人の運動を「正しい」とか「間違っている」と言えるか?(その2)
「その運動は間違っている」というセリフにずっと悩まされてきたものだ。最初は実習地だった。臨床実習の指導者は、「その歩行は分回しという代償運動で良くないから、修正してあげなさい」みたいなことを言う。 その頃は僕もまだうぶだったので、素直に言うことを聞いたものだ。「代償運動は本来の正しい運動ではないから、間違った運動で悪いものだ。だからリハビリの専門家として、本来の正しい歩行のやり方を教えなくてはいけない」と素直に思った。
どうするかというと、「まっすぐに脚を出してください」とおよそ達成不可能な課題を出すわけだ。患者さんも最初は素直に「おお、その方が良かろう」と思われるのだろう、一生懸命にまっすぐに振り出そうとされる。しかし、元々できないから分回しだ。そうするとうぶな僕は一生懸命に修正しないといけないと思い、頻回に「まっすぐに、まっすぐに、まっすぐに!」と指示を繰り返すことになる。
そうするとそのうちに患者さんが爆発する。大きな声で、「やかましい!わかった!お前の言う通りまっすぐに出しちゃろう!だがその前にこのわしの不自由な脚を治せ!脚が悪くて思うように動かせんのじゃ!まっすぐに出そうと思うのにまっすぐに出せん!どうせえ言うんじゃ、わりゃあ!」と怒鳴られて立ちすくんだものだ。(「わりゃあ」は「お前」という意味の方言。この夢はそれ以来時々見るようになって、今でも見ることがある(^^;))
なるほど、言われることはもっともなことである。元々脚が動かないからそうしているのであって、口で指示したくらいでできるなら問題にもなっていないはずである。
そこでまた臨床実習指導者に質問することになる。すると実習指導者も「当たり前だ!口で注意するくらいでなんとかなるものか!お前は思った以上にバカだな!こうするのだ!」と以下のような理屈を説明してくれる。
患者さんの下肢が思うように動かないのは、姿勢が悪かったり、筋緊張の不均衡があったり、立ち直りなどの姿勢反応が弱まったりしているせいである。だから正しい姿勢を指導したり、臥位で立ち直り反応の促通をしたりするのだ。良い姿勢で立ち直り反応が改善すると筋緊張の不均衡も改善して、きれいに患側下肢が振り出せるようになるのである!
「どうだ!参ったか!!」実習指導者は口ではなく、態度でそう示してきた。僕は思わず「おお!おおっ!なるほど、なるほど!」と思い、「参りました!」と心のなかで呟いた。
そして見よう見まねで実習指導者のやっていることを必死に真似したものである。それで何か変わったかと言えば、何も変わらなかった・・・(^^;)
実習指導者曰く、「お前はまだまだ技術が未熟である。これからもっともっと修行をしなくてはならん!」と老師風に諭す。
僕は思わず、「はっ!はっ!ははっ!」と心の中で答えた。「俺は・・・俺はとんでもない未熟者である!だから必死こいて修行しなければならんのだ!・・・ならんのだ!」
今思えば僕もうぶであった。何とか頑張ろうとしたが、結局自分でも何をどうやれば良いのか全然わからなかった。
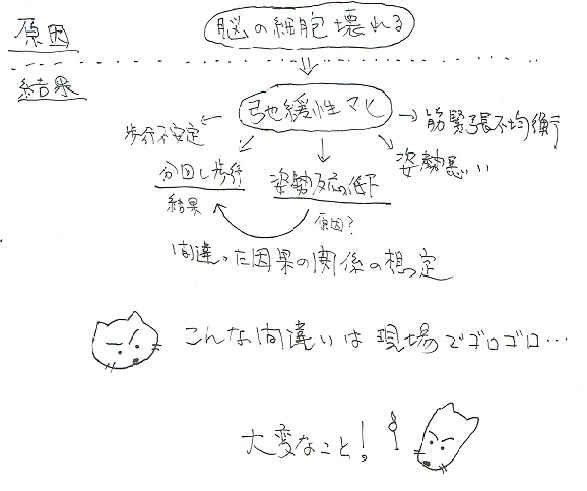
それに後から考えると、姿勢が悪かったり、筋緊張の不均衡があったり、姿勢反応が弱まったりしているのも結局は、脳細胞が壊れて弛緩性マヒが出ているからである。つまり力が出ないからだ。だから姿勢が悪くなり、筋緊張が不均衡になり、姿勢反応が弱まるのだ。だからマヒ側の脚も振り出せない。
やややっ、あの実習指導者、結局、因果の関係を間違っているではないか!原因は脳細胞が壊れてマヒになったことである。その結果、姿勢が悪くなったりしているし、脚も振り出せなくなっている。仕方なく患者さんは、健側の上下肢や体幹を使って何とか患側肢を振り出しているのでそれが「分回し歩行」となっている。
「姿勢や姿勢反応が悪いから脚がまっすぐでない」という理屈は、結果同士の間に間違った因果関係を想定しているわけだ。
こんな簡単な理屈は学校で習いたかった。そうすれば実習地であの指導者に馬鹿にされることもなく、逆に「因果関係の想定が間違っていますよ」と言い返せたのに。
しかし意外にもこんな簡単な間違いや誤解が臨床ではゴロゴロしているのである。 大変なことである!(その3に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!



