≧(´▽`)≦
みなさん、ハローです!
ついに待ちに待ったCAMR入門シリーズの電子書籍が誕生しました!
西尾 幸敏(著)「システム論の話をしましょう!」CAMR入門シリーズ①
このシリーズは、CAMRのFacebookページに投稿された記事を中心に組み立てられていく予定です。特色はなんといっても、「わかりやすさ」と「楽しさ」だと思います。取り扱っているテーマやアイデアは決して簡単な内容ではありませんが、それゆえにこの二点を意識した工夫が随所にちりばめられています。内容の直感的な理解を助けるユーモラスなイラストなどはその代表的なものでしょう。
もっともこれらの工夫や試みが成功したかどうかは、読者の評価に委ねるしかありません。ぜひ本シリーズを手に取っていただき、評価者の一人としてもこの企画に参加していただけると幸いです。
さて、記念すべきシリーズ第一弾は「システム論の話をしましょう!」です。システム論のアイデアは抜群に面白いのですが、いざ臨床応用しようとすると何をどうすればいいのかわからず路頭に迷うという経験をしたことがあります。
そんなある意味捉えどころのないようなシステム論ですが、本書では明確に臨床応用に結びつけられた分類が提案されています。なかなか興味深い提案だと思うのですが、みなさんはどう思われるでしょうか?
アメリカでの徹底的な議論の末、Ⅱ step conference(1990年)においてリハビリの世界に産声をあげたシステム論は、早いものでもう31歳を迎えました。
「ようやく僕が活躍できる新しい舞台が出来てきたようだね。そろそろ出番かな?」
こんなシステム論の心の声が、さわやかな春の風にのって聴こえてくるようです。ぜひみなさんも耳を澄まして、この声を感じとっていただけたら嬉しいです。
【目次】
CAMR入門シリーズ① システム論の話をしましょう!
電子書籍発刊に寄せて
はじめに
第1章 システム論の分類
1.河本の分類
2.西尾の分類
第2章 素朴なシステム論的アプローチ
1.常識的な考え方の傾向
2.素朴なシステム論的アプローチ(第一段階)
3.素朴なシステム論的アプローチ(第二段階)
第3章 外部から作動を見るアプローチ
1.why?(なぜ?)の視点とhow?(どのように?)の視点
2.課題主導型アプローチ
3.運動をリソース(資源)とスキル(技能)の視点で見る
4.課題達成をリソースとスキルで説明する
5.アメリカの課題主導型アプローチの現場を見学して
6.課題主導型アプローチの問題点
第4章 内部の視点から運動システムの作動を見るアプローチ(CAMR)
1.内部の視点から運動システムを見てわかったこと
2.運動システムの作動の性質
3.問題解決が新たな問題を生み出す
第5章 システム論の視点のまとめ
1.リハビリに使えそうなその他のアイデア
2.人の運動システムの作動の性質を基にした治療方略へ
CAMR研究会について
著者紹介
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!



