意欲のない人(その9)-リハビリ探偵 新畑委三郎の事件簿
翌日、娘さんに電話を入れた。
「新畑さん、色々教えてくださって本当にありがとうございました!」声が弾んでいる。
昨晩裕美さんから聞いていた内容だったが、一通り聞いた。
「何度もありがとうございました」といわれる。
その後やっと内科受診の結果を聞くことができた。
「それがダメだったんですよ」と答える。彼女の声は沈んでしまった。
「母の失禁の話をしたら、『それは歳だから仕方ないです。認知症があるのでこれからもずっと続くでしょう』って言われてしまって」
「ああ、それはひどい。おかあさん、認知症なさそうですもんね。これまで見てもらっていた先生なんですか?もし良ければ、他の内科なりを受診してみたらどうでしょうか?」と提案してみる。
「それがずっと診ていただいている先生で。良い先生なんですよ、母も信頼していて・・・だから先生を変えるというのはちょっと・・・それにケアマネさんもその病院からきておられるんです・・・・ケアマネさんもとても良い人で頼りになるんです。だから病院を替えるのは良くない気がして」
やれやれ、やはりこんなことになってしまう。原因を探してその原因にアプローチしようとしても現実にはなかなかうまく運ばない。特に俺のように飛び込みで馴染みのない地域や施設で仕事をすると、元々の人間関係ができていないのでこの手の「連携の壁」がいつも問題になる。
俺は元々人付き合いが苦手だ。初対面ではあまり話ができないし、仕事上の関係を作るにしてもかなり時間をかけないと話ができない。見ず知らずのところへ飛び込んで話をする関係を作るなんて考えただけで億劫になる。
こんな行動力のない人間が、問題解決の依頼を受けるなんて仕事をしていることが不思議である。まあ、望んだわけではなく成り行きでこうなってしまったのだ。
娘さんが続ける。
「それでも、ここまでで少しずつ母に変化が出てるんです。今日も私が言わなくても自分から2回トイレに行きました。でもどうしても半分くらいは漏れちゃうみたいで。でも先生に言われたようにそれについてはうるさく言わないで、トイレに行ったこと自体を喜ぶようにしています」声に元気が出る。
「ええ、そうですね・・・」と答えたものの後の言葉が続かない。次はどうすれば良いのか?
「ええと・・・裕美さん、あ、ケアマネさんですけど、彼女には受診の結果、もう話されたんですか?」
「ええ、受診が終わってすぐにとなりの事務所で会いましたので」
そうか、もう話したのか・・・確か、以前、裕美さんが「うちの先生、本当に良い人だし、熱心なんだけど、頭がちょっと硬くて困ったりするのよね」なんて愚痴っていたのを思い出す。
その後、
「今は状況変化がうまくいっているのでこのまま続けてください、また1週間後に連絡します。困ったときはいつでも連絡してくださいね」と話して電話を切った。
さて、困った!・・・困った!まずは裕美さんに相談すれば良いのだが、問題が裕美さんの雇い主となれば・・・・
それともいっそのこと、第二プランの精神科受診を勧めてみるか?もしかしたらその先生が物わかりが良くて、薬の検討をしてくれるかも・・・・などと考えてみる。どうも俺は自分に都合良く考える癖がある。こんなことだからよく失敗してしまうのだ。
行動力もないし、コミュニケーションの能力も低いし、判断力も良くないし決断力もないし、人付き合いも良くない。なんでこんなことをやってるんだろう、とつくづく思う・・・・まあ、引き受けたんだから仕方ない。
おかあさんの振る舞いの変化は起きているが、失禁に伴う生活問題の改善は少々だ。これが現在の状況だ。内科の主治医が問題だが、裕美さんの雇い主である。やはり精神科の受診を勧めてみるのが一番楽な状況変化の方向性か?それとも・・・・・・ 俺はしばらく考え込んだが、結局ケアマネの由美さんに電話して、とりあえず相談してみることにした。できれば医師を説得してくれるようお願いもしたい。裕美さんに余計なお願いをするのは気がひけるが仕方ない。スマートフォンを手にした途端、着信音が大きく鳴ったのでびっくりした。画面を見ると裕美さんからだ・・・(その10に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!



≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「CAMR超入門 よく目にする光景(その4)」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
CAMR超入門 よく目にする光景(その4)2014/1/25
「根本原因にアプローチしている」という満足がある一方で、「本当にこれで良いのか?これしかないのか?」と思っていた頃にシステム論に出会いました。しかしシステム論に出会ったときの最初の印象は戸惑いでした。
システム論で言っていることを、身の回りの身近な生活経験に置き換えてみるととても当たり前のことでした。たとえば「人の歩行の形は状況に応じて変化する」と言うことです。たとえば人混みの中を急いで進むとき、人の歩行の形は一瞬一瞬に変化します。横向きになってすり抜け、歩幅やリズムを急激に変化させます。当たり前のことすぎます。こんなことは既によく知っていて、言葉にすらする必要がなかったのかもしれません。だけど改めて言葉にしてみると、とても戸惑いました。
というのも僕達は一方で「人の歩行には正しい形がある」と学校で習ってきているのです。これもまた至極普通のことと感じていました。健康な人は皆一様に似たような歩き方をします。また多少の状況変化があってもその人らしい歩き方を維持します。歩行に関して決まったの枠組みのようなものが見てとれます。だからなんとなく健常者には基準となる「正しい歩き方の姿形」があるのだと思っていました。
だから障害を持った人を見ていると、健常者の正しい歩行の形から「ずれてしまっている」と考えてしまいます。だから健常者の正しい歩行の形にできるだけ近づけようとします。もちろん障害を持った人がそれを望むから、と言うのもあります。大抵皆さん「元気な時のように普通に歩きたい」と言われるのですから。
実際片麻痺の方の分回し歩行を見ると「健常者とは違う異常な歩き方」と感じ、その方から「普通に歩きたい」と言われれば、できるだけ健常者の歩き方に近づけないか、と試みていました。たとえば「このタイミングでこの部分の筋肉が働いていない。なんとかこのタイミングでの筋の活動性をあげられないか」とかです。まあ、長い目で見ると形を治すのは上手くできませんでした。安定性や歩行速度を上げることはできるのですが。
ただそのうち、システム論の見方の方が自然に僕の中で強まってきました。次第に麻痺のある方が、健常者とは違う歩き方をするのは当たり前と思うようになってきました。だって健常者だって腰痛があれば、できるだけ痛くないように歩行の形を変えます。なぜ麻痺のある方が健常者と同じ歩き方をしないといけないのか、と。
そうすると今まで「異常」と思っていた歩行の形が実は数ある正常な歩行の中の1つに思えてきます。人というのは片麻痺になってしまうと、残った運動リソースを利用してそのような運動スキルを発達させるのだ、と。それは異常なことではなく、とても自然のことである、と思うようになってきました。(その5に続く) 文責:西尾幸敏
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
意欲のない人(その8)-リハビリ探偵 新畑委三郎の事件簿
5日後にケアマネの裕美さんから電話があった。
「委三郎さん、やったわね。娘さんから電話があって大変喜んでおられたわよ!」
「ええっ!、失禁が治った?」
「ううん、まだよ。でもね、大きな変化があったのよ。まずね、娘さんのご主人さん、今年退職して、家にいるんだけど、いろんなお手伝いをしてくれるようになったんですって」
内心、「なんだ」と思った。
「娘さん、それが嬉しかったらしくって。元々ご主人さんは奥さんがおかあさんの介護に苦労していたので、なんとか助けになりたかったらしいの。でもおしっこの世話が主でしょう。ご主人は手が出せないから、奥さんの愚痴を聞くだけだったらしいの。でも委三郎さんが部屋の模様替えを提案したでしょう。だからそれなら自分もできるってね、積極的に奥さんを手伝ってくれるようになったんだって。でね、ご主人さん、日曜大工が趣味で、いろいろゴミ入れを工夫して作ってくれたり、オムツ替えの椅子を工夫してくれたり、いろいろなものの収納をやってくれたり、家の壊れた場所を修繕したりしてくれたんだって。この五日間、毎日通ってほとんど1人で部屋をきれいにしてくれたんだって。
私も今日行ってみたんだけど、見違えるほどきれいになって明るくなってるのよ。びっくりしちゃった!同じ部屋とは思えないくらい。
でね、娘さんもすごく喜んでて、主人がこんなに一生懸命やってくれるなんて思ってもいなかった、先生に相談して本当に良かった、ですって。これまでは自分一人で介護を背負って、主人にも迷惑かけていかないといけないってすごく気持ちが重かったのが吹っ飛んだんですって!」
