≧(´▽`)≦
みなさん、ハローです!
あるある!シリーズの第一弾が出版されました!
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
現在、出版記念の無料キャンペーンを実施しています。ぜひこの機会にCAMRのアイデアに触れてみください。
☆★☆★☆★★☆出版記念 無料キャンペーン★☆★☆★☆★☆
著者 : 西尾 幸敏、
書名 : 脳卒中あるある!: CAMRの流儀
無料キャンペーン期間: 11月26日(金)17:00~12月1日(水)16:59
☆★☆★☆★☆★☆★★☆★☆★☆★☆★☆★★☆★☆★☆★☆

【はじめに】
この本は、脳卒中の患者さんが質問してくる内容やセラピストが脳卒中患者さんを見たときに「あるある!」と感じる素朴な疑問を中心に展開されます。たとえば「なぜ麻痺側の手脚は硬くなるの?」、「どうしてまっすぐに座れないの?」、「どうして良い方の脚が出ないの?」、「分回し歩行は治さないといけないの?」といったことです。
これらの疑問に対して、この本ではできるだけ二つの立場から答えます。一つは伝統的に学校で習う「要素還元論の立場」です。もう一つは現在の日本の学校では教えられていない「システム論」の立場です。
このように説明すると多くの人が戸惑います。「二つの異なった立場があるの?」ということに。
当然ですよね。学校で一つの立場の考え方、見方だけを教えられていると、それが真実であると信じてしまうものです。「それが真実!それが正解だから、それ以外の考え方は間違い」と簡単に信じてしまいます。まあ、他に選択肢がありませんし、権威あるはずの学校でそう教えられれば、そう信じてしまうのが自然です。
それに実際に今の状況では、学校の考え方を正解として学ばないと国家試験には受からないというのが現実です。それがこの世の中の仕組みですから。教育は権威ある立場の人々の考え方を正解として人々に伝えるものだからです。その仕組みの中では、権威ある人々の考え方が正しいものとされ、尊重されるべきものです。
そしてそのもう一つの未知の考え方を嫌悪します。だってこれまで自分が真実だと信じ、言葉にし、同僚や後輩に誇りを持って話してきた考え方が「間違っているかもしれない」と、その未知の考え方が脅(おびや)かしてくるからです。これまた無理のない恐れであり、嫌悪です。
しかし、世の中には様々な考え方があり、対立する考え方も存在するものです。
中世ヨーロッパでは、キリスト教会を中心として「天動説」が真実とされました。それは神の真理であり、それに異を唱えるものは異教徒とされ、捕らえられ、考え方を矯正され、あるいは焼き殺されました。キリスト教会の考え方を真実として、それに異を唱えるものは「協会の権威を失墜させる恐れ」があるために弾圧されたのです。教会の権威を守るために恐怖が使われたわけです。
それでも次から次に天動説に異を唱える人達が現れました。実際に自分たちで観察する天体の動きは、天動説の説明では矛盾が出るからです。人の知性は「説明の矛盾」を放っとけないようです。ガリレオ・ガリレイも「それでも地球は回っている!」と言ったとか、言わないとか・・・・
そして最後には天動説が誤りで、地動説が正しいということになったわけです。
少し大げさな展開になってしまいましたが(^^;)、実際に臨床に出て、いろいろな脳卒中の患者さんを見ていると、「本当に学校で習ったことは正しいのだろうか?」と思うことに出会います。「もっと他に矛盾のない説明があるのではないか?」と思ってしまいます。
つまりその一つがシステム論の考え方です。
むしろ考え方が一つだけというのは恐ろしいものです。「それが真実であり、それさえ理解しておけば良い」となればそこで進歩は止まってしまいます。リハビリも科学を基礎として絶え間なく議論がなされ、進歩を続けるもののはずです。ところが日本ではこの分野は一日千秋の如く変化がないのです。
つまりこの従来の知識体系には強力なライバルが必要です。「どちらが臨床では有効か?あるいはこの場合はどちらが有用か?」という議論は、お互いを高めあうものです。そういった意味でもここでは二つのアイデアを少しだけ競わせるような流れができれば良いと思っています。読者がこれから考えていくきっかけになれば幸いです。
とは言っても、僕は「システム論の考え方が真実である」とも考えていません。そんなことは一臨床家にとっては扱いがたいものです。僕達、臨床家にとっては、一つの理論が真実かどうかよりは、目の前の患者さんが少しでも良い状態になるのに役立つかどうかが大事です。
そこで僕は次のように考えることにしています。
「理論は、問題を説明し、問題を解決するための道具である」
道具であれば、真実かどうかは関係なくなります。「スプーンは真実である」などと主張するのはナンセンスです。むしろ道具なら状況によって使い分ける方が自然です。「スプーンはすくって食べるのには便利である」ですよね。大きなお肉を食べるにはフォークとナイフは便利です。カットしてあるお肉ならフォークでも箸でもいけます。うどんはお箸かフォークが便利です。道具というのは課題と状況によって使い分けられるものです。
つまり理論も「問題を説明し、それによって問題解決の方法を生み出す道具」として考えるのです。「この問題をより良く説明し、解決するにはどちらの理論を使えば良いか?」と考えれば良いのです。「理論が真実かどうか?」にこだわらなければ気楽なものです。そんな面倒な議論は学者さんにでも任せておけば良いのです。
ヴィトゲンシュタインという哲学者は、天動説か地動説かはどの立場に立って物事を観察するかの違いであると言ったそうです。つまり「地球上に立って空を見上げれば天動説は正しい、太陽の上に立って空を見あげたと仮定すれば地動説は正しい」という訳です。実際、天動説の知識は大航海時代以前から自分の位置を知るためには非常に重要な道具だったわけです。
さて、CAMR(Contextual Approach for Medical Rehabilitationの短縮形。和名は医療的リハビリテーションのための状況的アプローチ。CAMRは「カムル」と読みます)は、日本生まれのシステム論を基にしたアプローチです。
CAMRでは、理論は道具として扱うので、学校で習う「要素還元論」の見方も「システム論」の見方も共に、「説明と問題解決の道具」として扱います。それによって、CAMRでは問題解決のための二つの道具、つまり二つの選択肢を持つことになります。このことは僕達の問題解決者としての可能性をより大きくしてくれます。解決の選択肢を二つ持つことになるのです。一つのやり方がダメでも、もう一つの方法を試すことができるからです。
詳しくは本文で説明しましょう!