人の運動を「正しい」とか「間違っている」と言えるか?(その1)
最近は減ってきたが、テレビなどでは「今日は正しい歩き方を教えていただくために理学療法士の先生に来ていただいています」などという企画がよくあった。
僕は色々な意味で興味津々で見てしまうのだが、大抵「胸を張って前を見て、腕を大きく振り脚も大きく振り出すのだ」みたいに指導している。
やはりそんなことかと思う。もし僕が司会者なら次のように言うところだろう。
「あ、なるほど。若者のような颯爽とした歩き方ですね。では上り坂になるとどうなるのでしょう?もっと急な上り坂なら?今度は下り坂なら?凍った路面での正しい歩き方はどうなりますか?水田の中では?真夏の炎天下では?・・・・・なるほど、なるほど!正しい歩き方というのは、形ではなくて状況変化に応じて適切な歩き方を選ぶことなんですね」
しかしどうして世の中はこんなにも正しい歩き方や正しい姿勢を求めるのだろうか?そして一体何が正しいのか正しくないのか、一体誰が決められるのだろう?
そう言えば正しい運動や作動がはっきり明確なものがある。それは機械である。機械では設計者の意図通りに動くことが間違いなく「正しい運動」である。 たとえばオモチャの歩行ロボットは正確に左右の脚を一定のリズムで振り出していく。平らな床面におくと、正確に同じ運動を繰り返して歩いて行く。
もし何らかの部品が壊れて左右対称に脚が出ないとバランスを崩して転倒し、歩けなくなってしまう。機械は予め決められた運動が正しい運動であり、それ以外の運動は故障などが原因の悪い運動、間違った運動である、と言えそうだ。
それでふと気がついたのだが、西欧文明の根底には、人は神(又は自然)が作った機械であるという「人間機械論」という思想があるらしい。デカルト以来の伝統などと言う人もいる。そう言えば昔読んだデカルトの「方法序説」の中に、人の頭の中にある松果体は神との連絡装置であるみたいな記述があって(あやふやで申し訳ない(^^;))「やややっ、ロボットみたいで格好いい!」なんて思ったりしたことがあった(^^;)
なるほど!人が機械であると無意識にでも考えているのなら、機械には設計者の意図した正しい運動、作動があるわけで、それを目指そうとするのは自然な考え方なのだろう。
西洋医学は、「悪いところを探して治す、元に戻す」という方向性を基本的に持っている。最近では治せない臓器は移植によって元に戻そうとする。
そして「悪いところを見つけて治す、交換する」というのは機械の修理方法そのものではないか。治して元に戻すとすると、当然元の(健常者の頃の)正しい歩き方に戻そうとするのだろう。だからマヒも治せないのに、目標だけは「正しい、健常者の様に」と思ってしまうのかもしれない。意識はされなくとも学校教育の影響もあるのではないか?
まあ、色々考えると大変なことである!(その2に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
状況を変えてみることの大切さ
ここでも再々紹介しているが、「新生児歩行の消失」は一般に脳の未成熟と説明される。
つまり生まれてまもなくは脳が未成熟で、脊髄レベルの原始反射である新生児歩行が見られるのである。しかし数ヶ月すると脳が成熟して、原始反射である新生児歩行を抑制するので消失するのだ、と。なるほど、確かに上手く説明しているように見える。
しかし新生児歩行の消失した乳児をお湯に浸けると再び新生児歩行が生じるので、脳の未成熟の説明はおかしいということに気がつく。
それで色々調べて見ると実はその時期、下肢の脂肪が急激に増えて,下肢重量の急激な増加で相対的な筋力低下が起きる。それで下肢が持ち上がらなくなることが消失の原因だとわかるわけだ。
つまり一つの現象は,このように異なった状況で観察してみるとその実相が見えてくることが多い。
たとえば立っていると患側下肢を屈曲して持ちあげ、健側下肢だけで立っている片麻痺患者さんに出会う。従来なら「屈曲共同運動が出現している」などと評価し、「それを抑制するのだ」などとセラピストの手足を使って抑えつけようとしたりする。だがなかなかうまく行くものではない。まあ、ともかく従来の見方で言えば、陽性徴候である「屈曲共同運動が強い、下肢の屈曲筋の緊張が強い」などと言われてしまう。
しかし少し状況を変えてみよう。
患側下肢に訓練室に転がっているプラスチック製の短下肢装具を装着してもらう。合わないところは布やスポンジを当てて足関節をともかく安定させる。
そうしてそれで立っていただき、装具を装着した患側下肢で荷重練習を一瞬していただく。そうすると先ほどまでしつこく出ていた「屈曲共同運動」なるものがまったく見られなくなる。
そうなると解釈はまったく変わってくるものだ。患者の患側足関節には、内反があるためきちんと荷重・支持ができない。つまり患側下肢に荷重しようとするとうまく支持できないので転倒の危険性がある。それで患者さんの運動システムは、患側下肢を使わずに引っ込めていたのではないか? CAMRではこれを「不使用の問題解決」と呼んでいる。使うと転倒の危険性があるので不使用の問題解決を図ったのではないかというわけだ。
