臨床問題解決能力アップへの近道☆CAMR関連情報ランキング!
CAMR基本テキストリハビリのコミュ力

すぐに役立つ知識を学ぶ!
人の運動システムの特徴に基づくアプローチで、すぐに使えるベテランの臨床知を簡単に学べます!
詳細はこちら
CAMR公式 Facebookページ

最新のCAMR情報を更新!
講習会のご案内や、CAMR研究会からのメッセージなど、CAMRの最新情報が最速で得られます!
詳細はこちら
CAMR公式 ホームページ
CAMRのすべてがわかる!
基本概念から活動記録まで、CAMRをもっと知りたい方へ。関連論文やエッセイも多数掲載しています!
詳細はこちら
学校では「構造と各器官の働き」から運動システムを習います。これはこれで有効な見方ですが、人の体を機械のように理解します。だからそれだけではちょっと物足りない!
CAMRはシステム論を基に、人の振る舞いを観察して人の運動システムの作動の特徴を理解します。これによって機械ではなく、生物としての人の運動システムの特徴がより活き活きと理解できます。
そうするとこれまでとは異なった新しいアプローチが生まれるようになります。
学校で習う理解を基にしたアプローチとCAMRのアプローチの二刀流で仕事をすると、問題解決能力がアップして日々の仕事が楽しくなりますよ!
日時:2025年9月14日(日曜日)
9時半~13時まで
場所:広島アステールプラザ 第2小会議室
勉強会申込みは、氏名・職種・経験年数を記入。以下の◎をアットマークに変えてメールしてください。
Camrworkshop◎mbr.nifty.com




問題は「ある」のではなく状況の中に「生まれる」、時として「作られる」 番外編~問題も「問題」にならなければ問題ない~
秋山です。連休は九州旅行に行き、温泉に入りすぎて肌の油分が無くなってしまいました。乾燥してかゆいです。
判じ物のようなサブタイトルですが、「それは本当に『問題』なのか?」ということです。
ケアマネさんからこんな相談をされました。「Aさんの妻は、『夫は昼間もいつもベッドにいる。全然動こうとしない。体操とか運動しないとだめになる。何とかしてほしい』と言われるんだけど、家でできる体操みたいなのある?」Aさんは家で動かないということがまず問題になってるようです。
最近は自主トレ用のパンフレットも動画もたくさん出ています。臥位~立位さまざまなレベルのものがありますね。まあ、経験上こういう時に、言葉通りに体操を紹介しても実施されないことが多いですね。
問題は状況の中に生まれます。
ケース1:Aさんはかろうじて伝い歩きができるレベル。食事は食卓の椅子でとるけど、それ以外はほぼベッドでごろごろ。活動量が著しく低下しています。この状態では、家で動かないのは廃用症候群を進行させるので「問題」といえそうです。
ただ、「だから体操を!」というのはちょっと短絡的ですかね。長く座っても疲れにくい椅子を用意するとか、テレビを見るとか新聞を読むとか好きなことをベッドから離れてできるような環境整備とかをまず整えてみてはどうでしょう。
ケース2:上記のような動作レベルのAさんですが、週3回通所サービスを利用していて、そこではできるだけ歩いて移動し集団体操やレクに参加して横になることなく過ごされています。
となると様相は変わってきます。家ではゆっくりしていたいと思われているのかもしれません。また、妻が言うほど動いてないわけではないかもしれません。
妻は「朝はさっと着替えて食事を済ませてくれないから、いつまでも朝の家事が終わらない」と不満があり、そのことを言っているのなら、「体操指導」は良い解決策ではないです。やることをやってしまえば、ベッドでゴロゴロしていても問題にはならない。
一見、「問題」っぽく見えることに飛びつかない、じっくりとそのことが起こってる状況を見てみることが大切ですね。西尾さんの投稿は毎回印象的な素敵なイラストがついていましたが、私は絵心も作画技術もなく、ギブアップです。でも、何もないのは寂しいので写真を載せました。内容に関係ないけど・・・。