正しい歩き方?-そんなに形が大事か?(その4 最終回)
さて、僕としては今回は、機能や運動システムの作動の性質を基に「正しい歩行」とは何かを提案し、その実践に当たった男の苦難の記録を述べることが目的でした。
しかし!次回の投稿の後でまた新たに以下のような意見を頂いてしまったのだ。
「あなたの言うこともわからないでもないが、患者さんの中には『私はきれいに歩きたい』という人も実際にいるのだ。そんな人の要望にも応えることは必要ではないか?」
実は15年くらい前に上田法の講習会でシステム論の講義をするためにドイツを何度か訪れた。その時一人の高齢の女性PTから同じようなことを言われた。それは講習会の最後の講義の一つ前の休憩時間だった。「システム論では歩けば良いみたいなことを言うけれど、私はイヤだ。どうせ歩くなら健常者のようにきれいな形で歩きたいのだ。あなただって歩く姿は気になるはずだ。だから私にはシステム論は不要だ」のようなことを言われた。その時の僕にはまだはっきり答えるだけの準備はできていなかったし、あいにく通訳もそばにおらず、講習会の最後の方でバタバタしていて、僕の英語ではほとんど何も伝えられなかった。今でも大きな心残りの一つである。
今ならこんな風に伝えるのではないか。「では健常者のように歩けないなら、あなたは歩くのを止めますか?僕なら、歩けるようならどんな形であれ歩きたい。 それに人前で歩くのが恥ずかしいと思っている患者さんのために『頑張れば健常者のように歩けるよ』と嘘も言えない。
僕にできることと言えば次のように正直に説明することだ。『一緒に協力すれば今より早く、安定して歩くことは可能かもしれない。その結果、今とは異なった歩行の形になると思います。今より少しは颯爽としているし、今より力強い形になっているかもしれない。でも元通りの健康な頃の形で歩くことはできないと思います。
でもあなたは最初寝たきりの状態から、座って立って、ものすごい努力と勇気でここまで歩かれるようになってきた。これはものすごいことだ。とても困難な状況にチャレンジしてなんとか歩けるようになったのです。あなたの歩行は努力の結晶です。あなたはもっとその歩き方を誇りに思って良いと思います』と。
もしそれでも『健常者の歩行に近づきたい』と言われれば『もし僕で良ければ、僕のできる範囲で最大限努力する』と伝えます。それは患者さんからの希望だから。その時点でもう断られるかもしれないが(^^;
ただ最初からセラピストが『患者は健常者のように歩くべき、美しく歩くべき』という単一の価値観を持って患者さんに当たるのは間違いではないか?『とりあえず歩いて、早く家に帰りたい』と思っている患者さんもいるだろう。たしかに僕たちとしては最大限患者さんの希望に添うべきだ。セラピストの価値観だけで、訓練の方針と内容を決めるのもおかしいと思う。セラピストとして自分のできる事を正直に伝えて、患者さんにどうするかを選んで貰うことが基本では?」
さて、あなたはどう思うだろう?(終わり)(申し訳ない。今回のシリーズはこのタイトルをつけてしまったので、この流れになってしまいました。僕のウォーキング物語はまた別のシリーズで改めて書きます)
プロの運動問題解決者Professional motor-problem solverになろう!
-プロの運動問題解決者になるためには
僕たちセラピストはプロの運動問題解決者である。他人の運動問題を解決することを生業(なりわい)にしている。僕たちの仕事の場合、根本的な解決は無理であることが多いが、それでもその問題がより軽くなるよう、より良い状態になるような問題解決を目指すことが必要である。
そのために必要なのが問題解決の手段である。少なくとも二つが問題解決の手段としてよく知られているが、それらの長所・短所の理解は必要である。
学校では要素還元論を基にした問題解決方法を習う。これは問題が起こると、その問題の原因を探る方法だ。運動問題なら、運動の構成要素、つまり筋力・可動域・感覚・バランスなどと要素毎や部位毎に分けて どこに原因があるのか探る。次にその原因と問題との間に因果の関係を想定する。そしてその原因にアプローチするのだ。しかしこの方法は非常に有用ではあるが、万能ではない。
たとえば脳性運動障害では脳細胞が壊れることが原因だが、今のところリハビリで脳細胞やその機能を再生することはできない。つまり原因がわかったからといって解決できるわけではない。
また慢性痛のように様々な要素が関係し合って問題が形成されていると、一つの原因だけにアプローチしても大きな変化は起きない。問題はその一つの要素だけでなく他の要素も影響し合って生まれているからだ。
だからプロの運動問題解決者としては、他の問題解決方法も身に付けて、状況に応じて使い分けるのが良い。
CAMRで勧めているのは、システム論を基にした状況変化アプローチである。問題が起こる状況を変化させて少しでも良い状況を作り出すことを考えるのである。CAMRには状況を変化させるための理論と技術がある。視点を全く変えることで意外な解決方法を生み出したり、今、この場でできる事をできるだけ沢山見つけてそれを積み重ねていったりする。マヒや認知症は治せなくても、状況変化は必ず起こせるのである。
こうしてセラピストとして2種類の問題解決手段を持つことになる。学校で習った原因を探して原因にアプローチする方法と状況を理解して状況を変化させるアプローチである。どちらの方法にも長所と短所があるので、それを熟知して、状況に応じて適切に使い分けられるようになればプロの問題解決者としての力量はそれまでとは比べものにならないくらいアップするだろう。
CAMRでは、ようやく、ようやくネット上での情報提供の準備が整ってきました(^^;近・日・公・開!乞うご期待!!