この例でも状況を変えてみることで現象の異なった面が見えてくるわけだ。
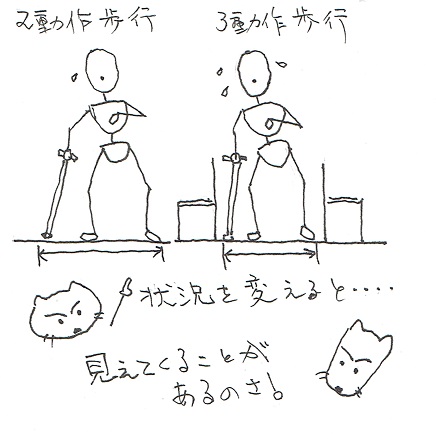
片麻痺の方が杖でゆったりとした大股での2動作歩行をしておられる。一見非常に安定していてうまく歩かれているように見えるが、実は家や施設で再々転倒を繰り返されていることが問題になっている。
担当セラピストは、「歩行にはあまり問題がないので、むしろ注意力の低下があって周りのちょっとしたものや段差に気がつかないのではないか」などと仮説を立ててみる。とは言え「では,どうするの?」と聞いてもあまりパッとした解決策が見当たらない。
こんな時は状況を変化させる、つまり異なった環境や状況内で歩いていただくとまた異なった面が見えてくるものだ。
たとえば屋外、階段、坂道、狭い通路などである。そうすると歩行における問題が明確になってくる。たとえば狭い通路に入った途端、杖と両脚で広くとっていた基底面がとれなくなり、それまでのゆったりした2動作歩行が3動作歩行になる。
つまりこの方は基底面を広くとって重心が基底面内からでないようにして歩かれていたことに改めて気がつくわけだ。基底面が広くとれないと、今度は3動作歩行で,常に2点で支えることで基底面を少しでも広くしようとされていることがわかった。
それでこの方は安定して歩くためにはかなり広い基底面が必要であることに気がつく。
CAMRでは基礎定位障害と呼ぶ片麻痺の障害群がある。重力と床の間で姿勢や重心を安定させることが苦手だ。そのために体をうまくコントロールできない。基礎定位障害が軽度であれば、平らな床上であれば、杖と両脚で基底面を広くとり、重心がその中から出ないようにしてうまく歩くことができる。しかし段差や階段、坂道では途端にコントロールが難しくなり、転倒しやすくなる。
それで漸く、この方が安定して歩くためには、かなり広い基底面が必要であることに改めて気がつく。しかも色々通路を工夫して変化させて見ると、横方向への広さが必要であることもわかってくる。そうすると横方向に基底面が広くとれない場所では、手すりや壁、家具などを利用してしっかりと安定性を確保することが重要であることがわかる。
以上のように状況を変えてみることでわかってくることもあるので、歩行をはじめとした運動評価には状況変化の項目が必要なのである。(終わり)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「悪いところを見つけて治す」以外の発想(その7:最終回)
「運動スキル」とは「身体の内外に利用可能な運動リソースを探し、試して必要な運動課題を達成するための運動リソースの利用方法」のことである。
この運動スキルを生み出す能力によって人は様々な状況変化に適応的に対応して、できるだけ相応しい運動を生み出そうとする。もちろんこれまで述べたように、毎回同じ運動を生み出せない構造であるから、異なった条件下で同じ結果を生み出すための非常に難しい運動コントロールが要求されるわけで、その結果身につけられた能力とも言える。
私たちが氷の上でも、砂の斜面でも、水田の中でも、平均台の上でも何とか二足歩行を維持できるのは、この「運動スキル」を生み出す能力が、その時、その場で利用可能な運動リソースを探し出し、それらを利用して課題達成の方法、運動スキルを生み出し、修正していけるからである。
たとえば氷の上では何度もこけるかもしれないが、その度に滑らないように重心移動するやり方を生み出し、修正して、たとえばヨチヨチと小刻みに歩けるようになるわけだ。あるいは脚を持ち上げないで、片脚ずつ前に滑り出すようにして移動するようになったりして適応する。
この「状況変化に適応した運動を生み出す能力」がまさしく「運動スキルの創出力」である。
もし運動リソースが豊富である、たとえば筋力や柔軟性、体力が豊富で、身の回りの状況がよく把握され、自分の身体と環境の相互作用の結果について確かな情報リソースが十分であれば、生み出される運動スキルも多様になり、より適応力を高めていくことになる。
こうすると「悪いところを探して治す」以外の方向性が明確になる。つまり人の運動システムの一般的な性質として、運動リソースが豊富で、運動スキル創出力が十分に働けば、適応的に運動を変化させる能力は向上し、生活課題達成力も改善するわけだ。
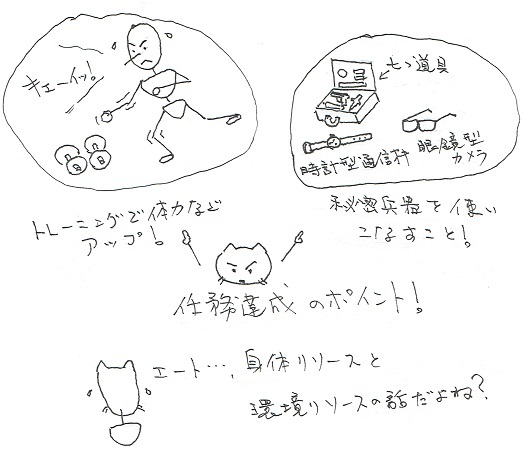
だからまず運動リソースをできるだけ豊富にすることが重要だ。改善できる身体能力はできるだけ改善すること。「悪いところを探して治す」視点のように因果関係を想定して、「この運動リソースが重要だから、他の運動リソースは改善しなくて良い」などと優先順位をつける必要もない。改善できる身体リソースはできるだけ改善する。
これまでの例で見たように、運動システムがどの身体リソースに価値を見いだし、どのような運動スキルを創出するかはセラピストには簡単に予想できるものではないからだ。改善できる身体リソースはできるだけ改善してみることは重要である。
また利用可能で有用そうな環境リソースはできるだけ工夫してみることだ。運動システムは身体の内外の運動リソースを区別しない。利用可能な環境リソースが増えれば、より適応的な運動スキルが生まれる可能性が高まる。
