スポーツから学ぶ運動システム(その6)
昔リハビリの養成校の教官をしていた時、三つ玉のジャグリングを運動学習の課題として使うために自分でも練習していた。最初は課題達成のために視覚情報が重要な役割を果たしているのは間違いない。見ないととてもできないからだ。しかし慣れてくると短い間なら見なくてもできるようになるのである。つまり視覚に頼らなくてもいつのまにか身体感覚だけでジャグリングができるようになる。
どんな運動でも全身を使うものだ。従ってどんな運動学習においても常に全身のボーンスペースを通して運動課題を達成するための知覚情報の利用方法を学習していることになる。つまりスキルが熟練するとは、多種類の知覚情報を基に課題達成のための運動スキルの実施が可能になるということだろう。つまり視覚情報でもできるが、視覚情報がなくても一時的には固有各情報などでもコントロールできるようになるということだ。
さて、これまでをまとめると、運動学習とは次のように理解することができる。
新しい運動、新しい課題達成方法を学習するためには、まずその課題達成方法がある程度安定してできるような協応構造を探索し、試行錯誤し、安定させる必要がある。これが第一段階。(協応構造探索の段階。ある程度安定した運動を生み出せる段階)
そしてその安定した協応構造を基に、課題達成時の知覚情報を利用して、課題達成を状況に応じて柔軟に変化させて課題達成の方法をその時、その場で生み出すための知覚情報の予期的利用に関するスキルを磨き上げて行くのである。これが第二段階。状況は常に変化するため、運動スキルの維持にも継続した練習が必要。
たとえばバスケットボールのフリースローを例にとって考えてみよう。あなたは初めてバスケットボールを持ち、ゴールに向かって投げることになる。経験者のフォームを真似て、右手でボールを下から持ち、左手で側面を支えて、頭の前でボールを構えてみる。そして投げてみる・・・ボールはまっすぐには飛ばないし、全然ゴールにも届かない。手脚の動きもぎこちなく、バラバラに動いている感じである。
経験者が「手だけでなく、膝を使って全身で伸び上がるように」と手本を見せてくれる。そこで真似をしてみると飛距離は伸びて、ゴール近くまで届くようになる・・・・しばらくすると手首を使うように言われてこれまた真似をして始めてみる・・・・最初は腕をメインに使って、体の動きや手首の動きもバラバラだったが、次第に下半身のバネと手首が連動して、一つの動きとして安定してくる。つまり協応構造が芽生えてくる。
こうしてこのフォームでボールを投げ続けると、次第に体が自然に動くようになりゴールにボールが当たることも増えてきた。一人一人の運動システムの物理的性質は異なっているので、人とは違ったあなたらしいフォームができてくる。これが協応構造のできあがってくる過程だ。
しかしボールはなかなかゴールに入らない。ボールがただゴールに届くだけではダメなのだ。あなたは全神経を集中してゴールに向かうようになる。それまでは自分の体の動かし方が気になっていたのだが、やがて体にはそれほど注意が向かなくなる。これまでの運動学習理論では「自動化の過程」と言われたものだ。 体の動きが気にならなくなると、自然と注意はゴールとゴールに向かうボールに向くようになる。上手くゴールできたときの体の感覚にも気がつくようになる。ひたすらこれを繰り返す。
フリースロー練習だけでは物足りなくなってくるので、コート上の様々な角度、距離からもシュート練習を行う。最初は上手く行かないが、やがて距離や角度が異なってもそれなりにゴールに近いところにボールをコントロールできるようになる。これをひたすら繰り返す。
こうして1球目には失敗しても、2球目、3球目にはゴールする確率が高くなってくる。結果を見て修正することができるようになったのである。これが「課題時の知覚情報の予期的利用」のスキルである・・・・ さて、これらの中で経験者のアドバイスと呼ばれるものが、CAMRではセラピストが現場で使う「運動課題」となる。CAMRではセラピストは課題の提案が、一つの重要な役割である。課題は言語、身体模倣、徒手を含む介助、環境設定を通して伝えられる。
そして一人一人の運動システムの物理的性質は異なっているため、セラピストは対象者の物理的性質を探索し、試行錯誤しその個人に合った運動課題を修正する必要がある。
以前は運動学習では「一つの正しい運動を繰り返す」ということも言われていたが、実際には「繰り返し」と「試行錯誤」がその本質である。(その7に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!