「ああ、なるほど・・・・」 そういうことかと納得した。状況を変化させると、思いもよらない結果が、良いことも悪いことも含めて起こるものだ。普通悪い結果が起きたり、変化が起きないときにはすぐに状況変化の対象ややり方を変えて対処する。今回のように良いことが起きたらむしろそれを続ける。
実は前回娘さんと別れた後に、もし状況が悪くなった場合に、他にどのような状況変化のやり方があるかを色々考えていたのだが、あまり良い手は思いついていないので助かった。
「それにね、おかあさん、ここ二日間は日中に2回くらい、娘さんが軽く促すだけでトイレに行かれるようになったらしいのよ。それもすごく喜んでたわよ。以前は口うるさく言って最後は喧嘩をしてたらしいんだけど、やはり環境が変わると気分が変わるみたい。
でもおしっこの失敗は減ったけど、まだ続いているみたい。後もう少しで漏れたり、いつのまにか漏れてるって事があるみたいね。
あと、この間相談したデイサービスの転所の件だけど、今日、娘さんとおかあさんと私で見学に行ってきたの。私の知っている中で一番元気で明るい雰囲気のところ。おかあさんも娘さんも気に入られたみたいよ。早ければ来月から利用開始よ。あと10日間くらいね。いろいろ状況が変わっておかあさんも大変そうだけどね。でも娘さんは旦那さんとの件も上手くいってとても張り切っておられるわよ。明日内科を受診するんだって。上手くいくと良いわね。まずはご報告まで。さすが、リハビリ探偵さんね!この先が楽しみ!じゃーねっ!」
といって電話は切れた。
いろいろと状況変化は起き始めているらしい。しかし旦那さんの件は意外だった。ただ今回は上手くいったが・・もし、旦那さんが「介護量を増やして妻に無理をさせている」なんて騒ぎになったら大変だったな、と思う。少し冷や汗が出る。
これまでは主に施設や病院を中心に状況変化アプローチをすることが多かったので、問題解決者以外の家族がこんなに積極的に参加してくることもなかった。やはり家庭を舞台にする場合は、もっと慎重に進めるべきだと思った。今回は一度に多くを詰め込みすぎたと後から反省はしていた。
そして「明日がいよいよ受診か!」と思う。これが今回の状況変化では大きな影響を持つはずだ。柄でもないが思わず手を合わせて祈る仕草をした。「どうか上手くいきますように!」思わず声が出て、急に恥ずかしくなった。(その9に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「CAMR超入門 よく目にする光景(その3)」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
CAMR超入門 よく目にする光景(その3)2014/1/18
若き日の僕は、「やはり根本的アプローチだよね!」と自然に思いました。だって小さな頃からテレビを見ていると、何か事件がある度に必ず専門家が出演し、「今回の事件の原因は・・」などと解説します。ドラマでもなにか事故が起きると「あわてるな!まず何が原因かを探ることが先決だ!」などと主人公が格好良く指示したりします。社会全体で何か起きる度にまず原因を探ることが先決だ、と考える流れが自然にできているのだと思います。
「何か問題が起きた→まず原因を探る→その原因にアプローチする」という流れです。そして原因探求が根本原因に近付くほど根本的解決が導かれると考えます。これを「原因探求志向」と呼びましょう。原因をまず探せば解決法も見つかると考えます。僕達が馴染んでいる医学はこの傾向が強く、そして実際に効果的なアプローチです。
しかし現実にはこのアプローチが有効でない場合も結構沢山あります。人の運動もそうです。ここでは人の運動は「様々な構成要素の相互作用から生まれるから」とよく言われる理由だけ述べておきます。このような多要素が影響し合って生じる現象というものは、たとえ原因を見つけても達成不可能な目標や解決不能の状況に陥ることも多いのです。
たとえばイジメの原因は様々なレベルで原因が求められます。社会の構造から生じる歪みとかイジメ側の家族に問題があるとか虐められる側の子の性格に問題があるとか、いろいろです。でも性格や家族の有り様を変えるなんて誰ができるんでしょう。イジメのない社会を作るなんて絵に描いた餅じゃないでしょうか?
結局イジメをなくすのではなく、イジメに対する学校の対応に問題があったとして教育現場の改善を行ったりします。そしてマスコミもそこに焦点を当てます。そう、誰もがイジメ自体をなくすことは不可能に近いと思っているのです。原因を探ったところで解決不能だと思っているのです。
これはリハビリの現場でも同じで、原因を探ったからといって問題解決にはつながらない。たとえば僕が若い頃には以下のような考えが流行でした。「脳性運動障害は、脳細胞が壊れて脳の機能が失われたのが原因。だから使われていない脳の部分、あるいは脳細胞の再生などを利用して、健常者の運動をモデルとして繰り返し学習する。そして健常者の運動を患者自身で再現する」とする考え方が根本的アプローチと考えられていました。確かに健常者の運動が再現できると言うことは、「麻痺がなくなる」と言うことでもあります。