治療方略について考える(その10 最終回)
治療方略:治療の目標設定とその目標達成のための計画と方策
前回の続きです。前回は素朴なシステム論の視点から理解した運動システムの作動の性質をまとめました。今回はそれを元にした治療原理と治療方略を考えてみます。
【素朴なシステム論によって生まれるアプローチの体系】
2. 治療原理
①治療とは1つあるいは少数の要素を改善することではない。身体、精神、環境、仕事や生活習慣などの影響を受けて生まれる状況を変化させることである
②状況を変化させるためには変化させられる要素をできるだけ多く変化させよ。あるいは要素間の関係性を変化させよ。
③アプローチして良い状況変化が出れば繰り返せ。変化しなかったり、悪くなるようなら別のことをやって見よ(状況変化が良いか悪いかは予測が難しく、やってみないとわからないことも多い。経験を積むとおぼろながら予測がつくようにはなる)
④一時的な変化と持続的な変化を見分けること。毎回元の状態に戻っているようなら、それは揺らぎをおこしているだけ。変化しない、つまり停滞の状態なので別のことをやって見よ。
⑤問題解決の主導権は、その問題解決を一番望んでいる人(患者や家族)が持つべき。セラピストはサポートの役割であることを意識せよ
3. 治療方略
①部位や要素に拘ることなく、その時、その場で変化できそうなものはできるだけ多く思いついて実施してみよ。そして今やっていることを色々と組み合わせてみよ。やって良ければ繰り返せ。ダメなら他のことをやったり、違う組み合わせを考えよ(多要素多部位同時方略)
②問題解決には、継続したアプローチが必要なこともあり、無理なく継続できるよう問題解決に一番意欲的な人物を中心に治療を展開することを考えよ(クライエント-セラピスト協働方略)
こうして、学校で習った機械修理型治療方略とはまったく異なった治療方略の体系を手に入れましたね。
「多要素多部位同時方略」と「クライエント-セラピスト協働方略」です。それぞれには更に詳しい説明がありますが、ここでは省略します。また機械修理型方略も状況によっては有効なのでこれで3つの治療方略を持つことになります。
システム論には今回検討した「素朴なシステム論」の他に科学的研究や哲学的視点を基にしたものがあり(「システム論の話をしましょう!(その1)に出てくる分類の②と③)、それらからも非常に重要な、エキサイティングな治療方略が生まれますが、今回はこれで一応区切りをつけます(終わり)
![]()
治療方略について考える(その9)
治療方略:治療の目標設定とその目標達成のための計画と方策
前回龍馬君が理解したような内容は、多くのセラピストも経験していて、直感的に漠然と自分だけの治療方略として身に付けていることを述べました。しかしそれは感覚的に理解したもので、決して明確に言語化されないし、体系化されることもありません。そのため必ずしもその治療方略は他の場面で応用されなかったり、他人に伝えることもできないのです。惜しいことです。
だから今回は「素朴なシステム論」を基に、いつでも臨床で使えるように、簡単に「運動システムの作動の性質」と「治療原理」、「治療方略」としてまとめておこうと思います。
ただし龍馬君の経験はまだまだ不十分なので、ここではCAMRの知識体系を追加してより臨床で使えるように修正しています。
【素朴なシステム論によって生まれるアプローチの体系】