治療方略について考える(その4)
治療方略:治療の目標設定とその目標達成のための計画と方策
前回ではロボットは特定の機能を達成するために組み立てられたもので、できあがった段階から特定の機能達成のための最低限のメカニズムしか持っていないと説明しました。しゃべって歩くのなら、そのことしかできないのです。
一方人の運動システムは、驚くほど余剰なリソースと豊富な運動可能性を備えています。人にとって必要な課題はその時、その場でどんどん変わっていきます。移動し、隠れ、探し、捕まえ、加工し、食べるなどです。多様な課題を達成するためには、その時その場で常にその状況に相応しい新しい運動や機能を生み出す必要もあります。ロボットのように機能特定ではなく、その時々で必要な課題を達成するためには必要な機能を無限に生み出す能力を持っているのです。その可能性を生み出すための余剰なリソースであり、多様な運動可能性を最初から持っているわけです。
そして人の運動システムは機械とは構造も作動も違うのに、機械修理型の治療方略で良いのだろうかというのが大きな疑問なのです。
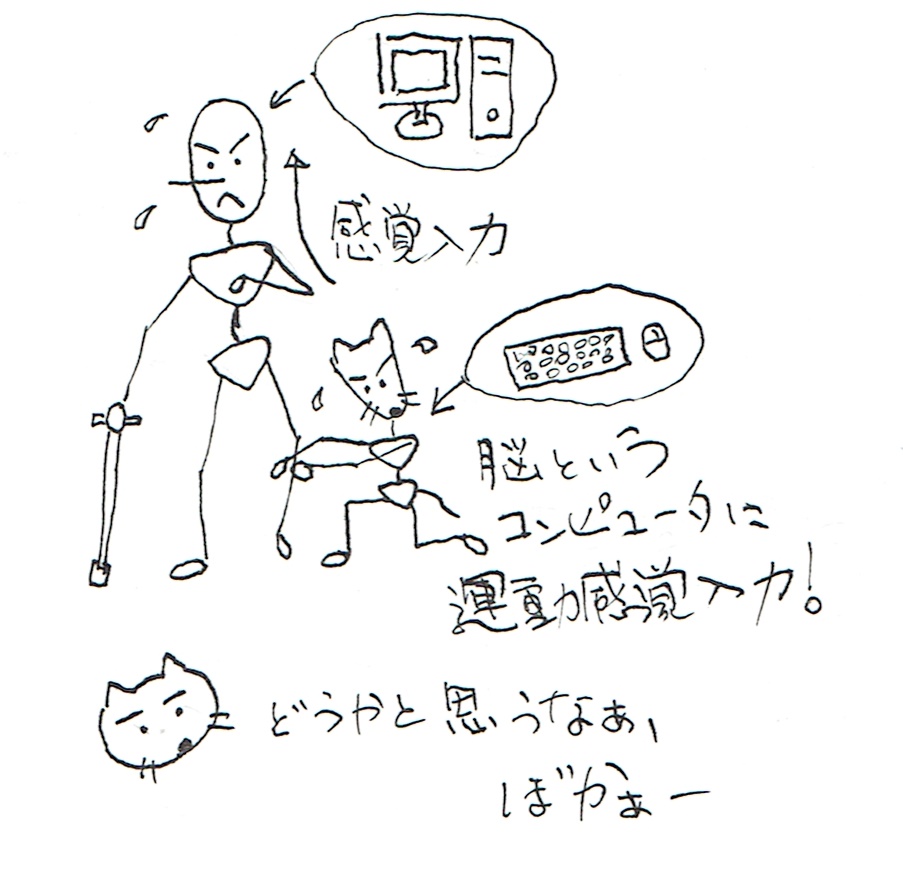
さて、「感覚入力は脳の栄養であり、それを通じて運動を学習する」というアイデアが広く受け入れられていますが、これも機械修理型の治療方略の考え方です。体は脳によってコントロールされている→脳性運動障害は脳が壊れて生じる。体は悪くない→だから、コンピュータのように脳のプログラムが健常者のものに書き換えられれば、からだも上手くコントロールされる、と考えているわけです。機械修理型はまず悪い部分や要素を見つけます。脳性運動障害では悪いのは脳だけで体は悪くない、脳だけを治すと考える訳です。
だからこのアプローチにおける運動学習というのは、コンピュータのプログラム入力のように、感覚入力によって筋活動のパターンや収縮のタイミングのプログラムを一から学ぶことだと考えています。そして臨床ではこの考えに基づいて毎日毎日「正しい」と思われる運動がセラビストと患者によって他動的に繰り返されたりします。
でも実際人の運動学習が、1つの運動を獲得するのに何度も何度も、あるいは何ヶ月も何年も同じ運動を繰り返さないと獲得できないような低性能なコンピュータなら、めまぐるしく変化する現実世界の中で、人類はとっくに滅びてしまったことでしょう。
更に大事なのはセラピストによって他動的に動かされる運動は、とても自律的な運動プログラムに変化するとは思えませんよね。他人によって体を動かされている状態を入力、経験しているだけだからです。
ロボットは壊れると自分で直すことができないので、人が直す必要があります。それで機械修理型の考え方だと、壊れた脳はセラピストが直接感覚入力で操作するというやり方に抵抗がないのかもしれません。