しかしこれは結局達成不可能な目標でした。60年以上「麻痺が治った」という話は聞いたことがありません。
それどころか新たな問題が生じました。あるセラピスト達は自分の能力が足りないからと自分を責めます。また他のセラピスト達は家族や他のスタッフが協力してくれないからと他人を責めます。患者様は「間違えた運動を憶える」という理由で歩くことを禁じられたことさえあります。
皆「アプローチが間違っている」とか「達成不可能な目標である」とは考えていないようでした。まあ、他の選択肢がなかったと言うこともあるのでしょう。また正面から、これを「解決不可能な目標」と明言してしまうこと自体、敗北と感じてしまうのでしょう。だからこれは皆口に出さない。テレビのニュースで「イジメをなくすことは不可能です」と明言しないのと一緒です。
でもこれは敗北ではありません。もともとどんな理論にも限界があるのです。科学が万能だとか社会は必ず幸福だけの世界に進化するとか、諦めなければ夢が叶うなどの考えが幻想に過ぎないのですから。夢を夢見て現実を否定するなんて馬鹿げた話です。(その4に続く) 文責:西尾幸敏
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
意欲のない人(その7)-リハビリ探偵 新畑委三郎の事件簿
俺は話を続けた。
「あと、今は週2回こちらに来られて、計4日間はおられるんですよね」
「ええ、月曜日に来て泊まって、木曜日に来て泊まってます」
「ではその時に娘さんに必ずやって欲しいことがあるんです」
「何ですか?」
「一つは体操です。大変かもしれませんが、娘さんが来られたときにおかあさんと一緒に体操をして欲しいんです」
「ええ、それは良いですよ。どんなものですか?」
「手で椅子の背を持って立ち、つま先立ちを20から30回、足踏みを20から50回、片脚を横に出して元に戻す体操を20から50回」
俺はやって見せながら説明した。
「最初は20回くらいから始めて、できそうなら少しずつ回数を増やします。そしてすこしでもやったら褒めてあげてくださいね。決して無理強いしないように。あ、そうそう、『おかあさん自身のためではなく、私のためにやって!』という感じでかまいません。
つまりこう考えてください。部屋替えもそうなのですが、これまでとは状況を変えること、これが大事です。これまでは『自分のために頑張って』と言ってきたわけでしょう。だからこれからは『私のために頑張って』とこれまでとは違ったことをたくさん積み重ねていきます」
「ああ、これまでと違うことをやって試して様子をみると言うことですか?」「ええ、そうです。それで上手く行きそうだったらそれを繰り返し、上手く行かなかったら別の言い方ややり方を試します。そんな風に考えてみてください」
更に娘さんがおかあさんにしてあげられる簡単な体幹のストレッチといわゆる「失禁体操」を指導する。失禁体操は娘さんも非常に興味を持って色々聞いてこられる。
「まあ簡単そうな体操だし、一緒にやってみます」
「あと、もう一つ!」
「えっ、まだあるんですか?」やや、不服そうな表情をされる。
「ええ、申し訳ないのですが、実はいくつかのことを同時にやってみることで状況変化がより大きくなるんですよ。それでですね、おかあさんは話すのが不自由そうですね。普段あまりしゃべらないので口の動きが悪くなっているようです。それで口回りの体操もいくつか一緒にやって欲しいんです。他の全身の運動と一緒にやるとより効果が出やすいのです。そして一度にいろいろ、短期に集中してやると効果も大きくなります。もちろん無理のない範囲で始めて、無理のない範囲で続ければ良いです。それにこの体操をやるとほうれい線が浅くなって、頬も上がって若く見えると言われてるんですよ!」
娘さんは思わず吹き出した。
「あら、じゃあ私もぜひやらなくちゃ!ええ、ええ、わかりました」
どうやら覚悟を決められたらしい。
「無理なくできそうなことはできるだけ続けてやってみます。一度に、同時に、いろいろやってみるんですね」
表情が更に明るくなった。
「そうです。そして申し訳ないですが、もう一つ。今は病院には通っておられますよね?失禁のことを相談したことはありますか?」
「ええ、今は近所の内科、整形外科に通っています。内科は糖尿とか脳卒中があるので。でも失禁については相談したことがありません・・・・整形は右股関節の頸部骨折があって、手術をした関係で3ヶ月に一度様子をみて貰ってます」「なるほど。内科ではたくさんお薬を貰ってますか?」
「ええ、とってもたくさん」
「ここしばらくで新しいお薬を貰ってますか?たとえば半年前くらいから・・・」
「半年前よりもっと前からのお薬で、あまり変わったものはありません。いや、確か・・・血圧を下げる薬を新しくして、脚が腫れたりとかしていくつか増えました・・・ともかく薬の数が多くて大変だと思ってたんです」