① 人の運動システムの作動の性質①運動問題は、問題の見られる部位の周辺の要素だけでなく、全身の様々な要素が関係している。つまり運動問題は全身の様々な部位や要素などの相互作用として生まれている
②更に運動問題は、仕事内容や環境、生活習慣、性格なども影響している。身体を含めそれらの沢山の要素の相互作用から生まれる状況によって運動問題が生まれている
③また徒手療法で身体の一部位を変化させて治ったように見えても、上記の慢性痛を生み出す状況の中で変化は消耗され、痛みを生み出す状況は元に戻ってしまう。つまり一時的な変化を起こしているだけ。
④一時的な変化は元々持っている揺らぎの範囲に過ぎないかもしれない。いくら繰り返しても持続的な変化にはならないかもしれない。(一時的な変化と思われるものが持続的な変化に変わることも時々往々にしてありますが、それには条件があり、ここでは述べません)
⑤結局、繰り返す問題とは、その問題を維持するような頑固な状況の中にある
⑥セラピストが問題解決にしゃしゃり出て主人公になってしまうと、患者は依存的に振る舞うのではないか。
そして上記のことから、次のような治療原理と治療方略が生まれてきます。(その10に続く)
毎週火曜日の連続エッセイもいつの間にか連続100週を超えていました(^^)何か記念のイベントすれば良かった(^^;)
治療方略について考える(その8)
治療方略:治療の目標設定とその目標達成のための計画と方策
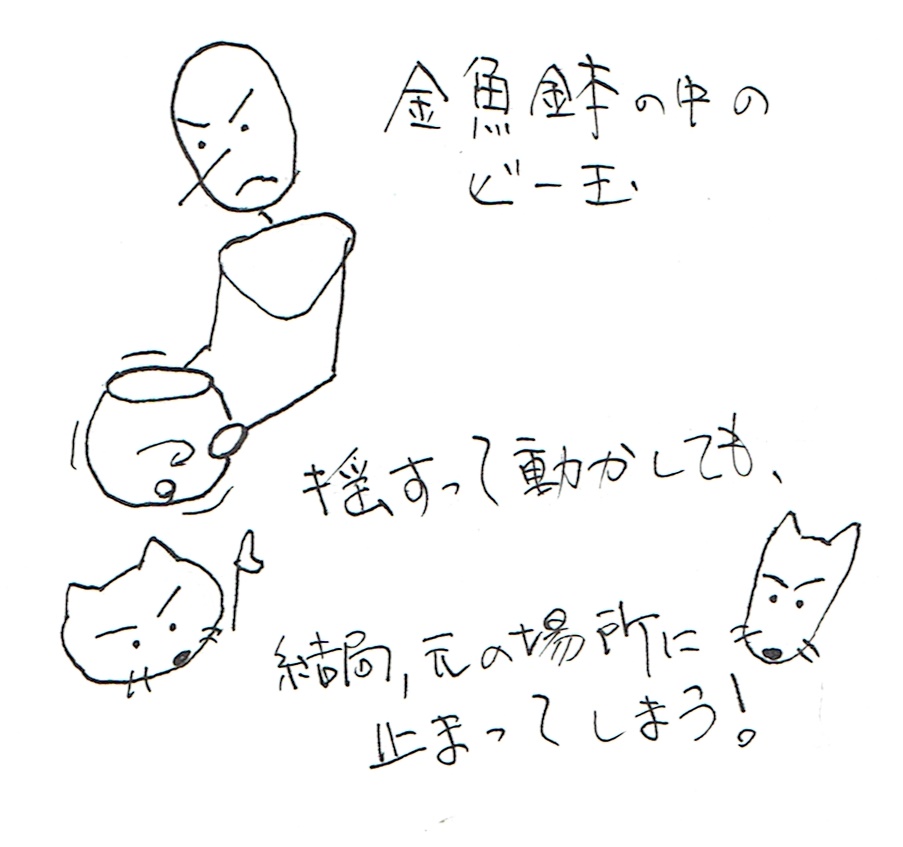
また龍馬君は、沢山の要素の複雑な相互作用によって作られる状況下では、1つの要素を変化させたところで、その変化は相互作用の中ですぐに消耗されて元の状況に戻ってしまうということに気が付くのです。ちょうどビー玉の入っている金魚鉢を揺するところを想像してください。金魚鉢を揺するとビー玉は動き出しますが、重力と摩擦によってやがて止まってしまい、再び元の同じ場所に落ち着きます。
つまり最初に行っていた痛み周辺の軟部組織の徒手療法は、一時的な痛みの改善という変化を起こしているだけで、その改善も日々の生活の中ですぐに消耗されてしまって元の痛みの状態に戻っていたのです。
また一時的な変化を繰り返しても決して持続的な変化にはつながらないなら、それは運動システムが持っている揺らぎを起こしているに過ぎないと思いました。だからやり方を変えないとダメだということに気がついたのです。つまり金魚鉢を揺すっているようなもので、一時的な変化は起こしてもまた元の状態に落ち着いてしまうのです。
さらに龍馬君は「自分が患者さんの運動問題を解決してあげるのだ!」と意気込んで、そのように努力し、振る舞ってきました。二郎さんに褒められたため、更にその傾向を強めたのです。しかし実はその振る舞いは二郎さんとの関係の中では、「どうするべきかを指示する龍馬君とそれに依存する二郎さん」という強い依存関係を作っていたことに気がつきます。
龍馬君は一生懸命に考え、努力して、問題解決の主導権をいつの間にか強く握っていたし、二郎さんは「この先生について行けば、この問題は大丈夫、いつか解決する」と依存してしまったのです。
そして龍馬君は、二郎さんが自分に依存していること、しかし問題解決の主役は自分ではなく、二郎さん自身だと気がついたのです。誰より二郎さんの腰痛が治ることを願っているのは二郎さん本人に違いないからです。それで問題解決の主導権を自分から二郎さんに返してあげることにしました。そのためには患者教育が大事であることに気がつき、痛みの原因と解決の丁寧な説明をしました。こうして治療の主体はセラピストから患者自身に移っていったのです。結果、二郎さんは運動によって自分の痛みが解決できることを知ったのです。痛みに支配されていたのに自ら痛みをコントロールされるようになったのです(その9に続く)
