毎回5分で理解する「要素還元論」と「システム論」(その17)
前回までで、「基礎定位障害」という症候群が、原因や振る舞いそのものだけでは定まらず、その患者さん達が選択している問題解決によってまとめられる形で理解できると述べてきました。
では実際にどんな問題解決をとっているかを説明します。
原因はどうであれ、基本は重力と床の間で体の安定・安心を保つことが難しい障害です。それで以下のような問題解決が選択されます。
①不安な姿勢・動作を避ける、重心を低くする傾向
・座位から起立、立位になるときの動作開始に時間がかかる、躊躇が見られる
・座位から起立時の前方への重心移動の介助を嫌がる
・座位から起立への介助自体に抵抗される様子がある
・立位になってもすぐに座ろうとされる
・何度立位練習を経験しても、いつまでも立位に慣れない、ずっと怖がられる
・重度の場合は臥位から座位になることを嫌がられる、すぐに臥位に戻りたがる
②基底面を広げてバランスを保持しやすくする傾向
・立つ場合は、歩隔を広くする
・杖歩行は3動作歩行で常に2点が接地するようにする
・杖を遠くに突き、基底面を広げる
・坂道などにさしかかるとつま先と歩隔を広げ、基底面をさらに広くする
・T-caneより4点杖やT-cane2本使った方が安心される。また杖よりもピックアップや歩行器を好まれる
・手すりより壁の上部にすがる
・横手すりよりは縦手すりを好み、時に縦手すりにすがるように立つ
・介助者の手を持つより肩に手を置く(なるべく上の方を持って基底面を広く。体幹の揺れも小さい?)
③特定の状況に固執する傾向
・慣れた介助者なら立つが、初めての介護者だと警戒して尻込む、抵抗する
・トイレなどは慣れた場所を好む。新しい場所は拒否されたり躊躇されたりする
・慣れたセラピストと一緒なら、歩行練習もされるし、見た目安定して歩かれるようになるが、1人では決して歩こうとされない
④視覚情報に頼られる
・歩く時は下(床)を見ながら歩く。頭を挙げると不安?
・手すりを持って立っていても後ろ向きに下がるのは苦手。後ろに座るときわざわざ向きを変えて椅子を見て確かめることもある
⑤重心移動を小さくする傾向・体幹を棒のように硬くする
・小刻みに歩行する(通常脚の振り出しの周波数を上げてジャイロ効果を利用して安定させる)
「⑤重心移動を小さくする傾向」はパーキンソン症候群に特有・顕著で、問題解決が他の原因・疾患とは共通していないようにも見えますが、歩行補助具などで基底面を広げたり、より高い位置を持ったりの問題解決はやはり共通に見られると思います。
また時には片麻痺の方にも体を硬くして重心移動を小さくする傾向は見られます・・・実は筆者はまだ迷っているところもあります(^^;)
障害が新しく、まだ慣れていないなどで運動経験が不足して一時的に基礎定位障害が見られる場合は訓練を繰り返すことでこの症状は消えてしまいます。情報リソースのアップデートが必要というわけですね。
一方、小脳失調やパーキンソン、片麻痺の一部の患者さんにはこの改善しにくい基礎定位障害が見られ、筋トレやバランス練習などの身体機能の改善の方針では改善が見られないようです。
軽度の方では、訓練を続けると少しずつ慣れて、活動範囲を広げられる方もいますが、基本的には慣れた環境内で改善が起こることが多いようです。(前回挙げた極まれな積極的自立例はありますが)
根本的に治る様子は見られないので、CAMRでいう環境利用学習(手すりやトイレなどの環境調整とそれを使った繰り返しの成功経験)が適切だと思われます。次回は今回のシリーズのまとめ(最終回に続く)




※CAMRのFacebook pageの最新の記事
「過剰な情報と知識の中で」 https://www.facebook.com/Contextualapproach
※No+eの最新記事
「リハビリのセラピストはプログラム説がお好き?」
https://note.com/camr_reha
毎回5分で理解する「要素還元論」と「システム論」(その16)
前回は「基礎定位障害」の患者さんは、メンタリティ(精神状態)の影響を強く受けて振る舞いが異なることだと述べました。以下に三つの例を挙げます。
①失調症状が簡単に見て取れるのに、杖一本でバスに乗って出かける患者さんがいます。確かにめったに転倒はされないのですが、周りから見ると皆がヒヤヒヤしています。本人は自信に溢れ、やる気満々です。
②うまく止まれないので、壁や柱を目標に歩くパーキンソン患者さんがいます。決まった目標にぶつかって止まり、向きを変えて次の目標に向かってぶつかって止まっては、目的地まで移動されます。もちろん新しい場所ではダメです。いつもの移動コース上ならほぼ自立です。