この本を通じて皆様の臨床での問題解決能力が格段にアップすることを祈っております。
またこの本の出版には、CAMR研究会のメンバーの協力が大きく貢献しています。特に編集の田上幸生氏の目を見張るセンスと努力によることが多いです。ここに感謝申し上げます。
西尾 幸敏
【目次】
脳卒中あるある! -CAMRの流儀-
目次
はじめに
第一部 要素還元論とシステム論
第1章 人は機械なのである!-学校で習う要素還元論と機械修理型治療方略
第2章 システム論と状況変化型治療方略
第二部 脳卒中、あるある!
セラピストあるある!(その1)
セラピストあるある!(その2)
第3章 あるある!その1「なぜ麻痺側の手脚は硬くなるの?」
1.学校での説明「硬くなるのは症状である」
2.CAMRの説明 「硬くなるのは運動システムの問題解決である」
3.過緊張と偽解決「問題解決が新たな問題を引き起こす」
コラム 偽解決とは?
4.硬さに対するCAMRのアプローチとは? 「硬さ(支持性)と運動性の調整」
5.「一番安定する状態に落ち着く」という運動システムの性質「自己組織化」
6.多要素多部位同時治療方略-CAMRの治療方略
第4章 あるある!その2「運動時の緊張や努力は硬さを強めるから、緊張する動作や努力するような動作は避けた方が良い?」
1.学校で教える考え方「過緊張の状態は良くないことなので避けよう!」
2.CAMRの説明「過緊張でも多様・多量に使うことで運動リソースと運動スキルの変化が起きる」
3.「運動リソースを豊富にして、運動スキルを多彩にする」-課題達成治療方略
4.「多要素・多部位同時治療方略」と「課題達成スキル治療方略」-CAMRの二つの中心的治療方略
第5章 あるある!その3「手がどこにあるかわからない。人から借りたもの、他人の手のようだ」 -因果関係にまつわる誤解について考える
1.Carr & Shephardらの報告
2.因果関係にまつわる誤解の例
3.リハビリ領域でよくある因果関係の誤解
第6章 あるある!その4「プッシャー・シンドロームって訳わかんないよね」
1.学校で教える説明「高次脳機能障害?」
2.CAMRの説明「健康時方略」
3.セラピストと患者さんが協力して作り出す「プッシャー・シンドローム」
4.正しさ幻想を捨てましょう!
第7章 あるある!その5「分回し歩行は治すべき?できるの?」
1.学校で教える説明「異常歩行である!」
2.CAMRの説明「”異常”ってどういうこと?」
3.ただし、機能的に改善できる場合が多い
4.形の変化を目標にしない-状況性という性質
コラム 「人の運動システムは機械とは全く異なる性質を持っている」
世の中、あるある!
第8章 あるある!その6「おかしい!良い方の脚が出ない・・・」
1.学校あるいはCAMRの説明
《おまけ》CAMRでよく使う評価法Auto-estimatics
1.Auto- estimatics(オートエスティマティクス)という評価法
終わりに
《参考文献》
編集後記
CAMR研究会について
著者紹介
著書
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!



スポーツから学ぶ運動システム(その4)
従来、運動学習は人の運動システムを機械にたとえて説明されてきた。機械のように頭の中にプログラムがあり、同じ動きを繰り返し生み出していると考えられてきた。運動学習は、頭の中にプログラムを作るために同じ運動を繰り返すのである。その結果、一つのプログラムによって同じ運動が生まれ、同じ結果が生み出されると考えられた。
しかしこれは間違っているのではないか。人の運動システムは機械とはまったく異なる作動原理で動いているのではないか。まあこれがベルンシュタインの出した結論である。人の運動システムは機械とは丸っきり異なった性質を持っているし、頭の中にあるプログラムで同じ運動を生み出しているわけでもないだろう。(実際スキーマ説のように修正されたプログラム説も後に出てきた。このスキーマ説に影響を与えたのもベルンシュタインと言われている)
ではどのようにして人の運動システムは毎回異なった動きで同じ結果を生み出しているのだろうか?この説明のためにベルンシュタインは2つのアイデアを提案している。
1つは協応構造だ。筋・骨格的なレベルあるいは神経的ないくつかのレベルで、動きを制限するような協応的な構造が作られるのだ。構造的に動きはグループとして限定されるので一つ一つの細かな筋をコントロールする必要がなくなる。
たとえばスポーツでみると、初心者は体幹や四肢の動きがバラバラで協調性が見られないのに対して、上級者はその人らしい体の構え、フォームを持っている。プロ野球の打者やプロバスケットポールの選手は、自分らしく安定したフォームができるまで数え切れないほどの練習を繰り返す。
ピッチャーの投げたボールは様々な速度、コース、球種で打席に届くが、そのボールがある範囲内におさまっていれば打者はその人らしいフォームでバットスィングをするものだ。それは繰り返しの結果のフィードバックによって課題を達成するために便利なベースとして作られた協応構造があるからだ。
繰り返しの練習は、頭の中に固定的なプログラムを作るためではなく、より良い結果を生み出すための構え、ベースとしての協応構造を生み出すための過程である。職人やアスリートの一人一人はたくさんの試行錯誤の中から、自分に合った課題達成のための協応構造を発見し、作り上げるために繰り返し練習を必要とするのだ。
そして一旦できてしまった協応構造も、しばらくその課題をしなかったり、身体的・状況的な変化(体型や筋力変化、環境変化など)が生まれると良い結果は生まれにくくなる。だからイチローのように一流選手になってからも、その時、その状況に相応しいように協応構造を修正するために基礎となる素振り練習をやめないのである。やめるとその協応構造を基にした課題達成方法と実際の状況変化の間にズレが生じて良い結果を生み出せなくなるからだ。
そして実際の状況変化に応じるために必要なのが、ベルンシュタインが提案したもう一つのアイデア、「課題達成時の知覚情報の予期的利用」のスキルである。(その5に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