治療方略について考える(その7)
治療方略:治療の目標設定とその目標達成のための計画と方策
さて龍馬君のようなストーリーはセンスの良い、向上心のある、自分の間違いや未熟さを素直に受け入れるセラピストなら、程度の差こそあれ経験しているのではないでしょうか?
最初龍馬君は学校で習ったように、身体の構成要素を基に因果の関係を想定していました。しかしそれでは上手くいかないのです。つまり腰部周辺の軟部組織だけが原因だとする「機械修理型治療方略」だけでは一時的な変化しか起こせないと気づきます。
実際の慢性痛にはより沢山の身体部位が関係し合っている、つまり身体内の軟部組織が幅広く影響しあっていることに気づきます。さらに軟部組織のみではなく、身体内の様々な要素、つまり関節内運動や血液循環の低下、神経の圧迫などと関係する要素群に気づきが広がっていきます。これが素朴なシステム論の第一段階です。つまり身体内の様々な部位・要素の相互作用として腰痛という問題が生じると気がつくのです。
また次にはこの慢性の痛みが、身体の構成要素だけに止まらず、仕事や環境、生活習慣などの相互作用によって生まれていることに気がつきます。痛みはまさに身体だけで作られるのではない。こうなると素朴なシステム論の第二段階です。アプローチする構成要素は身体内に止まらず、仕事環境や運動習慣、生活習慣などに広がっていきます。
つまり運動システムの作動は機械のように明確で単純ではなく、各部位や要素がお互いに影響を受け合って変化しながら1つの状況、つまり腰痛という状況に落ち着いていくことに気がついたのです。龍馬君は経験を通して、運動システムの作動の性質の一つ、「身体のみならず環境や習慣などの各要素間の相互作用によって問題が繰り返し生まれる状況が作られる」ことに気がついたのです。(その8に続く)
治療方略について考える(その3)
治療方略:治療の目標設定とその目標達成のための計画と方策
前回は学校で習う治療方略は「機械修理型」であると述べました。人の運動システムを構造として理解し、問題のある部分や要素を探して治療する過程は、機械の修理と共通しているからです。
実際、人の運動システムとロボットのシステムの構造を簡単に比べてみましょう。たとえば力を生み出すのは人では筋肉、機械ではモーターでしょうか。神経系はコンピュータだし、呼吸・循環系は電池やその配線に喩えられるでしょう。構造で比べると、一見、人の運動システムとロボットには沢山似た点が見つかリます。
でも運動システムの作動の性質で見ると両者はまるっきり異なってきます。実はそこには大きな構造の違いもあるのです。
たとえばロボットがどんな仕事ができるかは、ロボットができあがったときに決まっています。人と話したり、移動できる能力はできあがったときに決まっていて、急にトランポリンやボルタリング、料理をしろと言われても無理です。それらをするための機能が手足にもコンピュータのプログラムにもないからです。でも人の運動システムは、一つの体で、移動し、探し、食べ、作り,戦い、逃げます。更に新しい運動課題を自ら学び、無限と言って良いほど活動を増やし続けることができます。