③歩隔を広くとり、杖を遠くについて基底面を大きく広げて、ゆっくり移動自立している片麻痺の方がおられます。安定して歩いておられるので大丈夫だろうと思っていると、不意に転倒されることが多いのです。
しかも本人と話してもあまり転倒を気にされたり、恐れたりする様子もありません。何度転倒しても、何事もなかったようにまた歩き始めます。
それでデイケアでは、しばしば「転倒防止はどうすれば良いのか?」というテーマのカンファレンスが開かれます。急な方向転換やビックリしたときに転倒しているらしいことが分かります。
それで解決策は、「急な方向転換を様々に行う練習」や「様々な外的刺激に対してバランスの維持に対応する練習」などが提案されます。「ダンスなどが良いのでは?」などとアイデアが出されてスタッフ間で盛り上がります(^^;)そして実施されるのですが・・・・・一年後には相変わらず同じ問題でカンファレンスが開かれたりします(^^;)
基礎にあるのがどうも「基礎定位障害」なのです。重力と床との間で体を安定状態に保つのが難しいと思われます。そして、どうもこの障害はあまり改善しないようです。だから練習を重ねても変化しないことも多い。
上に挙げた方達は、皆それぞれに異なった原因の「基礎定位障害」を持っておられますが、それぞれに歩行は自立の状態にあります。もちろん環境に依存していますが。
一方で、前回まで述べたように杖をついて安定して歩いているように見えても一人では動こうとされず、歩行自立できない患者さんもいます。
つまりこの両者の違いはメンタリティの違いだと思います。「一人で歩きたい」などと強く思っていて一人で歩かなければならない状況があれば、何とか恐怖を乗り越えたり、慣れたりして障害をある程度克服していると思われます。決して「安全に」という条件はクリアしていないのかも知れませんが。
ただこのように自立に向かう人は少ないです。この人達を見て、他の人にも「できる人がいるんだから頑張れ!」というのは酷でしょう。
つまりここで言う「基礎定位障害」は、原因も異なれば、メンタリティの状態によってもその振る舞いが異なります。
だから一つの症候群として理解しにくい、まとめにくいところがあるのだと思います。いや、そもそも一つの症候群としてまとめる必要があるのか、と言われそうですね。
でも彼らが行っている問題解決のスキルに焦点を当てて見ると、共通していることがあります。つまりこの症候群、「基礎定位障害」は、患者さんが選択する共通の問題解決によってまとまるわけです。
次回は具体的にどんな問題解決をとるかをまとめて説明します。(その17に続く)
毎回5分で理解する「要素還元論」と「システム論」(その15)
前回に続き基礎定位障害の説明です。
前回は基礎定位障害が背景にあって、不安や恐怖から「立位介助の拒否」や「歩けるのに歩こうとしない」といった患者さんの例を紹介しました。
たとえば脳性運動障害によってこの基礎定位の働きが低下すると、立位や歩行時のバランスの悪さはもちろん目立ちます。しかし一見はっきりとしたバランス障害が見られなくても、基礎定位障害による立位・歩行時の不安定さから不安や恐怖を感じて、動こうとしない人もいるわけです。
この方達を「意欲の低下や振る舞いの問題」として捉えてしまうと、リハビリの方向性がまったくトンチンカンになってしまいます。
さて、今回は「基礎定位障害」の起こるメカニズムについて簡単に理解しておきましょう。以下のような原因が考えられます。
両下肢や体幹の筋力が低下すると、立位でのバランスが不安定になります。脳卒中後に弛緩状態があると姿勢を安定させたり、バランスを維持したりすることが難しくなります。
体幹の柔軟性が低下すると、歩行時、基底面から重心が飛び出しても立ち直りでバランスを回復することが難しいです。脳卒中後に体が硬くなると、歩行時のバランスや急な方向転換で倒れやすくなります。パーキンソン症候群では更に顕著です。
小脳性の失調症では筋の協調的な活動が失われ、姿勢が不安定になります。倒れやすく急な方向転換が難しくなります。手脚の動きもばらつき、不正確になるためバランスをとるために手すりをつかみ損ねてしまうこともあります。
また小脳性の失調では、眼球の協調が悪くなり視覚による姿勢コントロールが難しくなるのかもしれません。同様に視覚や前庭覚などの知覚障害によっても姿勢保持が不安定になります。
上記以外の原因もあると思います。これらの例によって、基礎定位の働きの低下、あるいは基礎定位障害となります。原因や障害の状態によって基礎定位障害の程度も予後も変わってきます。