意欲のない人(その10 最終回)-リハビリ探偵 新畑委三郎の事件簿
携帯電話の向こうから裕美さんはいつもの勢いで話し始めた。
「娘さんから話を聞いた?ごめんなさいね、うちの先生の勘違いでね・・・娘さんと別れた後ですぐに先生のところに行って話をしたのよ。どうも先生、おかあさんを認知症の方だって思い込んでたみたいで。娘さんから薬の副作用の話を聞く前に、失禁は認知症のせいだって言っちゃったんだって。私からおかあさんの説明をしたら納得して凄く反省していたわ。早速色々調べてたわ……
でね、どうも直接失禁の原因と明確に言い切れる薬はないようよ。もちろんいろんな組み合わせもあるからなんとも言えないらしいけど。でも最近の状態を私が詳しく伝えて、不要と思える薬もあるし、少し検討して薬の内容を整理してもらえることになったわ!まだいろいろ話もあるだろうけど、またね!」
機関銃のように話しまくって電話は切れた。
どうやら薬の副作用の件は期待外れだった。少しガッカリしたが、まあ、薬も少し変更されるそうだし、これで計画した大半の状況変化の手段をやり終えたな、と安堵のため息をついた。しばらくはひたすら待つだけだ。
2週間後、おかあさんは新しいデイサービスに通い始めた。この頃、一人で過ごされるときに一度も失禁がない日が見られるようになったとのこと。以前のような状態に戻ってきたようだ。
それからまた2週間後、裕美さんと一緒にまたお家を訪ねた。室内はまったく別の部屋かと思うくらいきれいになっている。テーブル回りは基本的に配置や置いてある家具は変わっていないのにまったく別の印象だ。以前は尿臭が漂っていたが、今は臭いもしない。カーペットが同じ色調だが新しくなっている。
娘さんの旦那さんの手作りの着替え用の椅子や蓋付きゴミ箱なども使いやすそうだ。見かけも良い。
以前の手すりは壁との隙間が狭く使いにくかったが、新しく壁から大きく張り出した手すりがついていて、今ではおかあさんはそれを使って歩いたり体操をしているそうだ。この手すりも着替え用のコーナーも以前、娘さんと計画したものだ。その時は業者さんに入ってもらうと話していたが、結局旦那さんがおかあさん達と相談しながら作ったとのこと。
その娘さんの旦那さんも今日は来ていた。明るく挨拶してこられたのでこちらもできるだけ愛想良く挨拶を返す。「良い人で良かった。今回の件はお父さんの参加が大きかった」と心の中で感謝した。
娘さんが嬉しそうに話す。
「これまでは週2回2泊してたんですけど、おかあさんと相談して週2回、日帰りで来ることになったんですよ。また以前のように一人暮らしをする気力が出てきたみたいでよかったです。全部先生のおかげです」
「いえいえ、頑張られたのはあなたと旦那さんのお二人です。本当にご苦労様でした」何とか機会を捉えてお二人を労うことができたので少しホッとした。
しかし正直驚いた。旦那さんの参加や薬の変更、デイサービスにも少しずつ慣れて楽しく過ごしているという。なんだかトントン拍子にいろんなことが進んでいて、こちらが面食らってしまう。
裕美さんも俺を紹介したことで娘さんからすごく感謝されていた。どうやらこれで俺も面目を保てると思った。
娘さんと旦那さんと裕美さんで、ワイワイ賑やかに話をしている。旦那さんの部屋の模様替えの奮闘話らしい。
俺はそばで聞くともなしにこんなことを考えていた。「今回はラッキーだった。ちょっと押しただけで、幸運にもいろんな良いことが雪崩の如く起きたんだな・・・・いや、俺は今回ばかりか、いつも幸運に恵まれている。いつも何か幸運が起きて上手くやってきたな・・・・ところで今回は何が原因でこんなに上手くいったんだ?部屋替えか、新しいデイサービスか、ささやかな体操か、薬の変更か?・・・・・まあ、良い。どうせ考えてもわからない。
だがこのおかげでいつも最後はモヤモヤもする。いつも何が効果的だったかはわからない。ただ一度にたくさんのことをやってみたというだけだ。問題は解決しても、すっきりしないのは『犯人はお前だ!』という推理小説でお馴染みの結末がないからだな。皆が胸ときめかせるあの瞬間がないのだ。システム論を基にした状況変化のアプローチは、いつも最後、こんな感じになってしまう。リハビリ探偵と呼ばれても、こんな話では誰も面白がらないし、小説にはならないだろうなと思う・・・・まあ、良い。リハビリ探偵の役割は、犯人、つまり問題の原因を見つけることではなく問題そのものを解決することだからな・・・」
「ねえ、新畑さん!」と裕美さんが突然話しかけてきて、我に返った。「ああ、そうですね」と何が何だかわからないまま間抜けに答えた。「まあ、新畑さん!また人の話を聞いてなかったわね!」と裕美さんが怒ったように言う。可愛い人だ。そして俺も話の輪に加わった。(終わり)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「CAMR超入門 よく目にする光景(その4)」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
CAMR超入門 よく目にする光景(その4)2014/1/25
「根本原因にアプローチしている」という満足がある一方で、「本当にこれで良いのか?これしかないのか?」と思っていた頃にシステム論に出会いました。しかしシステム論に出会ったときの最初の印象は戸惑いでした。
システム論で言っていることを、身の回りの身近な生活経験に置き換えてみるととても当たり前のことでした。たとえば「人の歩行の形は状況に応じて変化する」と言うことです。たとえば人混みの中を急いで進むとき、人の歩行の形は一瞬一瞬に変化します。横向きになってすり抜け、歩幅やリズムを急激に変化させます。当たり前のことすぎます。こんなことは既によく知っていて、言葉にすらする必要がなかったのかもしれません。だけど改めて言葉にしてみると、とても戸惑いました。
というのも僕達は一方で「人の歩行には正しい形がある」と学校で習ってきているのです。これもまた至極普通のことと感じていました。健康な人は皆一様に似たような歩き方をします。また多少の状況変化があってもその人らしい歩き方を維持します。歩行に関して決まったの枠組みのようなものが見てとれます。だからなんとなく健常者には基準となる「正しい歩き方の姿形」があるのだと思っていました。