実際にはこの運動学習の考え方自体が、ロボットをモデルに考えられていて、現実の人の運動システムはまったく違う構造、作動であることに気がついていないのです。(システム論による神経系の機能や運動学習はまったく別のアイデアになります。いずれ紹介しようと思います)
この機械修理型の治療方略を基にしたアブローチは日本では50年以上の歴史がありますが、未だにマヒが治ったという報告がないのは、この考え方ややり方が間違っているかもしれないと考えた方が現実的です。
機械修理型の治療方略が特に脳性運動障害で上手くいかない理由は他にもありますが、ここではこれだけにしておきます。
一方整形分野などでは、機械修理型は実は上手く機能することもあります。もっとも上手くいく場合には一定の条件があります。その条件の説明はここでは脇道にそれてしまうので省きます。まあ上手くいったり、行かなかったりです。
さて、次回からは機械修理型ではなく、臨床で自然に発生する、多くのセラピストに自然に獲得される治療方略について紹介していきたいと思います。(その5に続く)
![]()
システム論の話をしましょう(その8)
今回は「課題達成をリソースとスキルで説明する」というアイデアの有効性についてもう少し検討してみます。
従来学校で習う視点では、起立ができないと四頭筋などの筋力検査を行い、弱っている筋の筋力を改善するというアプローチを学んできました。つまりシステムの作動ではなく、構造を中心に考えます。特に四頭筋が弱っていれば、座位でおもりやゴムベルト、徒手などで四頭筋力を増やすという方法もよく行われてきました。
しかしこれではリソースの改善だけを考えたアプローチになってしまいます。座位で四頭筋だけ鍛えれば起立できるかと言えばそうでもないからです。たとえば「椅子に座って、おもりを足首につけて膝を伸ばす」課題は、四頭筋筋力を改善するためによく用いられる方法ですが、これをスキルの視点から見ると「骨盤と大腿を座面で固定され、下腿を持ち上げる」というひどく単純なスキルを練習していることになります。
でも実際に起立では、四頭筋は「座位での広い基底面から、脚だけの狭い基底面に大きく前方・上方へ重心を移動しながら、なおかつその狭い基底面内に重心を保持して身体全体を上方に持ち上げることを他の全身の筋群と協調しながら行うスキル」の中で働いているのです。
座位でのおもりをつけての四頭筋訓練はほぼ筋繊維を太くしているだけで起立に必要なスキル学習はまるっきり行っていないのです。起立に必要なスキルは全身的なものです。起立が危うい人は全身的に試行錯誤を通して必要なスキルを学ばなければなりません。つまり起立できるようになるためには実際に起立練習をして、起立のためのスキルを学習する必要があるのです。