また症状が改善するものも改善しないものもあります。小脳性の失調はあまり改善しないことが知られています。それ以外の原因としても急性期・回復期のリハビリを受けて、さらに老健に来られる「バランスの悪い、転倒傾向のあるような方」はどうもあまり改善しない傾向です。
この場合、セラピストがバランス改善や力強さなどの身体能力の改善にばかり焦点を当ててしまうと、いつまでも改善しないことが多いのです。これは患者さんに伝わります。いつまで経っても良くならないので、患者さんはますます自信を失って動こうとされなくなることもあります。
またさらにこの「基礎定位障害」を複雑にしているのは、患者さんのメンタリティ(精神状態)につよく影響を受けて振る舞いが個々の患者さんで大きく異なることだと思います。次回に続きます。(その16に続く)
※No+eに別のエッセイを毎週木曜日に投稿しています。よかったら見てください。https://note.com/camr_reha
毎回5分で理解する「要素還元論」と「システム論」(その14)
今回は「安心確保の問題解決」について説明します。
これも脳性運動障害では大きな問題となるテーマです。
人の運動システムのもっとも基本的な機能の一つは、この大地と重力の間で身体を安定・安心の状態にすることでしょう。しかもじっとして休んでいても動き回っていても常に体を安定・安心の状態に保ってこそ、不安や恐れなく、思い通りに動いて様々な必要な課題を達成できるわけです。この大地と重力の中で体を安定・安心の状態に持っていく働きを「基礎定位」と呼びます。
僕は理学療法士の最後の15年間以上を老健施設で過ごしました。その中で「麻痺はそれほど重くないのに、自宅ではなく老健施設に転所してくる方が多いな」と感じました。どうして麻痺が軽く、その他の明白な理由もないのに自宅に帰れないのか?
実は転所してくる利用者さんの前の病院の担当セラピストからの報告書には共通点が見られました。
たとえば「まだ立位や歩行バランスが悪い。歩行は可能だが、まだ自立までもう一歩。そちらの施設でもう少し歩行練習を進めて実用性を高めてほしい」といった評価が多いのです。
そしてその理由として明白な失調症状がある、または「支持性や姿勢反応に問題がある」といったものもありますが、その他多くのものは「この患者さんは意欲が低く、訓練を嫌がり、熱心に取り組まれない」とか「非常に依存的である。セラピストや介助者に甘えて自立への意欲が低い」などと評価されています。
なんだか「患者さん自身の意欲や振る舞いに問題があり、訓練が進んでいないから家に帰れない。意欲や振る舞いが改善して訓練が進めば家に帰れるだろう」といったニュアンスにとれるものが多いのです。
つまり「身体や運動システムの問題ではなく、意欲や振る舞いの問題である」と認識されているからでしょう。
実際にうちの施設に入所してからすぐに介護士や看護師から「立つのを嫌がるのよ。スゴイ力入れて抵抗するの。自分のペースで動きたいんですって」とか「口では『動きたい』といってるけど、『やって、やって』と甘えてくるし、杖で歩けるはずなのに独りでは歩こうとしない」といった評価を受けてしまいます。
訓練場面でも一生懸命に取り組まれますし、麻痺自体はそれほど重くなかったりもします。時には「今度から居室を独りで歩いて良いか?」などと聞かれるのですが、結局独りではまったく歩こうとされません。どうして歩かないかを聞いてみると、「今日は調子が悪かったので歩いていない」とか「うん、そんな気になれなくてね・・・」などと言われたりします。
これだけ見ると前の病院の担当者と同じように「意欲や振る舞いに問題あり」となりそうです。
でもどうも違和感があります。そこでもう少し丁寧に聞いていくと、「座っているときは大丈夫だけど、立ったり歩く時に違和感や不安のようなものがある」ということがわかったりします。中にははっきりと「独りで歩くとすぐに転けそうで怖い」とおっしゃる方もいます。でもとてもそんな風に、すぐに転けるようには見えないのです。
どうもこの背景には程度の差こそあれ「基礎定位の障害」があるのだろうと思います。立位のように狭い基底面で重心を高くする姿勢が不安を導くのです。
次回はもう少し詳しく説明します。(その15に続く)
毎回5分で理解する「要素還元論」と「システム論」(その13)
今回は「健康時の問題解決」について説明します。
脳卒中直後の患者さんは、身体が急激に大規模に変化したのですが、どのように変化しているかを認知していません。認知するためには、病気によって変化した身体を実際に使ってみるしかないからです。