「今度内科に行かれるときに、先生に相談してみてください。ここしばらくいつも失禁するようになってしまったこと。もしかして薬の副作用が関係していないか、ということです」
ここでも娘さんの顔が輝いた。失禁体操と同じく納得できる解決策と思われたようだ。
「ああ、もしかしたら薬のせいだったかもしれないんですね。是非、相談してみます」
「それと・・・ケアマネさんから話を聞きました?」
「ええ、デイ・サービスを変わるっていう話ですよね。ケアマネさんといろいろ相談して、是非にとお願いしました」
実はデイサービスの変更をケアマネの裕美さんと計画したのだ。今は午前中に数時間のデイサービス利用で、リハビリをするだけである。ほとんど他の利用者さんと話をすることもないそうだ。おかあさんが人付き合いを億劫がるのでそうしたのだが、週2回の数時間のお出かけ以外はこの部屋で過ごしているため、この部屋との結びつきが強すぎるのだと思ったからである。娘さんの希望で入浴サービスがあって9時から4時までのデイサービスを今週中に母と娘で見学することになっている。デイサービスを変えればまた状況は大きく変化するだろう。
さて、サイは投げられた!後は結果を見ていくだけだ。
「しばらくは大変だと思います。何か気になることがあったらいつでもケアマネさんか僕に電話してください。また一週間後に連絡をします」と言ってその場を辞した。(その8に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「CAMR超入門 よく目にする光景(番外編)」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
CAMR超入門 よく目にする光景(番外編)2014/1/12
シリーズの途中ではありますが、早くも番外編(^^ゞ
これからシステム論の説明などに入のですが、その前に少し言っておきたいことがあります。
以前の投稿で「CAMRは第3の選択肢」と述べています。この意味は、CAMRが「対症療法的アプローチや根本的アプローチに取って代わる唯一のもの」という意味ではありません。あくまでも3つのうちの一つの選択肢であるということです。
対症療法的アプローチや根本的アプローチにたとえ問題があったとしても、それでダメだなどと言う気はありません。そんなのはむしろ当たり前なのです。どんな理論、アプローチ、考え方、技術にもそれぞれ良いところと悪いところがあります。限界があるのが当然です。もちろんCAMRもそうです。
僕は臨床家だから、臨床家の目で理論や技術の良いところを見ています。理論や技術が問題解決のための道具と考えれば、道具の使い方を考えていくわけです。たとえば穴を掘るために、柔らかい地面ならスコップ、固い地面ならまずツルハシを選択します。固い地面が掘れないからスコップはダメだ、などという気はありません。それぞれ使いどころが違っているだけです。
ただ自分がいつも臨床で選ぶ枠組みや技術が一つであれば、良いも悪いもないでしょう。一つしか知らなければ比較の対象がないからです。良いも悪いも、限界もできることも気づかないで仕事をしてしまうかもしれません。ひたすらどんな地面でもスコップを使うように・・・だから選択肢を持つことは重要なのです。(まあそれはそれでスコップ一つでいろいろな地面を掘ってしまう「スコップの達人」になるのかもしれませんが・・・(^^ゞ)
ただしシステム論を読み進めるうちに不快を感じる方がいるかもしれません。それは無理のないことなのです。子ども時代からずっと「正しい世界の見方、考え方」と学び、同僚や後輩、子どもたちにもそう言い、説得してきた自分の考えや立場、生き方を非難されているように感じるからです。
僕自身もそうでした。でもこれまでとは大きく異なる枠組みであるからこそ知る意味も大きい。
ここから先へ進むには好奇心と同時に少しばかりの勇気が必要です。それは自分の知っている世界の外側に未知の世界があることを知る勇気であり、その世界へ踏み出すための勇気です。(その3へ続く) 文責:西尾
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
意欲のない人(その6)-リハビリ探偵 新畑委三郎の事件簿
約束の日が来た。俺は挨拶をして娘さんと向かい合った。おかあさんはデイサービスに出かけている。
「まずおかあさんの失禁の回数を減らそうと思います」
娘さんはややびっくりして聞き返してくる。
「えっ、いきなりそんなことができるんですか?母は動く意欲をなくして、半分自暴自棄みたいな感じなんですよ。おしっこを漏らすのも平気になったみたいで・・・だからまず意欲が出ることが大事だと思ったんです。もともとおしっこ漏らして平気な人ではなかったんです。プライドも高くて・・・でも今は人生を捨ててるような感じで・・なんとか自分のために頑張って欲しいと思ってるんです」
「ええ、そうですね。人前で失禁してよしとするような方ではなかったんですよね?」
「ええ、それはもう几帳面で私たち子供にもとても厳しくてうるさかったんです」