座位で筋トレをすれば、また改めて起立練習で起立のためのスキルの練習をし直す必要があります。もちろん起立練習が到底無理なら、座位でまず筋繊維を太らすことには価値があると思います。しかし、少し手伝ったり、椅子の座面を高くしたり、前方の手すりを用意したりと利用可能なリソースを増やしてあげることによって、起立の課題達成がなんとか可能なら、最初からそのような形での起立の繰り返し練習をした方が効率的だし患者さんの達成感や満足感も上がるでしょう。
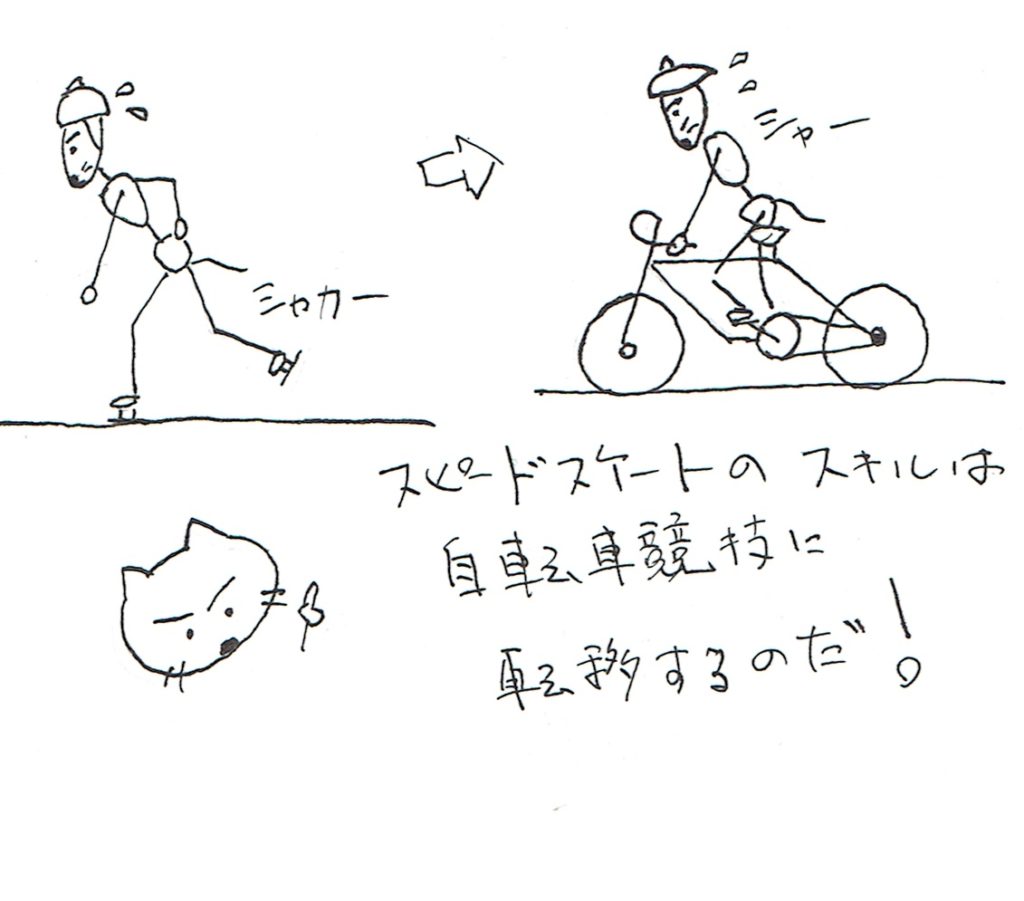
またリソースとスキルという視点で見るとこれまで理解できなかったいろいろな運動の現象が理解できるようになります。たとえば運動学習の効果の転移です。有名なところではテニスのスキルはラケットで球を打つ同じような運動の形に近い卓球には転移しないのに、形はまったく似ていないスピードスケートと自転車競技の間では明らかに運動学習効果の転移が見られます。(日本でも冬のオリンピアであるスピードスケートの橋本聖子さんが夏のオリンピックの自転車競技の代表になって話題になりました)
実は運動の形は似ていなくてもスピードスケートと自転車競技は、スキルの視点からはとても似通っていることがわかります。どちらも「狭い基底面を持つ道具の上で、バランスを保ちながら左右交互に重心移動をし、体重移動した片脚を力強く下方に踏みしめる」というスキルが共通しているのです。リソースや運動の形はまるっきり異なっていても、似通ったスキルを使う課題同士なら運動学習の効果の転移が起こるというわけです。
だから歩行を改善するなら、「立位でバランスを保って交互に左右への重心移動をしながら、片脚で体重支持しては体重支持しない方の片脚を持ち上げるような運動課題をすれば、これで身に付けたスキルは歩行へ転移する」と考えることができます。
またどのリソースをどのように使うかを見ることで、より実際的な運動分析を行うことも可能です。(CAMRではこれを「Resource-Skill Analysisリソース-スキル分析。RSAと略す」と呼んでいます)たとえば前方の手すりと上肢で主に前方への重心移動に使っているのか、体の持ち上げに使っているのかを見ることで運動システムが何を苦手にしているかが分かります。片手で手すりを持ち、前方への重心移動に使っているなら、わざわざ手すりと片手というリソースを「前方への重心移動」のために使っています。つまり前方への重心移動が苦手なのです。この場合、「体幹の柔軟性リソース」を改善して「手すりと片手というリソース」と置き換える、つまり手すりがなくても起立ができるようにすることもできます。(その9へ続く)
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!