脳性運動障害後にリハビリが最初に果たす重要な役割は、実際に簡単な運動課題を多様に提供して、患者さんに実際に体を使っていただき、変化した体の状態を理解してもらうことです。まずこれをしないことには課題を通しての運動リソースの豊富化も運動スキル学習も進みません。
そして様々な課題を実施する中で、平行棒内の車椅子に座っている脳卒中直後の患者さんに、「立ってみましょう」と声をかけます。患者さんは健側上肢で平行棒をつかみますが、患側上肢はまったく動かないことに気がつきます。それでわざわざ健側上肢で患側上肢をつかみ、平行棒の上に持っていくことはよく見られます。
健康なときは両手で平行棒をつかんで立ち上がろうとするはずで、それを再現しようとしているのです。これが健康時の問題解決です。
でも患側上肢は棒をつかむこともできずにだらんと下に落ちてしまいます。患者さんはそれでも2-3回それを繰り返してみますが、やがて諦めます・・・・このように健康時の問題解決は機能しないことが多いため、自然に消えてしまうのが普通です。
また「座ってみましょう」という課題を提案します。最初は介助して端座位になっていただきます。麻痺がある程度重くて初めて座られるときは、腕は水の重りのように体を患側へ引っ張るし、体幹の支持性も低いため患側へ倒れます。
元気な時は倒れそうになると両手で支えますので、そうします。そうすると麻痺側上肢はまったく動かず健側上肢だけで床を押すためにまるで自分から倒れ込んでいるように見えます。いわゆるプッシャー・シンドロームと言われる現象です。
従来はそれを見て、視知覚や固有感覚の異常などと症状として理解されています。
ただ患者さん自身の立場から見るとまだ障害後の身体・運動の状況を理解しておられません。一生懸命に元気だった頃の問題解決を行っておられるだけです。つまりこれも「健康時の問題解決」ということになります。
通常これも機能しないため、普通は自然に消えてしまいます。しかしある条件が重なると消えません。
一つはセラピストが「『まっすぐ』に座りましょう」といった課題を出すときです。患側は水の重りになっているのでまっすぐに座ることは困難なのですが、セラピストが「姿勢運動の正しさにこだわる」(「正しさ幻想」と呼んでいます)とこのような無理な課題を出し続けます。
もう一つ、患者さんの方もたまたま生真面目な方だと、「まっすぐに座れ」と言われるままに座ろうとします。しかしそのためのやり方が分かりません。それでひたすら両手で支えようとする健康時の問題解決を繰り返します。患者さんの方も素直で、また健康なときのようにまっすぐに座ろうとする傾向が強いといつまでもこれを続けます。
本来健康時の問題解決は機能しないので、変化した身体に適応した新しい方法を見つけることが重要です。セラピストはまず様々な運動課題をやっていただいて身体の状態を理解していただくこと、それから変化した体で課題達成するための新しい方法、運動スキルを患者さんと一緒に探していくことが重要になります。
そのために課題の出し方は、「まっすぐに座りましょう」ではなく「座れるようなやり方を探してみましょう」に変更します。普通は健側に体幹を傾けて健側上肢で支えるようなやり方を介助してまず座っていただくことです。これを何度も繰り返すと患者さんは自然に体の使い方を発見して次第にまっすぐに座れるようになられます。
つまりプッシャー・シンドロームは「正しさ幻想」を持っているセラピストと素直な患者さんが協力して創り出した虚構の障害像なのだと思います。
次回は「安心確保の問題解決」について説明します(その14に続く)
※現在、No+eで、異なったエッセイを毎週木曜日に投稿しています。呼んでいただけるとありがたいです(^^)「カムル」という名前で投稿しています。
毎回5分で理解する「要素還元論」と「システム論」(その12)
今回は「骨靱帯性問題解決」の説明です。
これも外骨格系問題解決と同じように、弛緩状態あるいは筋の張力が低下しているときに支持性を得るためのスキルです。主に骨同志あるいは骨と靱帯による制限を利用して支持性を得ようとします。
具体的な例としては、「反張膝」や脳性麻痺の両あるいは四肢麻痺タイプで両大腿骨を内転し、一つの塊として安定させるなどが見られます。
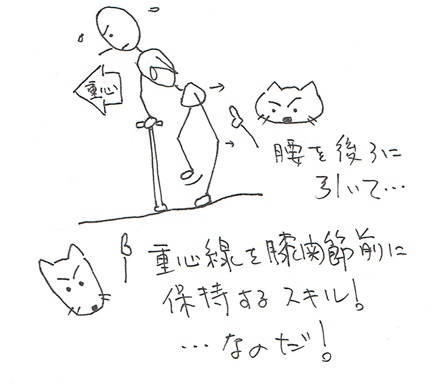
反張膝は脳卒中後に立ち始めたとき、筋力低下により膝関節での支持性が低下しているので、骨と靱帯の制限を利用して膝の過伸展位で支持性を得るようなやり方です。
最初は不安定で、膝折れが見られたりします。特に下り坂や踵だけが敷居の上などに乗って荷重したときには、膝折れで転倒が見られたりします。
つまり膝関節の軸の前に重心線が維持されているときには反張膝が固定され、支持できるのですが、重心線が関節軸の後方に移動すると簡単に膝折れが起きるわけです。