というのも機械の部品はいつも同じ役割・作動を繰り返します。ギアは回転し、力を伝達するだけです。それぞれの部品を組み合わせたユニットでできることも決まっています。でも人の運動システムでは、各要素・各部位に特定の固定的な機能は定まっていません。
身体の部分で見ても、上肢はものを操作したり、ぶら下がったり、投げたりできますが、体重を部分的に支えて歩く助けもします。手の機能は無限で何に使うかは状況次第です。脚だって歩くだけでなく、字を書いたりものを操作したりもします。 また、1つの筋肉は状況によって、求心性にも遠心性にも異なった運動を生み出します。筋の張力を生み出すメカニズムには、通常の随意的な神経筋ユニットの他に、反射やキャッチ収縮、あるいは単に粘弾性の性質自体があり、1つの運動をするにしても状況によってどのメカニズムが使われるかは異なってきます。(Keshnerの頭部保持の実験などにその具体的な例、頭部の保持に用いられるメカニズムは体幹を揺らす速度によって変化する、があります)
また神経系も1つの神経細胞が多くの入力と出力の構造を持っており、状況によって働きを変化させていると考えられます。神経への1つの入力が状況によって異なった反応を生み出し、神経細胞の1つの出力は状況によって異なった運動になるからです。
早い話、1つの運動を様々な異なった筋群で達成するし、逆に1つの筋群で異なった様々な運動をする可能性があるのです。
一見して共通している構造のように見えて、実は大変な構造の違いがあることがおわかりでしょう。ロボットではそれを構成する部品は決まった作動を繰り返すだけで、全体としてできることも決まっています。まあロボットは実現しようとする機能に特定され、それしかできない、いやそれを実現するための最小限のシステムなのです。人ではそれを構成する様々な構成要素は柔軟で多様な働きをし、全体としても信じられないくらい多様で無限の機能を生み出す可能性に満ちているのです。そしてこのことはそれぞれの作動に大きな違いを生み出していくのです。 ロボットの修理のように動きの悪いところに油を差すような考え方ではとても追いつかないところもあるのです。(その4に続く)
E.A.Keshner, Controlling stability of a complex movement system, Physical Therapy 1990:70:844-855
≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「CAMRの旅お休み処 シーズン2 その五」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
CAMRの旅お休み処 シーズン2 その五
「運動を、形ではなく機能でみる」2013/4/7
CAMRはシステム論に基づいて運動をみています。システム論的にみると、今までの見方とどう違うのか?その説明がホームページやここで展開されているのですが、言葉ではわかっても、実際にどういうことかというのは、ちょっと掴みにくいところかもしれません。
「システムとしてみる」を、「要素に分解しないで全体としてみる」と捉えると、外れではないけれどますますよくわからなくなる。うすぼんやりと全体を眺めても、一体どうしたものやら・・・。そこで、ヒントが「形ではなく、機能でみる」です。
その参で、「立位での踵上げ」を取り上げましたが、 この課題は「抗重力位での足関節底屈」=形でみる、ではなく、「狭い基底面で支持しながらの垂直方向の重心移動」=機能でみる、です。この場合はやり方にあまりバリエーションがないので、形を問わないと言っても、だいたい同じ形になります。