「現在失敗したとき、おかあさんはどんな風に言われますか?」
「私が『しっかりしてよ、自分でできることはやらないとダメよ』と言うと『ダメなの、できないの、私は頑張ろうと思っても頑張れないのよ、しんどいの、辛いの、できないの』なんて言うんです」
「それで?」
「だから『自分のためにも頑張ってちょうだい』と言うと『もう私のことはどうでも良いの。頑張れないし頑張りたくない。もう死んだ方が良いの』なんて言うんです。『そんなことない、この間、一度頑張って公園に花見に行ったじゃない。頑張れるのよ』と言ったら『あれはあんたのために頑張ったのよ』なんて言うから『ダメよ、自分のために頑張らなきゃ』って言ったんですよ・・」
「なるほど、自ら生きる意欲がないということですね・・・まあ、それが一番大きいかもしれませんね。ただその意欲を回復してもらうためにも、身の回りのことで上手く行くことが沢山あれば良いと思います。身の回りの色々なことが上手く行き出すと、自信も出てくるし、結果的により良く生きようという意欲も高まってくると思うんです。その一つとしてまずは失禁の回数を減らそうと思うんです。
どうやってやるかというと、まず、おかあさんの失禁は、今、この部屋で娘さんも含めての状況の中で起きているんですね。だからこの状況を変えてみようと思うんです」
娘さんはあっけにとられた顔になった。「そりゃ、失禁が治ったり回数が減れば嬉しいんですけど、そんなことできるんですか?」
意欲は高められると信じているのに、失禁は意欲を高めないと難しいと思っておられるようだと感じた。やはり、人間は面白い。「まあ、一度だまされたと思ってやってみませんか?まずやることは部屋の模様替えです。それからおかあさんに対する態度も変えてみましょう。娘さんが来ているときだけで良いので日課も加えます。環境と生活を少し変えてしまうんですね」
「そんなことで上手くいくんですか?だって今回のこととはまるっきり関係ないことじゃないですか?」かなりご不満の様子だ。仕方ない。
「一見そう見えても、これで上手くいくことが多いのです。もし、これで変化がなかったら相談料はいりません!だから試してみませんか?」
しばらくあっけにとられていたが・・・「えっ・・・ホントにそれで上手く行くと思ってるんですね・・・・そこまで言われるんなら試すだけ試してみましょうか」少しその気になってくれた。相談料はいりませんというのは、こういった場合によく使う手だ。俺の言うことはあまり信用されないらしく、いつもこうでも言わないと受け入れてもらえない。
娘さんが言う。「何をどうしたら良いんですか?部屋の模様替えと言っても・・・・実はテーブルの回りが汚いので私もきれいにしようと思ったら母が怒るんです。動かすと困るって・・・だからできないんです」
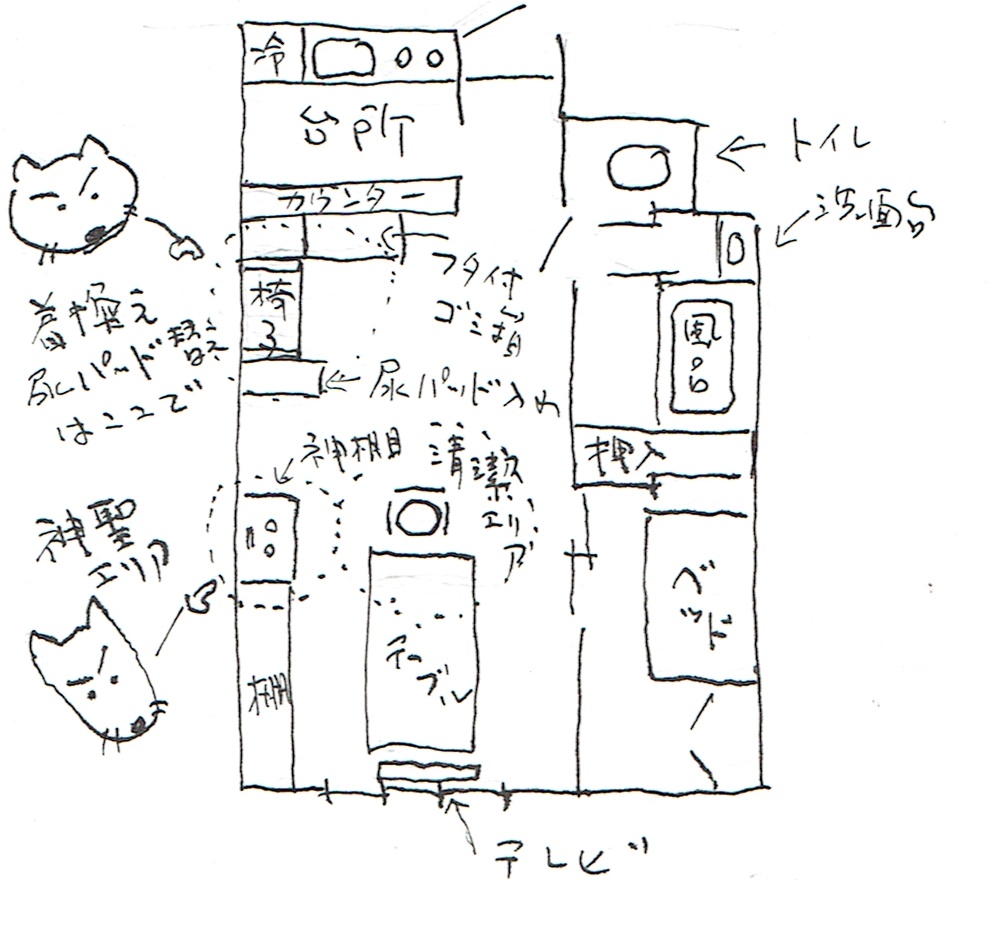
「そうですか、ではできるところから始めましょう!まず最初は、おかあさんは食べることもお茶も神様の本を読むのもテレビも、そしておしっこもおむつ換えも全部この椅子で行われていますね?」
「ええ、そうです!」
「では清潔な活動とそうではない活動、たとえば尿パッド換えなどは場所を分けるようにします。それとおかあさんは神様などに関わる神聖な活動にご熱心ですよね。これを合わせて三つの活動の場所をはっきり分けてしまいます。神様の本は神聖なものだから、あの神棚の下の飾り棚の空いた部分に置き、あの辺りを神聖な場所とします。そして蓋付きバケツと尿取りパッドや紙パンツ類はあそこへ」と指さす。そこは台所のカウンターのこちら側にある段ボールが積んである場所だ。
「あそこへ使われていない椅子とその尿取りパッドが入っているそのテーブル脇のユニット棚を持って行っておむつ換えの場所にしましょう」
「でも母が承知するかどうか・・・」
「そうですね・・・神様関係は神聖なものだから、今のようにごちゃごちゃとお下のものなんかも一緒にしていると不敬に当たる、なんて言ったらどうでしょう。あるいはこの席で神様の本を読むんだったら、この場所を清潔な状態にして神様に接しましょう、というのはどうでしょう?あるいは神様の本を読む時には身の回りを清潔にし不浄のものを回りに置かないで読んだ方が良い・・・と説得してみたらどうでしょう?」
「ああ、なるほど!ええ、それなら言ってみる価値はあると思います」
そんなこんなで、大雑把に部屋内を三つの区画に分ける計画と説得するための言い訳を二人で話し合い、また部屋の模様替えの計画を二人で考えた。娘さんは熱心にメモをとっている。
「これで間違いなく、おかあさんの振るまいが変化すると思います!」
少しだけ娘さんの態度が生気を帯びてくる。何でもないようだが、やることとその意味を明確にし、ご本人ができると確信できてくると、集中力もやる気も高まってくるものだ。 だが、実際にはまだやることは山積みである・・・(その7に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「CAMR超入門 よく目にする光景(その2)」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