しかしそのうちに凹凸のある路面でも、体全体を使って重心線が膝の前に維持され続けるような運動スキルを身につけるようになるので、常に反張膝で立位保持や歩行をするようになります。
こうなると非常に頑固で、反張膝歩行から抜け出すのは困難です。
反張膝歩行は、健常な幼児期の女児にもよく見られたりしますが、多くの場合、成長や日々の生活の中で筋力が多様に改善してくると反張膝は見られなくなり、いわゆる膝関節をわずかに屈曲した半伸展位の膝の支持の仕方に変わってきます。
筋力が十分な強さで多様な状況でもコントロールできるようになると、骨靱帯で支持性を得るよりも圧倒的に有利となります。それで、運動システムは自然により安全・より効率的な課題達成のための運動スキルに自然に切り替わります。 しかし脳性運動障害では、筋力が十分に改善しないため、なかなか骨・靱帯性問題解決の依存から抜け出すのは難しいのです。
実際、骨・靱帯性問題解決は、支持性を得ることにもある程度の環境変化にも反張膝を維持する全身性の運動スキルによって対応できるため、家屋内の日常生活課題達成では問題がないと言えばないのです。
しかし患側下肢で支持するときに股関節を後方に大きく動かす独特の歩容やぎこちなさ、不意の大きな路面変化に対応しにくいなどの問題はついて回ります。 これを防ぐには支持性のない運動障害直後から、外骨格系問題解決を促してある程度強めることは有効です。膝半伸展位で支持ができるようになるし、ある程度の不意の路面変化にも対応できるようになります。骨・靱帯性の問題解決よりは環境変化に対する対応性が高いと思われます。
さて、次回は「健康時の問題解決」について説明します。(その13に続く)
毎回5分で理解する「要素還元論」と「システム論」(その11)
前回不使用の問題解決で述べたように、片麻痺患者さんの患側下肢は早くから適切な課題と介助、装具などを用いて外骨格系問題解決を促すようにします。そうすると弛緩した下肢に硬さが生まれて体重を支持し、歩行ができるようになると説明しました。
しかし以前に述べたように外骨格系問題解決は、ブレーキが効かないで繰り返される危険があって、やがて過緊張などの偽解決状態になってしまうかもしれません。それなのに外骨格系問題解決を促して良いのか、と疑問に持たれる方もいると思います。
結論から言えば、外骨格系問題解決が過剰に繰り返され、偽解決状態に陥るのを防ぐには、できるだけ多彩な運動と豊富な活動量を維持することでそれが達成できます。
まず外骨格系という問題解決がどうして起きるのかを考えてみましょう。脳性運動障害直後には、麻痺の領域は弛緩状態になります。筋は弛緩して緩むだけではなく、弛緩の領域は可動性のある骨格が水の袋に入っているような状態になります。
つまり水の袋として体からぶら下がった重りのようなもので、姿勢を保持したり動いたりすることを大きく邪魔するのです。
これでは動けないのでともかく硬くする必要があります。硬くなって健側の体と一体になれば姿勢の保持も楽にできます。また健側で引きつけてコントロールが容易になります。
外骨格系の問題解決に頼るのは、弛緩状態があるから何とか硬くしようとするわけです。逆に麻痺の回復に伴って筋活動が増えたり、日々多彩に、活動的に動いたりしていると筋が活性化され、外骨格系の問題解決に依存する程度が減ってくるのです。
つまり動くこと自体に、過緊張を歯止めする働きがあるようです。これは以前の理学療法士・作業療法士などはよく知っていたことです。
というのも現在と違って、以前はひとりの脳卒中患者さんを入院から外来へと継続的に何年も観ていくことは普通のことでした。そうすると以下のようなことが分かってきます。
・退院後硬くなる人は、動かない人。下肢の尖足や上肢の屈曲も悪化した
・病院でよく歩いていた患者さんが、寝て過ごしていると尖足が強くなる
・毎日廊下を歩くことを習慣にしていたが、徐々に徐々に硬くなり、歩行のパフォーマンスも低下した
・「そんな歩き方をしていると変形が強くなる」(尖足での分回し歩行)などと言われた患者さんが1年くらい山歩きなどをしていた。イノシシ狩りが大好きで、狩に参加したいと普段から山歩きをされていた。結局、尖足変形も観られなくなり、麻痺側の下肢もより動くようになり、歩行のパフォーマンスも改善した。
・入院中から分回し歩行をしていた患者さん。周りから「危ないから」と止められても聞かずに、草刈りなどの農作業を続けたが、やがてより対称的な歩行でパフォーマンスも改善した。