歩行をみてみるとどうでしょう。従来行われているのは、形による歩行分析です。一見「正常」があるように思われますが、状況に応じて変化することが大事、というのはこれまで述べてきたとおりです。となると、形は無限にあります。けれど、機能でみると、「支持して、対側を振り出し、重心移動」というのは共通しています。
どんな形かはクライアントにまかせる。クライアントはどのように機能を維持しようとするのか。より有利な方法をクライアントが試して選ぶためにはどんな課題をやってみてもらうか。板跨ぎ課題で、「支持する足の膝を少し曲げてみて」と、形の指示に見えることをいうこともありますが、反張膝という形はいけないからではなく、段差や坂道では不利だからです。あ、この説明は少しずれたかな(^^;)
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
治療方略:治療の目標設定とその目標達成のための計画と方策
「敵を知り己を知れば百戦危うからず」
これは兵法で有名な孫子の言葉です。「危うからず」とは負けないこと。つまり勝つことも良いには良いが、まず負けないことが一番大事だと言っている訳です。そして負けないためには自分のことと敵のこと、どちらもよく知る必要があると言っているのです。
振り返って僕たちリハビリの仕事も、戦争に喩えるなら勝つことの難しい戦いです。というのもリハビリでは多くの場合、運動障害という治すことができないものを相手にしているからです。
たとえば脳性運動障害後のマヒはリハビリでは治りません。日本では50年以上前から壊れた脳の神経細胞の再生や他の脳細胞で機能を代償させてマヒを改善しようとするリハビリ・アプローチがあります。しかし未だにマヒが治ったという報告はありません。「マヒを治す」という目標は立派でも、それをリハビリで実現する方法は未だに見つけられない、あるいはリハビリではそんな方法はないかのどちらかです。50年というのはそれを納得するには十分長すぎる年月ではないでしょうか?つまりセラピストが、見通しの立たない「マヒを治す」という目標に拘り続けることは、目の前の患者さんにとっても不利益ではないでしょうか?
だからこそ今、自分のこと、治療方略や治療技術のこと、そして患者さん自身とその障害のことについてよく知ることが大事です。マヒを治すことはできなくても、今より良い状態を目指すこと、そして良い状態をできるだけ長く維持することはできるのです。つまり勝つ(治す)ことはできなくても、負けない(良い状態にする・維持する)という状態を作り出すことがなによりも大切なのです。
孫子のこの言葉には続きがあり、自分の実力を知っていて相手の実力を知らなければ勝ったり負けたりし、両方の実力を知っていなければ負けるに決まっているということです。
そこで自分たちの持っている治療方略を一度見直して、その効果と限界を整理してみることは有用でしょう。そして運動システムの作動の性質と障害を持った運動システムの状態をよく知ることも有用です。こうして初めていつでも安定して、患者さんのより良い状態を目指すことができるのではないでしょうか?
このシリーズでは、僕たちセラピストの持っている治療方略の長所と短所、限界を明らかにして、障害を持った人とどのように協力していけば良いのかを探ってみたいと思います。そして新しいより良い状態を目指し、良い状態を維持するアプローチを提案できればと思っています。(「その2」に続く)