CAMR超入門 よく目にする光景(その2)2014/1/4
「その1」では、対症療法的アプローチが以下のような思考の流れから生まれてくることを説明しました。
①人はしばしば間違った姿勢や運動をするものである。
②そして間違った姿勢や運動は痛みや危険性、効率の悪さにつながる原因となる。
③だから専門家が、正しい姿勢や運動を指導・矯正しないといけない。
対症療法的アプローチの特徴は、「どうして間違った姿勢になってしまうのか?」という原因追及のプロセスが抜けてしまっていることです。そこで以下のように流れを変えてみます。
①人はしばしば間違った姿勢や運動をするものである。
②間違った姿勢を取る原因を考えてみよう。たとえば背景には運動をしない生活習慣がある。結果体が硬くなり、特に下肢筋や腹筋が低下して悪い姿勢になってしまった。
③そして間違った姿勢や運動は痛みや危険性、効率の悪さにつながる原因となる。
④だから専門家が、根本原因にアプローチし、また正しい姿勢や運動を指導・矯正しないといけない。
この流れの中では、ただ姿勢を直すように口頭指示してもダメだということが分かります。根本原因に筋力低下などが挙げられていますので、歩きながら指示するだけでなく、弱ったと思われる筋力や低下した柔軟性を改善する訓練が必要です。
結果柔軟性が改善し、筋力もアップしてきて、良い姿勢の保持ができるようになります。
さて、というわけで、若き日の僕もすぐに根本的アプローチの信奉者になりました。日々出会う多くのケースでは根本的アプローチは有効と感じられました。根本的アプローチ、万歳!めでたし、めでたし・・・
しかしそのうち、幾つかの疑問、あるいは懸念を持つようになりました。(その3に続く)文責:西尾
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
意欲のない人(その5)-リハビリ探偵 新畑委三郎の事件簿
状況変化型アプローチを進める場合のもう一つの重要なコツは、主たる問題解決者である娘さんは何を問題にしているのか?ということだ。彼女の依頼は「意欲がないから高めてくれ」だ。確かにおかあさんにより良く生きようとする意欲が高まると、万事上手くいくと考えるのだろうが、そんなに都合の良い問題解決はない。そんな目標が達成可能なら、世の中は誰も苦労しないのである。これは「理想家の目標」である。つまり実現不可能な目標だ。
実際には娘さんの言葉の端々には、「おしっこを漏らしていてそれが苦労の種」というニュアンスがつきまとう。説明にはあまり触れられないが、来る度に溜まった洗濯物や尿臭のある掛け布団やクッションの処理に疲れるだろう。だから解決するべき問題は、「尿漏れ」であり、「尿漏れが減り洗濯物が減る」が目指すべき解決の1つの状態だろう。これは「意欲を高める」に比べて実現可能な目標である。
俺のように問題解決をして相談料を頂く仕事では、大事なのは依頼人の満足である。だからどうなると満足されるかを考えるのは一番大事なことだ。娘さんは「おかあさんの意欲を高めたい」と依頼されたが、これを言葉通りにとって、仮に俺がおかあさんを上手く操って「明日から私、頑張るわよ!」と娘さんの前で言って運動をしてもらうとしよう。娘さんは一瞬喜ばれるかもしれないが、失禁が変化しなければいつまでも満足はされないはずである。
これは普通のリハビリでも同じだ。患者や家族は言葉にならない具体的な願いを持っていることは珍しくない。また「こうなったら良いのに」という理想の目標を口にされることも少なくない。結果的には実現できない目標よりは、少しでも実現できる目標こそが大きな満足を生むものである。
さて、この二つが決まると具体的に状況変化アプローチの具体的なロードマップを作成する必要がある。これには時間がかかるので家に帰ってゆっくりと考えよう。
また「失禁とそれに伴う介護量の負担」が問題、「失禁の回数減」が目標として決まったので、こちらに対する原因追及型のアプローチのロードマップを考えてみる。
本人に認知症はないようだが、これはもう少し慎重に構えていたほうがよい。もう少し様子をみよう。
デイサービスの報告書では「娘さんへの依存性が高まって意欲がなくなったから」なんて言ってたが、それはどうも薄い。認知症もなく、単に依存性が高まって、動く意欲が低下して失禁が出るようになったとは考えにくい。むしろ逆だろう。失禁が始まって、それを自分でコントロールできず、無力感と自信のなさから意欲が低くなって、依存性が高まる・・・というのはこれまでもよく目にしてきた。
実際のところ、話を聞きながら俺には心当たりがあった。半年くらい前から失禁が始まったことを考えると、何かその頃に始まった状況変化が影響したかもしれない。すぐに思いつくのは薬の副作用である。もしその頃に新しい薬が始まっていればそれが怪しい。