結局動こうが動くまいが、運動システムの背景では外骨格系の問題解決は繰り返されていると考えられます。寝ていたりワンパターンの運動のみしたりして、つまり筋活動の種類や筋活動量が不十分だと次第に外骨格系問題解決の作動が優位になり、柔軟性は低下し、更に過緊張が生まれてくるようです。
逆に多様な活動、多様な環境での歩行をしている人は、複雑な地面の起伏やうねりに対応して、多様な運動スキル学習を進め、結果的に筋力や柔軟性などの運動リソースを豊富化していると考えられます。そして筋の活動量がアップし、外骨格系問題解決への依存が減ったのだと考えられるのです。
結論としては弛緩状態の時には、外骨格系問題解決は必要です。だからそれを促します。でも支持性が出てきたら、できるだけ多様な環境や運動課題で、運動リソースを豊富化し、更に多様で柔軟、創造的な運動スキル学習を行うことで、日常生活課題の達成のパフォーマンスは改善しますし、結果的に外骨格系問題解決の偽解決状態を防ぐことにもなるのです。
次回は「骨靱帯性問題解決」の説明を行う予定です。(その12に続く)
毎回5分で理解する「要素還元論」と「システム論」(その10)
問題解決スキルの三つ目は、「不使用の問題解決」です。これは文字通り、「使わないこと」で問題解決を図ろうとするスキルになります。
そしてこれは「外骨格系問題解決」のようにたくさんの誤解を生んできました。
たとえば脳卒中直後には患側下肢が弛緩状態で支持性がありません。こんな時に立ち上がると麻痺側下肢は体重を支えるどころか、体幹から重い水の入った細長い袋のようにぶら下がって、立ち上がり、立ち続けることを困難にします。
そこで運動システムは問題解決を図ります。残った神経-筋システムや他の筋肉を硬くするメカニズムの活動を高めて、重い麻痺側下肢に引っ張り負けないように患側下肢全体を収縮します。患側下肢の屈筋群を外骨格系問題解決の手段で硬くするのです。
この問題解決が強くなると次第に下肢に「屈曲共同運動」とこれまで呼ばれてきた現象が見られます。そして屈曲共同運動は一般に脳障害の症状の一つの状態として理解されます。すると「屈曲共同運動は抑制されねばならない」などという方向に進みます。
しかしCAMRでは、これは問題解決であろうと考えています。患側下肢の弛緩状態では水の入った細長い袋として体幹にぶら下がってしまいます。そして体幹を患側の下方へ引っ張ります。これでは健側の片脚で立とうとしても無理なので、患側下肢全体を硬くして体幹に引きつける、つまり重心を体幹の健側に寄せることで健側片脚での片脚立ちが可能になるわけです。
更に弛緩した下肢で体重を支えようとすると倒れてしまいますので、敢えて支持には使わないことで何とか健側下肢での片脚立位状態を達成するのです。
むしろ下肢に硬さが生まれる前から、セラピストの適切な介助や課題設定、装具などを用いて患側下肢で荷重練習を繰り返すと、患側下肢には硬さと支持性が生まれてきます。つまり患側下肢の伸筋群の外骨格系問題解決を促して患側下肢の支持性を高めながら、それが機能的な意味や価値があると運動システムに教えてあげるわけです。
そうすると硬くなった患側下肢を使って立ったり、歩いたりされるようになります。
それでもさらに適切に対処しないと、患者さんは患側下肢をできるだけ使わないようにします。やはり健康なときとは違う下肢の状態に不安を感じるのです。
それでたとえば健側下肢で主に立ち、患側下肢は補助的に体重を支えたり基底面を広げたりするためという補助的な使い方をします。歩く時も患側下肢はできるだけ最低の荷重で歩いたりされます。健側下肢に比べて患側下肢で支える時間が極端に短くなって、左右の非対称性が明確になったりします。つまり不使用の傾向は軽くなっても続くわけです。
でも外骨格系問題解決の支持は意外にしっかりしています。もっと十分に使うことを促すと、立位や歩行の左右差は小さくなります。
上肢にも同じような不使用の問題解決は見られます。
たとえば患側上肢は不自由ながら動くものの菓子パンの袋を開けようとすると、どうしても両手でうまく開けることができません。できたとしても時間がかかります。そうすると健側上肢で袋の片方を持ち、もう片方は口でくわえて開ける方が効率的です。つまり探索利用スキルを用いるわけです。そうすると自然に患側上肢の不使用による問題解決が通常のやり方になってしまいます。
不使用の問題解決は、探索利用スキルを伴って上肢の重度の麻痺では当然第一の選択肢になります。健側手だけあるいは口や脇、補助具などを使った方が生活課題を実用的にストレスなく達成できるからです。