更に多様な運動課題を、多様な条件下で行ってみることだ。これによって身体リソースと環境リソースの関係の意味や価値である情報リソースがアップデートされるから。そしてより柔軟で適応的、創造的な運動スキル創出力を改善することになるからである。
そして運動スキル創出は、ある条件下でよく働くことがわかっている。それは「行為者に取って意味や価値の感じられる課題であり、それにアクティブに関わっていく」ということだ。
セラピストと患者さんは協力して適切な運動課題あるいは生活課題を見つけ、修正し,それに患者さんが積極的に取り組むときに運動スキルは生まれやすくなるのである。セラピストの課題設定と修正の能力が大きくものをいうところである。
今回のとりあえずの結論は、「悪いところを探して治す」以外のアプローチは、「運動システムの作動を理解し、運動システムの作動自体を強めるようなアプローチを展開する」ことである。(とりあえず、今はおしまい(^^;))
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「悪いところを見つけて治す」以外の発想(その6)
新生児歩行は、生まれたばかりの赤ちゃんの両脇を支えて持ち上げ、つま先を床につけて体幹を前に傾けると現れる歩行のような動きである。これは生後2ヶ月くらいから消失することが知られている。
この消失という現象について、従来学校などではどのような説明がなされてきただろうか?
学校では運動システム、つまり人体の構造と機能を基に説明する。そうすると「運動を変化させるのは脳である」との前提がまずある。解剖学や生理学を通じて作られた人体の設計図では、運動変化を起こしているのは脳であると決められているわけだ。
だから新生児歩行消失の原因は、以下のように脳の変化で説明される。
「生まれたときは脳が未熟で、脊髄レベルで支配される原始反射としての新生児歩行が現れるのである。しかし生後徐々に脳は成熟して、原始反射としての新生児歩行は抑制されるのである」
なるほど、新生児歩行消失の原因は、「脳の成熟」に還元されるわけだ。(還元は戻すという意味。この場合、全体の変化の原因は部分または要素というより小さなレベルに戻されているわけ)
しかし奇妙なことに、新生児歩行が消失した赤ちゃんをお湯に浸けると再び新生児歩行が現れることがある。そうなると、妙なことになる。お湯に浸けると脳の成熟が後退したことになるからだ。
一方動的システム論の視点から、この新生児歩行の消失を研究したのは、発達心理学者のテーレンらだ。一般にシステム論では、運動変化は「状況変化が起きたから運動が適応的に変化した」と考える。
たとえばお湯に浸けると浮力が働くので脚が軽くなって再び現れたのではないか、と仮定したのである。逆に言うと、下肢の重量が増えたので相対的な筋力低下が起こって、新生児歩行が消失したのではないかと仮説を立てた。
そして下肢重量が2ヶ月頃に急激に増えていることを突き止めた。それは下肢の脂肪組織が急激に増加したからだ。だから重くなって下肢が持ち上がらなくなり、新生児歩行が消失したように見えたわけだ。
するとテーレンらは次の仮説を立てる。相対的な下肢筋力低下が消失の原因であるなら、もし筋トレをしたらどうなるか?そこで新生児にトレッドミル上での歩行練習を定期的に行って見ると、新生児歩行の消失はなく、ずっと観察されたのである。
そうなると「新生児歩行は原始反射である」という前提も怪しい。そこで彼女たちは次の実験に移る。たとえば新生児を左右速度の違うトレッドミルのベルトの上にそれぞれの脚を置いてみると、ちゃんとそれぞれのベルトの速度に合わせて脚を運ぶことが観察される。どうも反射的な運動ではないようだ。
その他にも新生児の背臥位のキッキングの位相図は成人の歩行のものと変わらなかった。つまり新生児歩行と成人の歩行は別のものではなく連続したものではないか?
システム論の視点から新生児歩行を見ると以上のようなことがわかった。
ここで言いたいのは、人体を見た目の構造と機能で、機械のように設計図にしてみると、自然に脳はまるで機械のコンピュータのようにたとえられている。そして「運動変化のほとんどの責任は脳が負っている」と仮定しているわけだ。
このような見方をしていると、脳が大事であって、他の要素、つまり「脚の脂肪組織の増加」は完全に無視されてしまった。
人を機械のように見る視点で作られた設計図では、人の身体の各組織は予め「このような役割がある」と仮定されているので、上記のようなヘンテコな説明も起きてしまう。
もちろん人を機械のように見る視点にも、非常に優れた点があるのは間違いない。だからシステム論の見方が優れていて、機械のように見る視点はダメだと言っているのではない。それぞれに特徴があるということだ。
ただ人の運動システムを構造ではなく、作動で見ていくシステム論の視点でしか理解できないこともあるわけだ。
だから障がい者のできないところを見て、「原因は○○という要素だから、○○を改善すれば良い。その他のことは些細なことであるから無視してよろしい」ということにはならないのである。人は機械とは違うのだから!