もう一つはあの表情のなさが気になる。うつ病などでも失禁はみられるらしいので、精神科を受診して貰ったらどうだろう。
これで原因追及型のアプローチのロードマップはできあがった。一番の原因候補は薬の副作用であり、二番目の候補は精神疾患である。一つ目は主治医に相談してもらって、怪しい薬をやめてもらう。これで上手く行かないときは、精神科を受診してもらう。実にシンプルである。原因追及型は問題解決の道筋が単純だ。 このように因果関係の考え方、つまり原因を探してその原因を解決する考え方は、複雑な出来事をシンプルに理解して、問題解決を簡単にすると考えられている。これが利点である、と。だが物事はそんな簡単にはいかない。
たとえば脳卒中では体が不自由になるが、その原因はマヒであり、そのマヒの原因は脳の細胞が壊れたからである。これも実にシンプルな構造だ。原因は明確である。しかし原因が明確だからと言ってリハビリで壊れた脳細胞を再生、あるいは機能的に再生する手段はない。つまり原因がわかっても原因をなんとかする手がないのだ。どうしようもないのだ。人の体や振る舞いではこのようなことが多い。 医療的リハビリテーションでは障がいを問題にするが、根本原因である障がいは本来治らないものである。だからリハビリテーションの基本的な考え方は、現状をより良い状態にすることだと思う。
学校で習う原因追及型の問題解決は、一般の医療の第一の目標となる「病気の原因を治す」という方向性を持つが、リハビリでは「状況をより良く変化させる」という方向性を持つ状況変化型の問題解決が相応しい場合も多い。だから俺は常に二通りの問題解決を進めるわけだ。
しかし何はともあれ、今回ばかりは「原因追及型の問題解決」には俺も自信がある。「きっと薬の副作用かうつ病傾向かのどちらかだろう」と思っている。それで解決しそうな予感がする。だからいっそのこと、面倒な状況変化型のアプローチはしないで「原因追及型の問題解決」だけを進めてみようかと思ったりもする。その方が娘さんにも苦労をかけないし、俺も面倒な計画を立てなくて済む、と思う。
でも一方では「俺にできるだけのことはやってみる」という俺なりの方針みたいなものをいつの頃からか漠然と抱いている。今回の件では裕美さんも関係している、そうだ、できるだけ良いところを見せないといけないのだ!「そうだ!やっぱりできるだけのことはしてみよう!」そう結論づけたところで家に着いた。(その6に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「CAMR超入門 よく目にする光景(その1)」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
CAMR超入門 よく目にする光景(その1) 2013/12/28
最近見たテレビ番組にこんなのがありました。「肩凝りや頸部の痛み、手の痺れは、実は首を含めた全身の姿勢に問題があることが分かってきました。専門家の先生に良い姿勢を教えてもらいましょう・・・さあ、これが良い姿勢です!そしてこれが良い姿勢をとるコツです。こうすると良い姿勢になります!」
他にもこんな光景があります。訓練室で歩行練習する患者さんとセラピスト。患者さんがずっと足下を見ながら歩いています。そうするとセラピストが「○○さん、また足下ばかり見てますよ。前も見ないと危ないですよ。顔を挙げて」と優しく注意します。○○さんは「はい」と顔を挙げて胸を張りますが、またしばらくすると顔を下げ、背が丸まってきます。するとセラピストがまた「顔を挙げて!胸張って!」と注意します・・・
これらの光景は以下のような思考の背景を持っていると思います。
①人はしばしば間違った姿勢や運動をするものである。
②そして間違った姿勢や運動は痛みや危険性、効率の悪さにつながる原因となる。
③だから専門家が、正しい姿勢や運動を指導・矯正しないといけない。
もうお気づきでしょうが、これが対症療法的なアプローチの流れです。目に見えた問題をそのまま口に出して、矯正しようとしたりします。「もっと足を高く上げて!」などと、継続的な口頭指示を続けるセラピストがいますが、その場その時に出ている症状に焦点を当てています。でも指導しながら心の中で呟くのです。「何度言ってもすぐ忘れるんだから・・」
実は僕自身、若い頃はこんな訓練をしていました。ただ見守って歩いていても仕事してないみたいだし(^^ゞ、何かもっともらしい指示出した方が専門家っぽいし・・・(^^ゞみたいなところもありました。でも言っても言っても一時的な変化しか生まない、ということに気がついて「俺何やってんだろう・・」などと思いました。「問題を指摘することは無駄なのではないか・・・」という思いがある日、胸に兆したのです。(その2に続く) 西尾←これまで名前書いてなかったので(^^ゞ
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!