だから障害を持った人を見ていると、健常者の正しい歩行の形から「ずれてしまっている」と考えてしまいます。だから健常者の正しい歩行の形にできるだけ近づけようとします。もちろん障害を持った人がそれを望むから、と言うのもあります。大抵皆さん「元気な時のように普通に歩きたい」と言われるのですから。
実際片麻痺の方の分回し歩行を見ると「健常者とは違う異常な歩き方」と感じ、その方から「普通に歩きたい」と言われれば、できるだけ健常者の歩き方に近づけないか、と試みていました。たとえば「このタイミングでこの部分の筋肉が働いていない。なんとかこのタイミングでの筋の活動性をあげられないか」とかです。まあ、長い目で見ると形を治すのは上手くできませんでした。安定性や歩行速度を上げることはできるのですが。
ただそのうち、システム論の見方の方が自然に僕の中で強まってきました。次第に麻痺のある方が、健常者とは違う歩き方をするのは当たり前と思うようになってきました。だって健常者だって腰痛があれば、できるだけ痛くないように歩行の形を変えます。なぜ麻痺のある方が健常者と同じ歩き方をしないといけないのか、と。
そうすると今まで「異常」と思っていた歩行の形が実は数ある正常な歩行の中の1つに思えてきます。人というのは片麻痺になってしまうと、残った運動リソースを利用してそのような運動スキルを発達させるのだ、と。それは異常なことではなく、とても自然のことである、と思うようになってきました。(その5に続く) 文責:西尾幸敏
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「CAMR超入門 よく目にする光景(番外編)」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
CAMR超入門 よく目にする光景(番外編)2014/1/12
シリーズの途中ではありますが、早くも番外編(^^ゞ
これからシステム論の説明などに入のですが、その前に少し言っておきたいことがあります。
以前の投稿で「CAMRは第3の選択肢」と述べています。この意味は、CAMRが「対症療法的アプローチや根本的アプローチに取って代わる唯一のもの」という意味ではありません。あくまでも3つのうちの一つの選択肢であるということです。
対症療法的アプローチや根本的アプローチにたとえ問題があったとしても、それでダメだなどと言う気はありません。そんなのはむしろ当たり前なのです。どんな理論、アプローチ、考え方、技術にもそれぞれ良いところと悪いところがあります。限界があるのが当然です。もちろんCAMRもそうです。
僕は臨床家だから、臨床家の目で理論や技術の良いところを見ています。理論や技術が問題解決のための道具と考えれば、道具の使い方を考えていくわけです。たとえば穴を掘るために、柔らかい地面ならスコップ、固い地面ならまずツルハシを選択します。固い地面が掘れないからスコップはダメだ、などという気はありません。それぞれ使いどころが違っているだけです。
ただ自分がいつも臨床で選ぶ枠組みや技術が一つであれば、良いも悪いもないでしょう。一つしか知らなければ比較の対象がないからです。良いも悪いも、限界もできることも気づかないで仕事をしてしまうかもしれません。ひたすらどんな地面でもスコップを使うように・・・だから選択肢を持つことは重要なのです。(まあそれはそれでスコップ一つでいろいろな地面を掘ってしまう「スコップの達人」になるのかもしれませんが・・・(^^ゞ)
ただしシステム論を読み進めるうちに不快を感じる方がいるかもしれません。それは無理のないことなのです。子ども時代からずっと「正しい世界の見方、考え方」と学び、同僚や後輩、子どもたちにもそう言い、説得してきた自分の考えや立場、生き方を非難されているように感じるからです。
僕自身もそうでした。でもこれまでとは大きく異なる枠組みであるからこそ知る意味も大きい。
ここから先へ進むには好奇心と同時に少しばかりの勇気が必要です。それは自分の知っている世界の外側に未知の世界があることを知る勇気であり、その世界へ踏み出すための勇気です。(その3へ続く) 文責:西尾
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
意欲のない人(その4)-リハビリ探偵 新畑委三郎の事件簿
ケアマネの裕美さんは「ごめんね、『意欲を高めてくれ』なんて依頼で・・・・失禁とかもあって専門じゃないでしょう?でもこれまでもいつもなんとかしてくれたから、今回も期待してるわ!」と俺の肩をポンと叩いてくる。 「じゃあ、次の約束があるから、私行くわね。委三郎さんも忙しいんでしょう?また連絡するね」とくるりと背を向けて駐車場に向かう。弾むように歩いて行く後ろ姿を、俺はしばらく見送った。
確かに「意欲を高めて欲しい」という依頼には参る。俺はまずこれを目指すことはしない。基本、他人の意欲を意図的に高めるなんてできないからだ。自分の意欲をコントロールするのだって難しい。まあ状況変化が起きて、結果的に「意欲が高まる」ことはよくあるが、まあ、まずい依頼を受けてしまったかな・・・・しかし、率直に言って裕美さんから頼られるのは悪い気分ではない。俺にとってはまあまあ良い感じの人だ。一緒に仕事をするのはむしろ楽しみでもある。裕美さんだって俺と仕事をするのは楽しいと言ってくれる、ふふふっ・・・
でもお互いに結婚しているので、仕事以上に付き合おうとは思っていない・・・・が、もちろん裕美さんからどうしてもって言われるんなら付き合わなくもないというところだ、フフン・・・まあ、残念ながら今のところ裕美さんの方にはそういう雰囲気はない・・・おっと、妄想に走ってしまった・・・
俺は次の仕事があると言ったが、実は今日は急ぎの仕事はない。先ほどの家を辞するための言い訳だ。ゆっくりと考えをまとめるつもりだ。なにかひらめきそうなのだ。
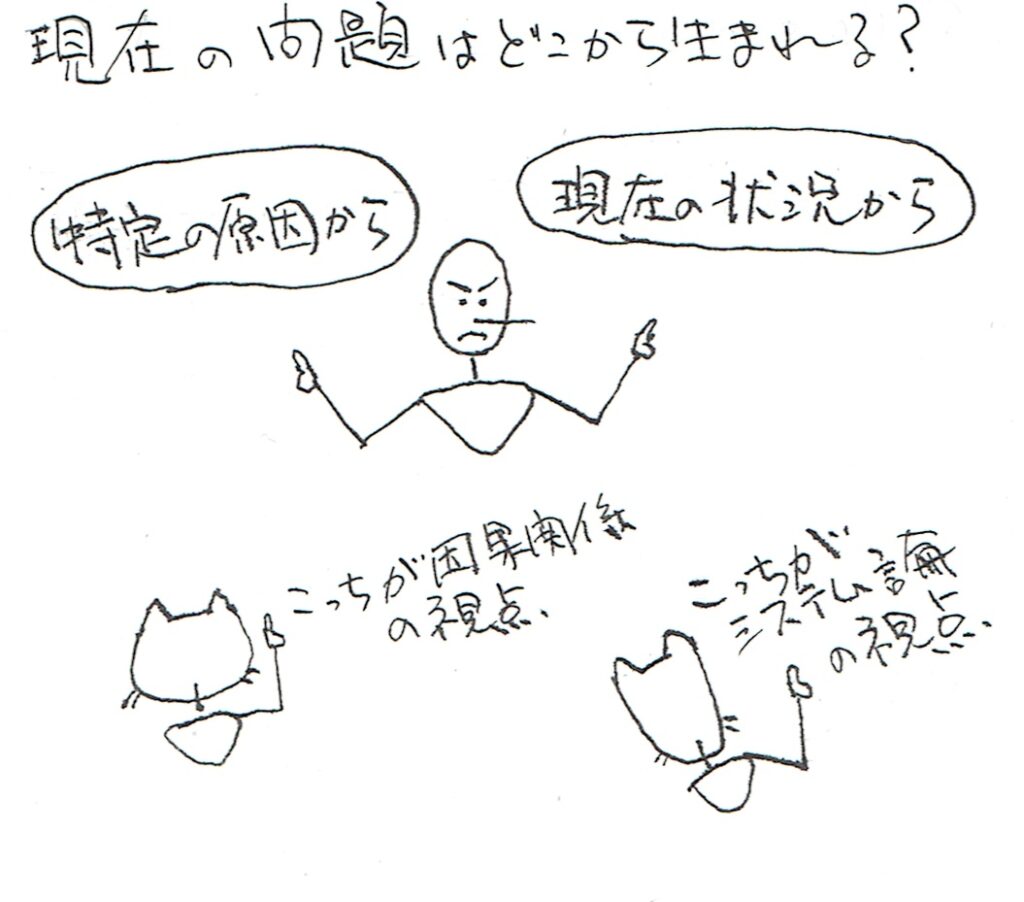
俺は問題解決に当たってはできれば二通りの方法を用意する。一つはそれらしい原因を推測して、因果の関係を想定し、その原因にアプローチする。これは原因追及型の問題解決で学校でも習うものだ。だが現実には、有力な原因が見つからないことは多いし、逆に沢山ありすぎることもある。また見つかってもどうしようもできない原因も多い。