では、どうするか?ということを次回は考えていくのである!(いやはや、大丈夫か?このシリーズは無事に着地するのだろうか?(^^;))(その7に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「悪いところを見つけて治す」以外の発想(その5)
前回は、運動システムがどのような状況で運動リソースにどのような役割を振るか、どのような価値を見いだすかはセラピストにはすぐにわからないことも多いと述べた。今回はその続きである。
脳卒中後、ベッドサイドでのリハビリ開始後に起座練習をすることがある。以下の通り。
その日、新人のPTとベテランセラピストが片麻痺の高齢の男性のリハビリに入る。新人が患者さんに課題を提示する。「こちら側に寝返ってから、座ってみましょう」
男性は健側に寝返ってから体を起こし、何とか片肘立ちになろうと頑張って頭を少し持ち上げるところまではできたが、なかなか肘立ちまでは行かない。苦労していると、ナースが入ってきて、バイタル測定や点眼薬の時間だというので部屋の外に出る。
新人さんが患者さんについて説明する。
「まず重力に逆らって体を片肘立ちに持っていくだけの体幹部や上肢の力が弱いと思います。第二に体幹部の柔軟性も低下しています。体幹の回旋方向のストレッチと片肘立ちになる動作練習を最初介助で繰り返し何度も練習してみたらどうでしょうか?しばらく繰り返し練習したら柔軟性と筋力が改善すると思います」
ややや、とても良い考えである。これは悪いところを探して良くするという視点で見れば満点の解答かもしれない。とても優秀な新人さんである。
もちろんこの「悪いところを探して良くする」という視点は、人を機械として見たときのアプローチであるとこれまで説明したとおり。
さてベテランさんはどうしたか?
「それはとても良い考えだよ!○○さん!優秀だね!ただこの患者さんはこの場でもすぐに座れるようになるよ。見ていてごらん!」
新人PTはどうも納得しない表情である。
ナースが退室した後に二人で入っていく。
ベテランセラピストはまず寝返りする前に指示して良い方の足で両脚をベッドサイドの端から膝下をはみ出すように指示して難しい部分は介助する。患者さんは初めての課題で少し戸惑ったが、手伝ってもらって何とか両下腿をベッドの端から出す。
それから「もう一度さっきの起き上がる動作を練習してみましょう!」と指示する。患者さんはもう一度さっきのように片肘立ちになろうとするが、やはり後もう少し片肘立ちへの重心移動ができない。ベテランセラピストは少し介助する。
すると・・・・できた!
「ではもう一回」とまた寝てもらってやり直すと今度はすんなり片肘立ちになられる。そこから肘を伸ばして少しずつ体幹に近づけて座られた!
「おお、スゴイ。上手にやられましたね。ではもう一回!」と繰り返すと今度は先ほどよりスムースに座られた。
「やあ、頑張られたですね!」こうしてその日の訓練セッションは終わった・・・ ベテランセラピストは退室後説明する。「まず両下肢が全部ベッド上にあると起き上がるときの体幹の持ちあげの抵抗になる。逆にベッドの端から膝から下を出しておくと、頭部の持ち上げ時に抵抗が少なくなるだけでなく、重りとして体幹を持ちあげる方向へのモーメントを生み出して起座を助けてくれるよね。だから片肘立ちになるときに今の力と柔軟性でも十分達成可能になるわけ」
これは臨床で普通によく見られるベテランセラピストの知恵あるいはコツである。通常上記のように言葉にされることはないが、経験から下肢が起き上がりの抵抗になることも、逆にベッドから出ていると重りとしてモーメントを生み出して課題達成を助けることも知っているわけだ。
1つの要素が状況によって、課題達成の邪魔にもなるし助けにもなることを経験的に知っていると、色々な場面で患者さんの運動システムの課題達成を助けることになるし、患者さんがそのコツを発見する手助けにもなるわけだ。
ベテランセラピストは、経験を通して悪いところを治すという以外のアプローチを身につけているものである。それは課題達成を通して身につけられるもの、「運動のコツ」と言われるものだ。
新人さんは、筋力と柔軟性低下を原因とした因果関係を想定した。これは前回の話で出てきた運動リソースの改善の部分である。この「(課題達成の)運動のコツ」は、CAMRでは「課題達成のための運動リソースの利用の仕方」である運動スキルというアイデアとして語られているものだ。
もちろんこれは小さな例であってあまり重要というか適切ではないのだが、人を機械として見ているとこの「運動スキル」学習の視点は弱く、あるいは無視されてしまいがちである(その6に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「悪いところを見つけて治す」以外の発想(その4)
あまり明確でもなかったが、前回までで述べてきたのは機械はやり方が決まっていて、結果もそれに対応している。しかし人では「状況に応じて課題を達成するために相応しい方法をその時、その場で無限に生み出す」ことが機械と異なる人の運動システムの作動上の特徴である、と説明してきたつもりである。
これを実現するために、人の運動システムはどんな構造をしているのかをもう少し考えてみたい。
CAMRでは、この構造は「豊富な運動リソースを利用して、多彩で柔軟で創造的な運動スキルを生み出すことのできる構造」と考えている。抽象的な説明で申し訳ないが、説明できない構造は、やはり作動の特徴でしか説明することができない。