問題は「ある」のではなく状況の中に「生まれる」、時として「作られる」 その3~誰の問題か?それが問題だ!~
秋山です。大型連休、いかがお過ごしですか?さて、完結編です。
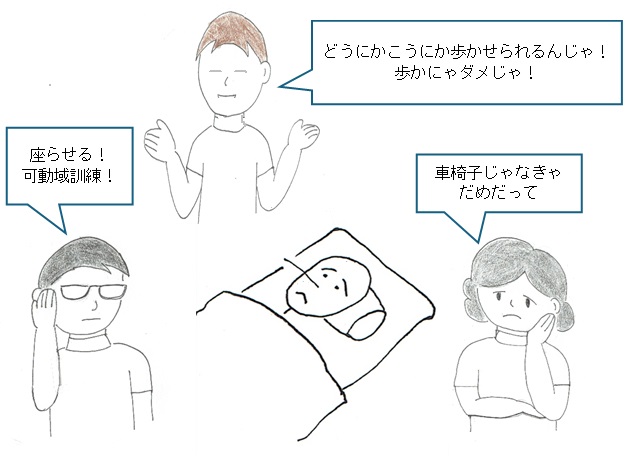
ここで振出しに戻って、最初に起こったことは何かを考えてみましょう。そうです。「入浴介助で抱えてもらう時に首がとても痛い」だったのです。これがAさんの問題だったんですね。
そこから夫のBさんは「歩かせてなかったのが問題→歩行器を再び借りてしっかり歩かせる」、それを聞いたケアマネさん「危険なのに自分の考えを通そうとする夫の頑固さが問題→担当OTから話してもらう」、相談されたOT「足部の保護のため車椅子導入しているのに使われていないのが問題→移乗の練習。医師から歩行のストップをかけてもらう」、依頼された医師「診察していろいろ説明しても聞き入れない夫が問題→前から言っている基本を夫にやらせる」と、元の問題を離れてそれぞれが「問題」を作ってたんですね。
これら一つ一つも問題ではあるのですが、今はそこじゃない。ある問題に対して、それぞれの立場で専門性を活かして協働して解決に向かう、にはなっていない。自分が常日頃感じている問題にすり替わっていってしまった。解決すべきは「入浴時の苦痛」だったのです。
さて、解決に向けて仕切り直し。一番肝心な訪問入浴業者さんに状況を伺います。あちらのスタッフもこまっていたところでした。そこで今更ながら、Aさんの身体状況をOTから説明。スタッフから「担架みたいな補助具もあるんですがどうでしょう」と提案有り、次回試すこととなりました。Aさんにも話を伺い、首が動くと痛いという不安でより硬くなり、さらに痛みの不安が増すという悪循環がありました。
ネックピローでゆるく固定することで「これなら我慢できる」となりました。
Bさんには「歩けなくなるとの心配はごもっとも。足を保護する形で、まず立つ練習をする方法を考えます。入浴はリラックスできるよう、スタッフに任せましょう」とお伝えし、何とか納得していただけました。
Bさんには着替えの介助が難しいという悩みもありました。脱ぎ着の前に行うよう、軽く手足の屈伸のコツを説明。それを可動域訓練指導と主治医に報告(^^;) 痛みの訴え無く、入浴することができました。
この問題の解決方法はいろいろあります。今回やったことよりももっといい方法があると思います。そもそも、早く気づけよ!私!これからは多職種協働がますます重要ですが、かみ合ってないと感じることもあります。そんな時は「それは誰の問題か?」を整理してみると解決の糸口がつかめるかもしれませんね。(終わり)
問題は「ある」のではなく状況の中に「生まれる」、時として「作られる」 その2~で、何が問題だったっけ?~
秋山です。先週の続き、訪問リハビリの事例です。
Aさんは体調不良から臥床時間が長くなり、現在ほぼ寝たきりです。仰臥位の形で拘縮が進み、起き上がりや端座位保持が困難になっています。強い尖足、足趾に潰瘍や壊死があり歩行できなくなっていました。2ヶ月前まで歩行車で室内介助歩行されていましたが、足部への負担が大きく、歩行車は返却し車椅子に変更したところでした。
主介護者の夫のBさんは歩行させたいという気持ちが強く、車椅子は「乗せるのが、かえって大変じゃ」と使用されていませんでした。ベッド上清拭対応でしたが、訪問入浴を利用されることとなりました。その2回目が終わったある日・・・。
ケアマネ「Bさんが、『入浴の時、寝たままふたりでかかえられると、すごく首を痛がって大声出すけぇ、また歩行車を借りて歩かせていいか。本人も歩く方がましと言う』と言われるんですがどうでしょうか」
私「足の状態がよくないし、拘縮や筋力低下もあるから転倒リスクが高く危険ですね。壊死の部分の治療中だから足先への負担は移乗くらいの最小限でないと。車椅子を使えばいいのですが、Bさんはその気なさそうですね。使い方を説明しているんですが。今度、移乗するところをみてもらいます。とりあえず主治医から歩行のドクターストップかけてもらいましょう」
ケアマネ「主治医に伝えますね」
主治医からケアマネとリハ担当(私です)に招集かかり三者でカンファレンス。
医師「で、どうなの。歩くなんて無理でしょう」
私「そうですね、先生から足の治療のためにストップをかけてもらえ・・」
かぶせ気味に
医師「言っても言ってもだめでしょう、あそこは。もっと基本をさせないと。可動域訓練の指導してるの?」
私「なかなか忙しい方なので・・」
明らかにかぶせて
医師「そんなこといってるから、ここまでになっちゃうんでしょう!座れてるの?えっ、ほとんどやってない?もう!まず座位保持。夫にさせるためには?じゃあ、食事の時はしっかり起こして。日に3回ね。それと毎日下肢の可動域訓練させるように。プランたてて報告して」
私「・・・(そんなことできりゃ、今ここに来てないよ!)」
ケアマネ「・・・(ここはひとまず撤退しましょう)」と目で訴えられ、いったん退却。
ケアマネ「Bさんは先生への要望もしょっちゅう変わりますからね。先生も振り回されてるという気持ちがあるんでしょうね。実はこの前の入浴ではBさんが強く言って、訪問入浴の人と三人がかりで歩かせたそうです。それで『できる!』と思ったみたいです」
私「えー、だめですよ。だから足が治らないんですよ。訪問入浴さんも断ってくれればいいのに。車椅子ですよ、車椅子!」 と、車椅子を連呼しながらも、何かおかしいと思いました。
ちょっと頭を冷やして見直すと、この話の流れは変だ、解決になるのか?っていうか、そもそも問題は何だった?続く~