たとえば脳卒中後に歩行不安定になる。その原因はマヒであり、マヒの原因は脳の細胞が壊れたことだ。でもリハビリでは脳の細胞を再生させたり、あるいは機能的に再生することは今のところできていない。つまり原因がわかってもどうしようもないわけだ。
だから俺はいつももう一つの状況変化型の問題解決を主に進めることにしている。
たとえば「現在の問題は現在の状況から生まれている」というふうに考えていく。つまり失禁の問題は、あの家のあの環境とおかあさんとで作られるシステムの中で生まれているのである。あの部屋とおかあさんが出会えば、いろいろな状況が生まれうるだろう。しかし水が低い方へ流れて一番低いところで溜まって落ち着くように、その状況の中で自然に「動かないで失禁」という状況に安定しているのである。やるべきことは、状況を変化させて落ち着く状態を変えることである。
こうして原因追及と状況変化の二刀流で問題解決を図るのだ。
そう言うわけで、まずは状況変化型のアプローチを考えてみる。
状況変化型のアプローチを組み立てるにはいくつかのコツがある。
まず・・・最初のコツは誰が一番問題解決に熱心かと言うことだ。この場合もちろん娘さんだ。今回の依頼人だ。この人が主たる問題解決者になる。
よく若い人から、「なぜセラピストが主たる問題解決者ではいけないのか?」と聞かれる。これに簡単に答えると、「セラピストが主たる問題解決者として振る舞うと、セラピストがいるときにしか状況変化が起きない」からである。だから主たる問題解決者は患者本人か、その家族が好ましい。
そうすると「患者や家族は消極的で何もしようとしない」と反論されるが、患者や家族は問題解決のための具体的な選択肢を持っていない場合が多いのだ。普通の患者や家族が持つ選択肢は、「病院に行って、専門家に任せる」である。自分が何か問題解決に役立つとは思いもよらないし、具体的に実生活で自分ができる有効な手段があるとは考えていないことが多い。
よく病院でセラピストが「家ではこのような運動をしてください」と言うが、これも「専門家の判断に従う」という文脈の中で動いているだけのことが多い。自分から「問題解決しよう」という積極的な態度ではないので、長続きがしないことも多い。
また専門家の意見に従った結果、「何がどうなるのか?」という具体的な目標があやふやだとやはりあまり熱心に取り組まれないことが多い。「こう頑張ったら、こうなった」という結果が見えないので、続けようという意欲が長続きしないのだ。
だから状況変化アプローチを進めるときは、主たる問題解決者を決めてその人に何を目的に、具体的に何をして、その結果どうなるのかを良く知っていただく必要がある。
さて、あともう一つ大事なことを考えなくてはならない。それは・・・(その5に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
≧(´▽`)≦
みなさん、ハローです!
CAMR入門シリーズの第五弾が出版されました!
出版を記念して以下の詳細にて無料キャンペーンを実施します。ぜひこの機会にCAMRのアイデアに触れてみください。
☆★☆★☆★★☆出版記念 無料キャンペーン★☆★☆★☆★☆
著者 : 西尾 幸敏
書名 : リハビリの限界?セラピストは何をする人?
無料キャンペーン期間: 7月21日(水)16:00~7月26日(月)15:59
☆★☆★☆★☆★☆★★☆★☆★☆★☆★☆★★☆★☆★☆★☆

【はじめに】
この本はCAMRのFacebook pageに掲載された「リハビリの限界?どうしても良くならない」(2020年1月7日~2020年2月4日の計5回)を大幅に加筆・修正したものと「セラピストは何をする人?」(2021年3月16日~2021年4月13日の計5回)を合わせたものです。
この二本を組み合わせた意図は、本書の編集責任者でありCAMR研究会副代表の田上氏が編集後記に述べています。
僕は若い頃から、リハビリの場面ではいろんな考えに惑わされてきました。
代表的な考え方は「セラピストが諦めたらダメだ!諦めずに頑張ったらいつか目標が達成できる。それが私たちの仕事で大事!」という信念めいた考え方でしょうか。いや、確かにその通りなので反論のしようがありません。でもこれが達成不可能な目標、たとえば「リハビリで麻痺を治す」とか「この患者さんが家で絶対に倒れないようにする」などに向けられると大変です。
患者さんとセラピストが一緒になって「麻痺を治す」という目標を持ってしまうと、延々と停滞の状態、つまり変化のない状態でのリハビリとなってしまいます。現状、麻痺はリハビリでは治らないからです。そして人生の目標はリハビリをやり続けることというリハビリ漬けみたいな人生になるかもしれません。
また、もしまったく転倒させないことを目標にするなら、筋力強化よりは立ったり歩いたりしないことかもしれません。歩く限り転倒の可能性はついてまわるからです。
この「何があっても理想を実現するまでは諦めない」という姿勢はユートピアン・シンドロームと呼ばれます。達成不可能な夢を追い続けるという行為で、むしろ「理想を諦めないで努力し続ける」ということ自体が目的となっています。そのために患者さんの運動問題を解決するのではなく、むしろ運動問題をずっと維持し続けるという結果を引き起こします。
もう一つの代表的な考え方は、「リハビリの業務は、運動能力を改善すること」というものです。「リハビリで扱う運動問題は、運動能力の低下による問題であり、これに対処するにはリハビリで運動能力を改善することである」とも言えます。もっと明確に表すと「リハビリの主目的は運動能力の改善」と信じることです。もちろんこの考えはここまで明確な形をとらないことが多いのです。「身体ばかりでなく、全人間的に見るのがリハビリ」と言われたりするからです。でもこれは私たちの考えの背景にずっしりと居座っています。
これは私たちが学校で習う、要素還元論を基にした「原因解決の方法論」に起源があるように思います。私たちは問題が起きると、その原因を探りその原因にアプローチして問題解決を図るように習ってきました。多くの場合身体に原因があるので、どうしても身体をどうにかしようとするのですね。
