

スポーツから学ぶ運動システム(その3)
前回は人の運動システムが同じ運動を繰り返せない理由の1つとして人の運動システムの粘弾性の性質を挙げた。
ベルンシュタインは他に自由度と多義性の問題を挙げている。
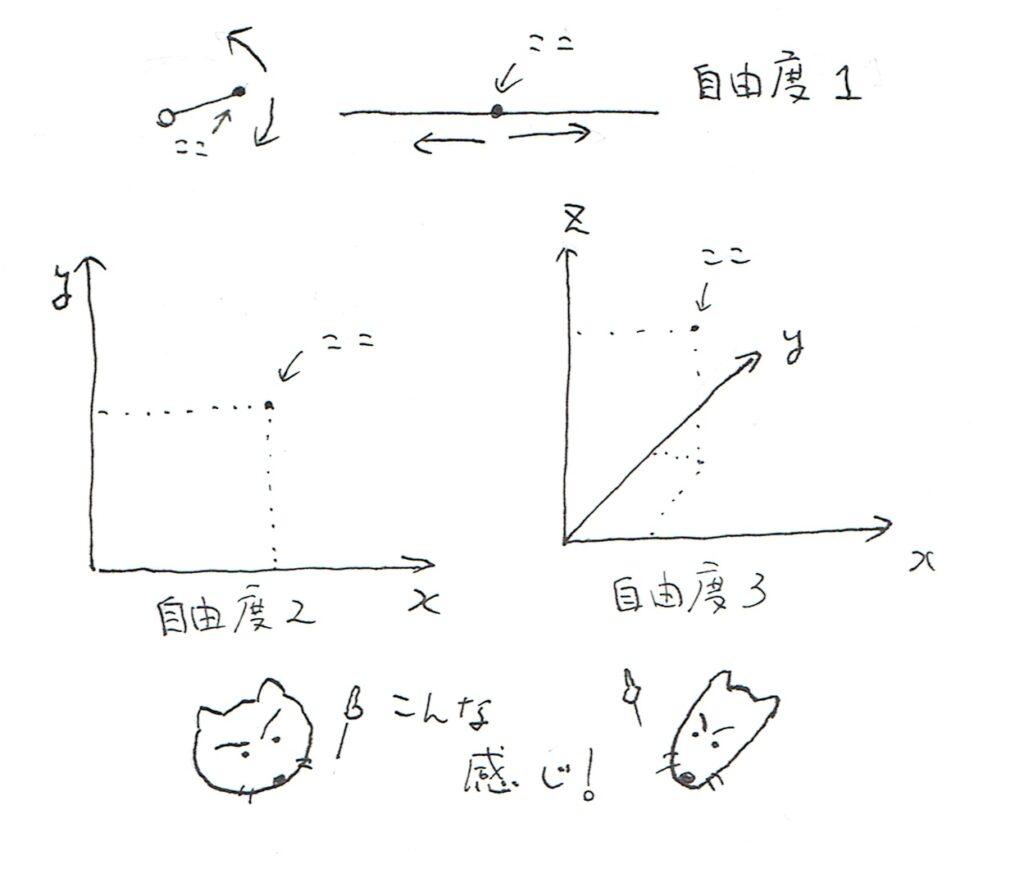
自由度はコントロールするべき対象の数と考えることができる。たとえば自由度1は線上を行ったり来たり、あるいは軸周りを回転する運動で、どの位置に止めるかは線上あるいは軸周りの一点を指定すれば良い。つまり一つの変数を決定すれば良い。人の関節でたとえるなら蝶番関節である。
自由度2は平面上の一点の運動で、位置を決定するにはxとyの二つの変数を決定すれば良い。人の関節で言うなら平面関節。
自由度3はそれに高さが加わり空間内の一点の運動となるので三つの変数を決定する。人の関節で言うなら球関節である。
機械は基本どの可動部分も軸周りか線上を行ったり来たりする運動である。つまり自由度1の運動に制限されている。それらの組み合わせであるから、硬い基礎の上に設置された一つの可動部分が他の可動部分とお互いに動きを制限する。全体としてどんなに複雑そうな動きをする機械でも、どの部品もその組み合わせである一ユニットの動き方はいつも一つである。
一方人では自由度2や3の関節の組み合わせである。右手人差し指で壁のスイッチを繰り返し押すとき、人差し指の位置は毎回決まっていても、肩の位置や肘、前腕の位置の組み合わせは無限に存在し、一つに決定されるわけではない。運動の軌跡や速度は無限に存在しうるし、結果はその時の状況による。つまり様々な運動方法で同じ結果を生み出しうる。
多義性は、人の運動は状況によって、同じ筋収縮が別の運動を生みうるし、異なった筋収縮が同じ運動を生みうると言うことだ。たとえば上腕三頭筋が姿勢や状況によって異なった働きをすることを考えてみれば良い。
またベルンシュタインは言っていないが、神経構造も1つの細胞がたくさんの細胞に繋がり、1つの細胞はたくさんの神経細胞を受けている。つまり1つの電気命令が多様な反応を生みうるし、たくさんの命令が1つの同じ運動を起こしうる構造なのだ。つまり神経構造で見ても1つの命令が1つの運動に対応していない。 これらをまとめると、状況によっても神経の構造によっても、1つの命令が異なった運動を生み出しうるし、一瞬一瞬に変化する状況の中では、1つの同じ命令が次から次へと異なった運動を生み出すということになる。
まあ、回りくどくなってしまったが(^^;)、結論としては、人の運動システムは機械と違ったやり方で作動しているし、同じ運動を繰り返せないのだ。
実際、職人のハンマーを打つ動作は、一回毎に肩や肘の動きや速度の関係が異なっているにも関わらず同じ結果を生み出しているのだが、これをどうやって実現しているのか?これが次回からの話なのだ!(その4に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!














コメントフォーム