運動リソースとは、運動を生み出すために使われる資源のことで、以下の3つに分類される。
①身体リソース:身体そのものや身体の持つ性質(筋力、柔軟性、体力、感覚、痛みなど)
②環境リソース:環境内にある性質(光、明るさ、温度、重力など)や構造、構築物、道具や他人や動物など
③情報リソース:身体リソースと環境リソースが関わるときにその相互作用から生まれる情報。情報リソースは行為者に取っての価値の情報 また運動スキルとは、行為者にとって必要な課題達成のための運動リソースの利用方法のことだ。
健常者では身体リソースが豊富で、その結果非常にたくさんの環境リソースを利用できる。また情報リソースも豊富なため、それらを利用して生まれる運動スキルは、多彩で柔軟で適応的に変化しながら、創造的にその時・その場で生み出されてくる。
逆に障害を持つということは、身体の一部を失う、麻痺で筋力が弱る・失う、柔軟性が低下する、感覚器の障害などで適切な情報を得られなくなるなどで、身体リソースが減少・喪失することである。そうすると利用できる環境リソースや適切な情報リソースが減少し、その結果、多彩で柔軟、創造的な運動スキルを生み出すことができなくなり、必要な生活課題を達成できなくなるということだ。
一例を挙げると、室内では何とか杖歩行できるが、屋外では危なくて歩けなくなったり、固定の手すりがあれば起立できるが、車椅子からは起立できなくなったりするなどは、身体リソースの減少で、環境リソースを上手く利用できなくなり、適応的に生み出される運動スキルが少なくなるからである。
そう理解すれば、リハビリでおこなうべきは、利用可能な運動リソースをできるだけ増やし、それらを活用するための運動スキルを生み出す経験を積む運動スキル学習を経験することが必要だとわかってくる。
たとえば身体の一部を失えば、他の身体部位を利用して、生活課題を達成するための運動スキル学習を進めるわけだ。あるいは義足のような環境リソースを用いて、その運動スキル学習を進める。その際、他の身体部位の筋力や柔軟性、感覚の鋭さなどが改善していく、つまりそれらの運動リソースが豊富になれば、運動スキルはより多彩に柔軟に発展するだろう。そして訓練前よりは適応的に生活課題達成ができる場面が増えてくるわけだ。
機械修理の考え方では、「悪いところを探して直す」と考える。それ以外に修理の方法はないからだ。
しかし人では、「立って靴下を履く」の課題で見たように、筋力やバランスを鍛える以外にも柔軟性という身体リソースを利用してその同じ課題を達成できるし、壁などの環境リソースを利用してもその課題を達成できる。機械では各部品の役割は決まっているが、人の運動システムでは各リソースの働きやその価値は状況によって違ってくるので、「これは無駄、これは有用」と頭から決めてかかるのは危険である。
つまり増やせる運動リソースはできるだけ増やした方が良いと考えられる。運動システムがどのような状況で運動リソースにどのような役割を振るか、どのような価値を見いだすかはセラピストにはすぐにわからないことも多いからである。
次回はこの具体的な例を見ながら理解を深めてみよう。(その5に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「悪いところを見つけて治す」以外の発想(その3)
前回は機械と違って人はその時、その場の状況に応じて様々に異なった方法で同一課題を達成できるということを説明した。
今回はどうして人の運動システムはそんなに柔軟で、創造的に課題達成方法を生み出すことができるかを考えてみよう。
まず機械では、どんなに多くの部品を複雑に組み合わせても、動き方は常に一定である。機械は常に同じ作動を正確に繰り返すし、同じ結果を生み出すわけだ。方法も一つ、結果も一つということだ。
一方人では、一つの単純な動きでもばらつきが出やすい。だから職人やスポーツ選手は、常に同じ結果が出るようにもの凄い数の反復練習を行う。しかしその同一結果は、機械のように「同じ動き方」をして生み出されているのではない。
ロシアの運動生理学者のベルンシュタインは、熟練した職人のハンマーの動きが毎回少しずつ軌道をズレたり、タイミングが異なっていることを発見した。つまり毎回異なったやり方で同一の結果を生み出しているのである。毎回同じ動きを生み出しているのではなく、毎回異なった動きで同じ結果を生み出していることが人の運動システムの特徴であると気づいたわけだ。
人の体は機械と違って粘性や弾性のある膜様の筋肉で様々な方向から全体的に包まれており、関節も機械に比べてルーズな結びつきであるから、それも当然である。これは様々な方向に力を生み出し、無限の軌道を取りうる構造である。つまり無限に異なる運動を生み出す構造である。
だから簡単な動作でも毎回同じ運動を生み出すのは困難だ。そこで同じ結果を生み出すには知覚によって、最終的に同じ結果になるような予期的な運動のコントロールを身につけることが必要で、このために莫大な反復練習が必要な訳だ。
これで少し人の運動の構造というか仕組みが見えてくる。機械は一つの運動と一つの結果が対応している。しかし、人の運動システムは無限に異なる運動を生み出して、様々な結果を生み出す構造である。だから異なった状況下で、実にたくさんのやり方の中から課題を達成するのに一番都合の良い方法も生み出せる訳だ。