これは脳性運動障害では、「麻痺は脳細胞が壊れたことが原因であるから、壊れた脳細胞を再生させる、あるいは機能的に再生させる」として「麻痺を治そう」、あるいは「障害を治そう」というユートピアン・ドリームにも繋がっています。
また転倒しやすいのは、「筋力低下やバランス能力の低下にある」としてやはり身体能力の改善に徹底的にこだわったりする傾向を生み出します。転倒の原因は単純に筋力低下やバランス能力低下などの単純・素朴な因果関係で説明できるものばかりではありません。環境や性格や認知など様々な要素の相互作用と考えるべきでしょう。しかし運動能力だけに焦点を当ててそればかりをやってしまいがちな傾向を生み出すのです。
これらの「ユートピアン・シンドローム」や「運動問題の改善には運動能力の改善をすること」は私たちの思考の背景に居座っていて、表面的に正論ぽくて、すぐに否定が難しいのでやっかいです。ここではこれらの代わりの考え方を提案しています。ユートピアン・ドリームの代わりに「比較的短期間で達成可能な目標」です。私たちが対象とする問題は「運動問題」ではなく「生活問題」です。「障害を治して運動問題を解決する」のではなく「状況を変化させて生活問題の改善を目標とする」です。「原因を追及して原因にアプローチする」代わりに「状況を変化させるアプローチ」を提案してします。
実は僕自身がユートピアン・ドリームに囚われたり、身体能力の改善だけに焦点を当てたりしていた時期もあります。これらの考え方に囚われると、目の前の患者さんの全体像が把握できなくなって問題解決が遅れたり、できなくなったりすることがありました。
たとえば目の前の患者さんの抱える問題より、将来の麻痺の治った状態を夢見たりするわけです。結果、環境を少し調整すれば消えてしまうような生活問題も、ずっと身体能力の改善(麻痺を治す)を通して解決しようとして停滞の状態に陥ってしまうのです。「今、我慢して頑張れば将来はきっと素敵な人生が待っている」と患者さんや家族に過剰な努力を強いたりしてしまうのです。現実的に、そして持続的にも達成可能な目標ではないのですね。
まあ、これらの反省を基にこのCAMRというアプローチは発展してきたのです。
内容的にはまだ不十分ですが、現状に満足していないセラピストには一つの大きなヒントになるのではないだろうかと考えています。
2021年7月初旬 年々強くなる雨に恐れを抱きながら
西尾幸敏
【編集後記】
本書はCAMR入門シリーズの第五弾となります。いかがだったでしょうか?
今回はセラピストとしての在り方をテーマとした二部構成になっています。第一部は、困難事例だからといってすぐに諦めたりせず、なおかつ夢見るユートピアンにもならずにすむ現実的な方法論、状況変化アプローチが紹介されています。
通常養成校で習うのは、要素還元論に基づく原因解決アプローチです。これも優れた方法論の一つではありますが、原因を特定できない場合や、原因はわかっても対処不能な場合などには無力になってしまいます。そんな時に他の方法論を知らなければ、行き詰まって問題解決を諦めてしまうか、ユートピアンとなって効果のほどもわからないまま漫然と同じプログラムを繰り返すことにもなりかねません。
たった一つの方法論しか知らないセラピストと、二つの方法論を状況に応じて使い分けることが出来るセラピストがいるとしたら、あなたはプロのセラピストとしてどちらが好ましいと思いますか?あるいは、もしあなたがクライエントだったとしたら、どちらのセラピストに担当してもらいたいと思いますか?ぜひ考えてみてください。
そして、ここでは運動システムによる問題解決の一つである「安心確保方略」をとる症例が取り上げられ、臨床像やアプローチの例が紹介されています。訓練場面でのパフォーマンスが生活場面でのパフォーマンスに反映されにくいケースというのは、みなさんも経験されたことがあると思います。昔から「“できるADL”と“しているADL”の違い」といったテーマでも取り上げられています。“できるADL”と“しているADL”ではそもそも課題が異なっているので違っていて当然という面もあるのですが、それとは別に、こういったケースの中には「安心確保方略」をとっているものもいくつか含まれているのかもしれません。今ならそれを見抜き、ケースごとにもっと適切な対応が出来ると思うのですが・・・、自身の過去を振り返ると反省しきりです(;^_^A
第二部では、著者の経験を振り返りながらセラピストとしての在り方を考察しています。時代背景的にもちょっとしたリハビリの歴史を概観しているかのようです。ここではセラピストの役割に焦点を当てつつ、著者の現時点での結論が述べられています。クライエントへのリスペクトやプロのセラピストとしての矜持が感じられ、個人的にはとても共感できるものでした。みなさんはどう思われたでしょうか?
CAMR入門シリーズにしては少し重めの内容だったかもしれませんが、その分読み応えがあったのではないかと思います。本書をCAMR入門シリーズのラインナップに加えることができて嬉しく思います。本書が少しでもみなさんのお役に立てることを願っています。最後まで目を通していただき、ありがとうございます。
2021年7月 ビールが美味しくなってきた今日この頃
CAMR研究会副代表 田上 幸生
【目次】
CAMR入門シリーズ⑤ リハビリの限界? セラピストは何をする人?
はじめに
目次
第一部 リハビリの限界?どうしても良くならない!
第1章 安心確保方略をとる片麻痺患者
1.症例紹介
2.順調な改善、かと思いきや・・・
3.「安心確保方略」の正体
4.通常のアプローチは・・・
第2章 リハビリの限界?
1.リハビリの限界と個人の限界
2.リハビリの限界とは?
3.生活課題達成上の運動問題に着目する
第3章 状況変化アプローチ
1.問題解決を見てみよう
2.「安心確保方略」が見られる場合はどうするか?
3.結果は・・・
4.考察
第4章 失禁のある症例への状況変化アプローチ
1.症例紹介
2.現実的な問題解決のための目標と治療方略を考える
3.できることは何でもやる
4.結果
5.状況変化アプローチの手法とは
第二部 セラピストは何をする人?
第5章 従来的なパラダイムへの疑問
1.セラピストは運動のやり方を教える人?
