意を向け個別に制御するとしたら、膨大な注意を配分しなければならない。」
個々の筋肉と運動野が1対1で対応し、脳が一つ一つに指令を出しているという考え方では無理があるのではないか?ということでしょうね。
まだ続く・・・
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「CAMRの旅お休み処 シーズン3 その1」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
CAMRの旅お休み処 シーズン3 その1
「What is ベルンシュタイン問題?」
秋山です。シーズン3はCAMRを支える理論などの中から、私がよくわからなかった(時として今もわからない)ものを、徒然なるままに復習していこうと思います。いい加減、別タイトルでも良いような気もしますが・・・。
何かの参考になれば幸いです(^_^)
「ベルンシュタインを読む!」シリーズの中に、「ベルンシュタイン問題」というのが出てきます。最近の運動制御の話にはちょこちょこ出てきています。まず、自由度の問題について。
上肢だけを見ても、複合関節である肩・肘・手、手指の関節、それぞれに筋肉がいろいろ付き、また神経が・・・となると、制御しなければならないものが膨大になります。手を使うとなると両手、そして姿勢制御と考えると、脳は瞬間的にものすごいコントロールを行わなければならない。それはあまり現実的ではない。
もう一つ、文脈性の問題。同じようにやったからといって、いつも同じ結果になるとは限りません。環境の変化でも運動の結果は変わってきます。でも、異なる運動で同じ結果は出せる・・・。自由度の方は「ほほー、なるほど」と思ったのですが、文脈性の方は理解が今ひとつ(^^;)
動作から見ると、机の上のコップをとる時、手がコップに行き着くまでの通り道は無数にあります。どのように持つかも無数にある。無限にある解の中から、1つを選んで行っている。これは、従来の運動プログラム説では説明しきれない、ということになります。
続く~
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「「リハビリの夜」を読む!(その6;最終回)です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
「リハビリの夜」を読む!(その6;最終回)2013/3/23
第二章のコラム「脳性まひリハビリテーションの戦後史」の冒頭で、著者は「健常な動き」を目標としたようなリハビリについて、「少数派に過剰適応を強いる同化的な発想」と指摘しています。
「障害」という体験は、「ある社会の中で多数派とは異なる身体的条件を持った少数派が、多数派向けに作られた社会のしくみになじめないことで生じる生活上の困難のことである」とし、その責任を一方的に少数派に押しつけることはできないと述べています。しかし過去の歴史を見ると、社会を変えていくのではなく少数派に過剰適応を強いてきた、といいます。
リハビリ現場においても、著者が自分の体にとって負担の少ないやり方で動こうとするたびに、「その動き方は正しくありません!」と介入されたと言います。これも多数派にみられる「健常な動き」を、一方的に「規範的な体の動かし方」と決めつけて、少数派に無理強いするような同化的な発想だと述べています。
そういえば、セラピストの間ではよく「正常運動」という言葉が聞かれます。そこに同化的な発想は潜んでいないでしょうか? クライエントに理不尽な過剰適応を強いていないでしょうか?
今回で、「リハビリの夜」を読む!シリーズは最終回となります。これまで読んでくださった方々、どうもありがとうございました。
初回にも書きましたが、この本はセラピスト必読の書だと思います。一人でも多くの方に、熊谷先生の声に耳を傾けていただきたいと思います。また、今回は取り上げませんでしたが、ベルンシュタインの身体内協応構造から一歩進めて、身体外協応構造という興味深いアイデアも提案されています。興味を持たれた方がおられましたら、是非本書を手に取ってみてください。
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!