しかし中には練習によって十分実用的なレベルになる患側手が使われないままになることがあります。これはやはり本来十分にあるいは補助手として使えば生活課題達成のパフォーマンスが上がるのにその可能性を潰してしまうという意味ではやはり患者さん本人に不利益をもたらす偽解決状態になります。
もし実用的に使える可能性があれば、健側拘束法などのアプローチを使ってみるのも一つの手でしょう。この場合、セラピストの経験と観察眼が重要になります。
一方患側下肢については、上述のように適切な課題と介助、装具などを使って、患側下肢の伸筋群の外骨格系問題解決を促し、下肢の支持性を高めて実用レベルに持っていくことが可能です。これはほとんどの患者さんで実用レベルの達成が可能です。
ところがもしこの患側下肢の屈曲パターンを「症状」として見做してしまうと、「屈曲共同運動を抑制しなくてはならない」などと変な方向に進んで、いつまで経っても立ったり歩いたりできなくなってしまう例をたくさん見てきました。
こうなると大変です。理解の仕方次第、つまり「症状」か「問題解決」かという理解の仕方次第でアプローチが大きく変わり、結果も大きく変わってしまうのです。
さて次回は、また外骨格系問題解決に戻って、もう少し考察を深めてみます。(その11に続く)

毎回5分で理解する「要素還元論」と「システム論」(その9)
前回は外骨格系動物のように体を硬くする問題解決が、脳性運動障害後の弛緩した体で動き出すためには必要だと述べました。しかし外骨格系問題解決は、筋緊張の亢進を直接抑制するメカニズムがあるわけでもないので必要以上に繰り返され、硬くなりすぎて動きにくくなり痛みなど新たな問題が生まれやすいのです。
そして伝統的に、伸張反射の亢進や筋肉が硬くなることは、ジャクソンが陽性徴候として分類した「症状」として考えられてきました。
それでこの硬くなりすぎて動けないとか、不快感や痛みとなって苦しいとかいう現象が、脳性運動障害における「主な症状」として誤解されることが続いてきました。
というのも脳卒中後の片麻痺や脳性麻痺の患者さんの中で、比較的軽~中等度の方に対して上田法のような徒手的療法を実施すると、運動範囲や重心の移動範囲が広がり、動きが大きく速くなり、また「楽に動ける」という患者さんの主観的意見として聞かれることも多いからです。
それで「やはり硬くなりすぎることが正常な運動の出現を邪魔していたに違いない」という大きな誤解を生んだのではないかと考えられます。
しかし一方で、重度麻痺の方の過緊張が低下すると、より弛緩状態が明確になります。中等度麻痺の方でも、ボツリヌス療法で緊張が低くなりすぎると支持性がなくなり、歩けなくなったりもします。
そもそも脳卒中の発症直後は麻痺の領域は弛緩状態です。脳性麻痺でも新生児から数ヶ月は弛緩状態で過ごします。その後末梢の方から硬さが生まれてくることが多いようです。
だから脳性運動障害の症状の実相はジャクソンの言う陰性徴候、つまり弛緩麻痺だろうと思います。前回外骨格系問題解決で説明したように、弛緩状態では動けないので身体にある筋肉を硬くするメカニズムを総動員して筋肉を硬くし、支持性や運動に利用していたわけです。だから硬くなることは、障害後に運動システムが選んだ弛緩状態に対する問題解決と考えられます。
そして、硬くなることは障害後の運動システムの作動なので、過緊張は上田法のような徒手療法やお湯につけることで改善されるわけです。症状であれば、お湯につけたくらいで改善・消失する症状というのは変なことです。障害後の運動システムの作動だからこそ変化するのでしょう。(特にここでよく取り上げるキャッチ収縮はタンパク質による現象で、体温以上に温度が上がると解けることが分かっています)
ちなみに上田法で過緊張を落とすとクローヌスなどの伸張反射の亢進が見られるようになります。過緊張状態はキャッチ収縮など筋の粘弾性プロパティの変化が前面に出ている状態で、背景では筋の収縮を高めるために伸張反射の活動亢進は続いているのでしょう。
もし「必要以上の硬さは、外骨格系問題解決の偽解決状態である」ということを理解していれば、軽~中等度の麻痺で、過緊張を落とすと動きが良くなる現象は、過緊張の改善によって偽解決状態を改善していると理解できるわけです。単純に過緊張を改善して「脳性運動障害の治療をしている」と考えていると、治療はそこで止まってしまいます。
実際にはどんな障害にしろ、運動リソースを増やして運動スキルを多彩に柔軟に創造的にする運動学習は必ず必要です。それこそが運動システムの状況性という優れた特徴を生み出す基であるというのは、このシリーズの「その3」で述べた通りです。
それで筋肉が硬過ぎる、つまり過緊張を改善した後、運動リソースを豊富にし、運動スキル学習まで進んで初めてリハビリの治療と言えます。硬さを改善しておしまいということではありません。