2.おじいちゃんの一喝
3.ボバース全盛時代
4.湧き上がる疑問
5.人間機械論
第6章 システム論との出会い
1.上田先生との出会い
2.アメリカ留学中に見た課題主導型アプローチ
3.課題主導型アプローチへの疑問
4.自分の経験や考えをまとめてみる
5.現場復帰 ~CAMRの胎動
第7章 脇役としてのセラピスト像
1.セラピストは何をする人?
2.集え!Young CAMRer!
編集後記
CAMR研究会について
著者紹介
著書

【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
≧(´▽`)≦
みなさん、ハローです!
運動システムにダイブ!シリーズの第一弾が出版されました!
西尾 幸敏 田上 幸生 著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
出版を記念して以下の詳細にて無料キャンペーンを実施します。ぜひこの機会にCAMRのアイデアに触れてみください。
☆★☆★☆★★☆出版記念 無料キャンペーン★☆★☆★☆★☆
著者 : 西尾 幸敏、田上 幸生
書名 : 脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密
無料キャンペーン期間: 6月30日(水)16:00~7月4日(日)15:59
☆★☆★☆★☆★☆★★☆★☆★☆★☆★☆★★☆★☆★☆★☆

【はじめに】
この本はCAMRのFacebook pageに掲載された「5分でわかるシステム論」(2019年10月15日~2019年11月19日の計6回)を大幅に加筆・修正したものです。むしろ加筆・修正が大幅すぎて、まったくのオリジナルと言った方が良いでしょう。
思えば昔、僕が脳卒中患者さんを見始めたときには、「どうしたら良いものか」と悩んだものです。
たとえば患者さんが立った時に、麻痺側の下肢が全体に屈曲して持ち上がり、患者さんは良い方の手脚だけで立たれます。これは「屈曲共同運動という現象であり、抑制されなければならない」と講習会などで説明されます。そこで自分の手を使って、患者さんの脚を抑えてまっすぐにし、床につけようとするのですが、一向に改善した感じがないのです。「手を使って、脚をまっすぐにして体重を支えるようにする」ことが正しいのかどうかさえ、分からないまま実施していました。
これはそもそも「屈曲共同運動」が何者で、どんな性質や意味があるか分からないので、形だけ真似て脚をまっすぐにしようとするからです。
一方、システム論を基にしたCAMR(カムルと呼びます。Contextual Approach for Medical Rehabilitation: 医療的リハビリテーションのための状況的アプローチの短縮形です)では、この現象を次のように説明していきます。
麻痺側下肢を発症後初期に使おうとすると、麻痺のため支持性がなくてこけそうになります。つまり麻痺側下肢を使おうとすると立つという課題達成に失敗するのです。そこで患者さんの運動システムは立位課題に失敗しないように患側下肢を使わずに、健側上下肢と手すりを使って立とうとします。つまりこれは運動システムが選んだ患側下肢の「不使用」という問題解決方法なのです。
しかし障害後に運動システムが選んだ問題解決方法は、たくさんの筋力などのリソース(資源)が失われて、仕方なく応急的に使われる解決方法です。「使うと失敗するので使わない」という問題解決方法は、その時は良くても、「使っていれば将来的には使えるようになるはずの麻痺側下肢」の可能性を失わせてしまいます。
このように理解すると、単に脚の形をまっすぐにしようというのではなく、形はどうあれ、まずはできるだけ使ってもらうことが大事であることがわかってきます。
そして運動システムが障害後に立つために選んだ問題解決なのです。「屈曲共同運動」というと、中枢神経システムの中の正体不明のメカニズムが相手でどうしたら良いのか分からなくなりますが、運動システムが選んだ問題解決なら、もう一度運動システムに「使う」ように選び直してもらえば良いのです。
単に脚の形を矯正するのではなく、患側下肢に重心を移動してもらい、ちゃんと荷重・支持する経験を繰り返し、運動システムに「この脚は繰り返し使っていると、支持性が増して使えるようになるよ」という知覚学習をしてもらえば良いのです。
このようにシステム論のような従来と異なった解釈の立場に立って理解すると、リハビリテーションのアプローチを自分で考え出したりすることもできるようになります。そうすると自分が何をするべきかがよく分かって、リハビリという仕事もとても面白くなります。
この本ではシステム論を基にしたCAMRの考え方を紹介しています。このCAMRは、「運動システムの視点に立つ」という独自の方法論を持っています。つまり運動システムにダイブ(飛び込む)して、運動システムの立場から人の運動システムの振る舞いを理解しようという視点です。難しそうに思われるかもしれませんが、実際にやってみるととても簡単です。
今の仕事の内容ややり方、結果に満足していないなら、この本を通じてきっと新たな可能性を見つけられると確信しています。
2021年6月 最初の発刊に寄せて
西尾幸敏 田上幸生
【目次】
運動システムにダイブ!シリーズ① 脳卒中片麻痺の運動システムにダイブせよ! ~CAMR誕生の秘密~
はじめに
目次
第一部 運動システムの立場に立ってみましょう!
第1章 異なる立場、異なる理解
1.自分の立場を知る
2.学校教育の立場
3.システム論の立場
4.システム論の立場で見る例
5.要素還元論とシステム論
6.異なる立場の視点を自由に行き来する
第2章 システム論の視点を身につける方法論
1.運動システムの作動の性質を理解する
2.運動システムにダイブし、内部から観察してみる
第3章 健康な若者の運動システムにダイブ!
1.お腹が空いた場面
2.内部からの観察
3.嫌いな父親と一緒にいる場面
4.内部からの観察
5.運動システムの作動の性質(①、②)
第4章 廃用症候群のご老人の運動システムにダイブ!
1.水を飲みたい場面
2.内部からの観察
3.運動システムの作動の性質(③、④、⑤)
4.行動範囲が広がっていく場面
5.運動システムの作動の性質(⑥、⑦、⑧)
第5章 あなた自身の運動システムにダイブ!
1.歩いている場面
2.運動システムの作動の性質(⑨)
3.運動システムの作動の性質のまとめ
第二部 脳卒中片麻痺の運動システムにダイブ!