まあ結論から言うと、根本的には機械とは異なった構造であるし、その作動は機械の作動とは丸っきり異なっている。
もちろんこのシリーズの最初で述べたように、人の体は機械として理解してもうまく行く側面があることは間違いない。特に整形の分野では、この考え方、「悪いところを探しては治していく」という視点でうまく行くことも多い。
だがこのやり方は脳性運動障害の領域ではうまく行かないことが多い。基本脳の細胞が壊れてその機能が失われているわけだが、リハビリではどうもそれを治すことはできないようだ。日本では60年も前からこの考え方は行われているが、未だにそれがうまくいっているという科学的な報告は1つも出ていない。
脳性運動障害の領域で、この「悪いところを治す」という方向性は、リハビリではダメだが、電子工学などの分野ではうまく行くかもしれない。
最近各国で行われている経皮的に脳波を拾って、身体に埋め込まれた筋活動を刺激する装置に伝えて下肢を動かすのがそれだ。脳波で機械をコントロールして、体を動かす試みである。まあ、実際に「失われた機能は機械でカバーする」というこの発想自体が、元々人を機械として扱う枠組みから自然に生まれてくるものだろう。
ともかく科学技術の発展によって患者さんが利用可能な新しい環境リソースが生み出され、新しい波を起こしている。これには大いに期待したい。新しい環境リソースを利用するための運動スキル学習にはリハビリが必要なのは間違いないので、将来的にはこの分野のリハビリも発達するだろう。
さて、それでは現在のリハビリではどうしたら良いだろうか?それは「悪いところを探して治す」以外のアプローチを発展させて、リハビリならではの成果を生み出すことではないか。
リハビリは、人の運動システムの作動の特徴を理解しているがゆえに、独自の方法を生み出して患者さんを助けることができるのだ、という方向性を進むことである。(その4に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「悪いところを見つけて治す」以外の発想(その2)
「立ったまま靴下を履いてみましょう!」というと、多くの人が片脚立ちになり、支えていない方の脚を大きく屈曲させて、両手で持った靴下を履く動作をする。
中にはバランスを崩して、すぐに履けない人もいる。そこで「どうしたら立ったまま安定して靴下を履けるようになりますか?」と聞くと、大抵のセラピストは、「下肢を鍛えたり、片脚で様々な重心移動の練習をしたり、体幹の筋力・バランスを鍛えたりするような練習をしたら良い」と答える。
学校で教えられた「身体の悪いところを探して、改善する」という視点がしっかりと身についているわけだ。確かに悪いところを見つけ出してそれを改善することで結果を出せるだろう。
この課題には、片足で立ってバランスをとりながら重心を保持する働きが必要で、下肢の支持性や体幹の柔軟性やバランス能力が劣っていると、片脚での靴下履きがうまく行かないと考え、それらを改善しようとしているわけだ。
前回これは、「機械を直す」という発想から来ているのではないかと説明した。機械を直すには、作動の様子からどこの部品のどの機能が悪いかを予想し、その部品を修理・交換すれば良いわけだ。
しかし人は機械ではない。人には人ならではのアプローチもある。たとえば「立って靴下を安定的に履く」は、「壁にすがって片脚立ちをしながら靴下を履く」ことでこの課題は達成できる。あるいは支持性が弱いなら、「片脚を少し前にして両脚で立ち、両手で靴下を持って前に出した方の足の前に持っていく。それから足のつま先を上げて靴下をかぶせ、今度は踵を浮かして靴下を引き上げる」やり方でも可能である。
「なあんだ、ずるい!片脚で立って履くのかと思うじゃないか!」と言われそうである。
しかし「立ったまま靴下を履いてみましょう」という課題である。特定のやり方を指定しているわけではない。
ロボットであれば、間違いなくプログラムされた特定のやり方で靴下を履くだろう。というより、その履き方しかできない。もしその履き方ができないなら、どこかに故障があるわけだ。だからといって、人でも特定のやり方に縛られる必要はない。
人は同じ課題でも状況に応じてやり方を変えるから。その時、その場で適切な運動スキルを生み出すことができるからだ。
更にリハビリでは、まず「生活課題の達成力を改善する」ことが大事ではないか。患者さんができるかどうかではなく、「特定のやり方をまず(正しい運動として)勧める」というのは、セラピストの価値観を押しつけるような気がして、どうもリハビリでは相応しくないように思う。
たとえば片麻痺後に分回し歩行で実用的に歩いている患者さんに、「その歩き方は正しくない。健常者のように正しく歩きましょう」というセラピストの価値観で特定のやり方という目標を押しつけるようなものではないか。
これが達成可能な目標ならまだ良いが、実際には麻痺を治すことはできないし、結果的に健常者の様に歩くこともできないので、達成不可能な目標を押しつけていることになる。
機械ではこれが正しい作動ということがはっきり決められているので、その正しい作動に戻そうとする。機械を基に考えていると、まずは人も体を治すことが基本になる。更に健常者の様に「正しい運動」をすることが目標になりやすい。正しい運動を勝手に仮定して、「(これが正しい運動だから)ただ課題が達成できてもダメ。正しい運動をしましょう」などということになってしまうのではないか。