また他の問題解決でもこの「偽解決状態」という問題がついて回ります。このことを良く知って偽解決状態についてよく学んでおくことが脳性運動障害を理解する鍵になります。
次回は「不使用の問題解決」について説明します。(その10に続く)
毎回5分で理解する「要素還元論」と「システム論」(その8)
CAMRでは「自律的問題解決」は6種類に分類していますが、今回はその2番目の「外骨格系問題解決」です。(6分類はこのシリーズの「その6」に挙げてありますので参照してください)
「外骨格系問題解決」は「筋群を硬くして、支持性や固定性を得る」という問題解決スキル全般を指します。
たとえば腰椎ヘルニアで疼痛が起こると、圧迫部分と反対に脊柱を反らせて逃避性に側彎を起こします。またその側彎状態を維持するため体幹全体を硬くして、動きが出ないようにします。
また脳卒中後には、麻痺の領域は弛緩状態になります。弛緩状態というのは、筋肉が緩んで可動性のある骨格が水の袋に入ったようになります。水の入った袋を机の上に置くと重力に押されて安定するまで広がってペタッと机に貼り付いたようになります。体もちょうどそんなイメージです。
これでは動けなくなりますが、やはり動物なので動くための問題解決を図ります。つまり身体の内外に利用可能なリソースを探ります。そして筋を収縮して硬くする伸張反射やいわゆる錘体外路系の筋収縮のメカニズムを過剰に働かせたり、筋肉内にあるキャッチ収縮のようなメカニズムを優位に働かせたりするのです。
大きく見れば、「探索利用スキル」のうち「筋群を硬くするメカニズムという身体リソースを利用」して体を硬くしている訳で、探索利用スキルの一種とも言えますが、ここではこれを独立して分類しています。それだけこれは重要で頻繁に利用されますし、大きな誤解も生みやすい問題解決だからです。
そして甲殻類の昆虫やカニのような外骨格系動物のように体を硬くして、支持性や固定性を得るので「外骨格系問題解決」と名付けられました。そしてこの外骨格系問題解決は、脳性運動障害では一番多く見られる問題解決です。
ジャクソンは脳性運動障害の症状を「陰性徴候」と「陽性徴候」に分類しましたが、このアイデアでは、脳性運動障害の元の症状は弛緩麻痺、つまり「陰性徴候」だけだと考えられます。陽性徴候とした原始反射の亢進や過緊張は、運動システムが弛緩状態から動き出すために筋肉を硬くするための試み、つまり問題解決の現象だと考えられます。
実際上田法などの徒手的療法やボトックスなどによって、過緊張状態が低下すると露わになるのは弛緩状態です。症状のうち硬さなどの陽性徴候だけが消えてしまうのは妙な話です。これも陽性徴候は、弛緩状態から抜け出すために運動システムが障害後に選んだ問題解決の作動と考えると、陽性徴候だけが改善するのも納得できます。
また過去にはこの外骨格系問題解決は大きな誤解を生んできました。いわゆる「過緊張が正常な運動の出現を邪魔している」というアイデアが広まっていました。日本脳性麻痺学会などでも常識のように発表されたりしていました。(もちろんその頃から反対意見もありました)
確かに過緊張状態のある軽度~中等度の脳性運動障害のある方の過緊張状態が低下すると、運動範囲が広がり、動きがスムースになることはよく経験されます。やはり「過緊張がよりスムースな運動の出現を邪魔しているではないか!」と言われそうですが、これはCAMRでは問題解決に伴う「偽解決状態」として説明ができます。
つまり弛緩状態から動き出すために筋肉を硬くするわけですが、これらのメカニズムは健常の神経-筋システムのようにうまく調整されている訳ではなく、障害後に動員され、繰り返し使われている訳です。調整がうまく行かず、繰り返され次第に硬くなりすぎてしまいます。
そうすると元々弛緩状態を改善するために硬くなったのに働き過ぎて硬くなりすぎ、運動範囲を狭め、運動速度を低下させます。更に硬くなると動くために大きな力が必要になってかなりの努力が必要で発汗や発熱を伴うこともあります。更に更に硬くなりすぎると動けなくなり、不快や痛みなどの感覚が常に伴ったりもします。
このように元々解決策だったものが、新たな問題を生み出すことを「偽解決状態」と呼びます。
弛緩状態の体にとって硬くなることは、支持性を生み出し、必要なことではあるのですが、強くなりすぎると逆に本来持っている運動の出現を妨げる原因にもなります。
こうして「過緊張が正常運動を妨げる原因であり、脳性運動障害では過緊張を改善することが主なアプローチである」などという誤解を生んでしまうのです。 この辺り詳しく説明すると長くなるので次回に述べます。(その9に続く)