第二部へ進むにあたって
第6章 救急外来に運び込まれた場面
1.外部からの観察
2.運動システムの視点
3.Camrer's Note
第7章 初回セッションの場面
1.外部からの観察
2.運動システムの視点
3.Camrer's Note
第8章 初めての座位訓練の場面
1.外部からの観察
2.運動システムの視点
3.Camrer's Note
第9章 2回目の座位訓練の場面
1.外部からの観察
2.運動システムの視点
3.Camrer's Note
第10章 初めての起立練習の場面
1.外部からの観察
2.運動システムの視点
3.Camrer's Note
第11章 その後の立位練習の場面(その1)
1.外部からの観察
2.運動システムの視点
3.Camrer's Note
第12章 その後の立位練習の場面(その2)
1.外部からの観察
2.運動システムの視点
3.Camrer's Note
ちょっと一服・・・《CAMRにとっての理論とは?》
第13章 初めての歩行練習の場面
1.外部からの観察
2.運動システムの視点
3.Camrer's Note
参考までに・・・《スベラースの紹介》
最後に
CAMR研究会について
著者紹介
CAMRの本
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
セラピストは何をする人?(その3)
システム論を教えてくれたのは、上田法の上田先生だ。直接会うとハチャメチャなことを言ったりされるが、一方で文章はどれを読んでも実にしっかりと考え込まれている。型破りで魅力的な人だった。
それから時間はかかったが少しずつシステム論の勉強を進める。まず人の運動システムは、構造も作動も機械とはまるっきり異なっているということがわかる。人の体はプログラムの様なものではコントロールできない、しているはずがない。そして健常者相手でも運動の方法を他人が教えることはできないらしい。世間でセラピストが運動の方法と思って指導しているのは実は課題の提示である、なぜなら誰も運動の方法は教えられない。また同じように見えても運動方法は各人各様で同じではない。さらに一時的な変化と持続的な変化は違う。運動発達における脳の階層説や成熟説も間違いではないか、エトセトラ、エトセトラ・・・
まるで今まで習ってきたことと概ね反対のことばかりではないか!
ではどうすれば良いのか?アメリカではシステム論を基にした「課題主導型アプローチ」なるものが生まれていると上田先生から教えてもらう。その頃母校の教官になった僕は、幸い厚生省の海外留学の制度を使ってシカゴのイリノイ大学に1年間留学させて貰うことになった。
だが実際留学はしてみたものの、英会話の理解力が乏しい僕は、現場でますます混乱してしまう。
現場で見せて貰った課題主導型アプローチは「なーんだ、こんなものか」というくらいある意味、シンプルだった。セラピストは運動課題を指示して、座って見ているだけ。患者さんだけが一人で一生懸命運動している。特に要素的な改善(筋力や可動域の改善など)を目指す訓練はまるっきり行われていなかった。(1991年当時。この当時特にハンド・セラピーは科学的根拠がないと非難されていた。現在の様子は知らない)
セラピストは患者の状態を調べ、必要な課題を考え、話し合い、それを指示する。そして運動の状況を見て次の適切な課題と実施条件を考え、指示する。他人が感覚入力するのではなく、自ら必要な運動課題を実践して必要な知覚学習を進めるという理屈だ。課題達成のために必要な知覚学習は、その課題を通してしか得られないからだ。(知覚学習は従来言ってきた運動の感覚学習とは全く異なる。ギブソンらの言う知覚システムではモダリティ毎に感覚を分けたりしないし、いや、そもそも従来の感覚の考え方とは根本的に異なる)
「人の運動システムの作動の性質に精通し、それを基に提案する課題を通して、そこでしか得られない知覚学習をして課題達成の能力が改善する」ということだ。確かにその通りだと思う。が、何かしっくりとこない。理屈はそうなんだけどな・・・・ そのうちに気がついた。日本では「他人の体を他動的に動かして感覚入力をしているセラピスト」に人の体を機械のように扱う冷たさを感じた。しかしアメリカでは、セラピストが見ているのは運動システムとその性質であり、自ら能動的に動いて課題達成の知覚学習を進める患者の変化を客観的に観察・コントロールしようとする科学者のような姿だった。(その4に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
≧(´▽`)≦
みなさん、ハローです!
「システム論の話をしましょう!」「治療方略について考える」に続いて、CAMR入門シリーズの第三弾が出版されました!
西尾 幸敏(著)「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
本書はCAMR入門シリーズの第三弾となります。今回は「ピリッ」とスパイスのきいた内容です。
本書では「正しさ幻想」として、セラピストが比較的陥りやすい盲点を指摘しています。具体的には二つ挙げており、一つは「正常運動」とも呼ばれる、健康な若い人が実験室の中という普段の生活ではあり得ないような特殊な状況で行なった運動を「正しい運動」としてモデルにすることについて、そしてもう一つは、脳卒中治療ガイドラインなどに代表されるような、EBMを背景にしたプログラム選択の指針について言及しています。
どちらも適切に用いればとても有益なのですが、動作分析に際しては運動の形の奥にあるものへの眼差しの必要性を指摘し、プログラム選択にあたってはしっかりと状況を見て自ら考えることの大切さを訴え、いずれの場合にもただ頭から盲信してしまうことへの注意を呼び掛けています。
僕は人一倍思い込みが強く頑固な方なので、このあたりのことには本当に苦労した記憶があります。読者のみなさまにおかれましても、盲信の罠にはまっていないか、ぜひ一度自らの臨床を省みる時間を持っていただきたいと思います。
Camrer(カムラー:CAMRを実践する人)の一人として特に興味深かったのは、第3章から第4章にかけて、具体的な症例を挙げて説明している部分です。
なかでも、脳血管障害後の筋緊張の亢進を患者さんによる「問題解決」と捉えているところは、CAMRの真骨頂といっても過言ではないでしょう。なぜなら、脳血管障害後の筋緊張の亢進は通常「症状」と捉えられているからです。そのような常識を前にしながら「問題解決」と捉えることは、理論を道具と考え、システムを内部から観察するCAMRの視点をもって初めて可能になります。
(CAMRの視点をもう少し詳しく知りたい方は、CAMRの基本テキスト西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版をご参照ください)

目次
CAMR入門シリーズ③ 正しさ幻想をぶっ飛ばせ! ~運動と状況性~
この本について
目次
第1章 「たった一つの正しさ」を追い求める社会病理
1.巷にあふれ返る「正しさ幻想」
2.正しい歩き方? ~セラピストが出会う「正しさ幻想」
3.運動は真空中で起きているのではない
第2章 運動と状況性
1.患者さんからの怒号を浴びて
2.状況の中での運動
3.健常者の歩行の特徴は、形ではなくその作動にある
4.前節の補足説明 ~疑問の声にお応えして
第3章 「正しさ幻想」が招いた悲劇
1.正しいアプローチ?
2.症例紹介
3.ガイドラインに沿ったプログラムではあるが・・・
4.いろいろなところに潜んでいる盲信の罠
第4章 CAMRの視点
1.運動システムの作動原理
2.症状か?問題解決か?
3.問題解決方略を見抜け!
4.多要素多部位同時治療方略
5.理論は道具、状況に応じて使い分ければ良い
6.正しさ幻想をぶっ飛ばせ!
編集後記
CAMR研究会について
著者紹介
著書
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!