でも人では課題達成の方法は無数に生み出される。どの運動が正しいかではなくそれぞれ異なった方法は状況に応じて選ばれるわけだ。適正な運動は状況に応じて異なるわけだから、どの方法が良いと一つに決めることはむしろナンセンスである。麻痺があれば麻痺があるなりに歩くことが当然だろう。
今回のように靴下を履く場合、筋力やバランス能力の代わりに両脚をついたまま柔軟性を用いて靴下を履いたり、壁などの環境リソースを利用して履いたりすることは、人では普通に見られる。
これはCAMRでは、「同一課題の運動リソース交換可能性」と呼ぶ人の運動システムの作動の特徴である。「立って靴下を履く」という同じ一つの課題は、状況に応じて様々な異なる運動リソースを置き換えても、その都度その利用方法である運動スキルを生み出して課題達成してしまうという性質である。
そうすると課題達成は、「原因と思われる身体リソースを改善するだけでなく、他の身体リソースを置き換えたり、環境リソースを利用したりしても可能である」と考えることができる。この視点を持つだけでも、状況に応じたより柔軟なリハビリ方針と手段を提供するための柔軟な思考を持つことができるのである。(その3に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「悪いところを見つけて治す」以外の発想(その1)
病気などになったとき、「悪いところを見つけて治す」という発想はごくありふれたものである。というより、それ以外の発想をなかなか思いつかないのではないか?
] 実はこれは「機械を直す」から来た発想かもしれない。西欧の思想の根底には、「人は神(又は自然)が作った機械である」という「人間機械論」という思想がある。だから西欧の人々は人体を機械として扱うことにあまり抵抗はないようだ。
実際に西洋医学はこの方法で大きな成功を収めた。悪いところを見つけて治し、治すことができなければ最近では「臓器移植」なども行われる。徹底的に構造を治すことを目指しているようだ。
このように人を機械として見る発想も非常に効果的なアプローチである。人を機械として見てもうまく行く側面があるのはもう間違ない。
そしてリハビリの分野でも、整形分野ではうまくいった。これでリハビリは社会的に存在価値を認められたわけだ。
そして脳性運動障害では脳の細胞が壊れるので、脳の細胞を再生したり、脳の機能を再生したりしようとした。しかしこれはどうもうまくいっていない。日本でもこの考え方が入ってきてから60年ほどになるが、未だにリハビリで脳の機能を再生してマヒを治したなどという科学的な報告はない。リハビリではどうも「脳を治す」というのは不可能ではないか。
実際に「この悪いところを治す」という発想では、「治す、交換する」ことができない部位の障害では壁にぶつかって手が出せなくなる。
しかし最近は、リハビリではなく電子工学などの分野の発達で、脳の機能を手助けするような取り組みで成果が見られる。たとえば経皮的に脳波を拾って、それで手の筋肉に繋いだ刺激装置に指令を出して手を動かすような機械である。 この装置のような環境リソースが発達すれば、この考え方もまた壁を乗り越えていくのだろう。
しかし、このような「機械を直す」以外の発想はないものだろうか?少なくともリハビリではこの考えは壁にぶつかっているようだから。
そもそも人は機械ではない。人は動物であり、機械とは異なった構造を持ち、機械とは異なった作動をするものである。だから動物の運動システムの構造とその作動を基にした別の発想のアプローチが本来あるはずである。
今回のシリーズではこれを考えてみたい。
まず基本、機械を修理するときには悪い部品やユニットを見つけて「直す、修理する、あるいは交換する」以外に修理の方法はない。それは機械の部品やユニットは最初からシステム全体の中で明確に役割が決められているからである。だからある役割を持った部品が壊れてしまうとシステム全体がうまく作動しない。ロケット打ち上げ失敗のように小さなたった一つの部品の故障で全てがうまく作動しなくなる。ビス一つにだって「固定する」という明確な役割が与えられているわけだ。
しかし人ではどうだろうか?腓骨神経麻痺を起こすと下垂足が起きる。もし歩行ロボットで足部を持ち上げる動力あるいは力の伝達装置などが壊れると同じようにつま先が垂れてしまうだろう。すると歩こうとするとつま先が床に引っかかり転倒してしまう。
もちろん人でもつま先を引っかけて転倒するが、何度か繰り返すうちに運動システムはCAMRが「自律的問題解決」と呼ぶ作動によって、「鶏歩」と呼ばれる歩き方を創出し、熟練することによって歩行動作を回復してしまう。ただ単に歩くだけのロボット、機械ではこんな作動は生まれない。
人の運動システムでは悪いところが治らない場合は、利用可能な別の運動リソースを置き換えて、新しい運動スキルを創出して問題を解決してしまうわけだ。各部位・要素の役割は固定されたものではなく、役割を交換したり新しい役割を生み出すような運動システム全体の再構成が行われる。
もし人の運動システムの作動の特徴をよく知っていれば、「悪いところを探して治す」以外の発想のリハビリ・アプローチも生まれるのである。(その2に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!













