臨床問題解決能力アップへの近道☆CAMR関連情報ランキング!
CAMR基本テキストリハビリのコミュ力

すぐに役立つ知識を学ぶ!
人の運動システムの特徴に基づくアプローチで、すぐに使えるベテランの臨床知を簡単に学べます!
詳細はこちら
CAMR公式 Facebookページ

最新のCAMR情報を更新!
講習会のご案内や、CAMR研究会からのメッセージなど、CAMRの最新情報が最速で得られます!
詳細はこちら
CAMR公式 ホームページ
CAMRのすべてがわかる!
基本概念から活動記録まで、CAMRをもっと知りたい方へ。関連論文やエッセイも多数掲載しています!
詳細はこちら
人が必要な課題を達成する場面を具体的に考えてみよう。たとえば以下はスパイの逃走場面のストーリーである。
武器を持った敵に追われて、俺は8階建てのビルの屋上に追い詰められる。今、敵は1階辺りで俺を探しているはずだ。後戻りはできない。問答無用で銃で撃たれてしまう。グズグズもできない・・・
隣のビルの屋上までは約3メートルか。ここは下の道路から20メートル以上の高さがある。落ちたらイチコロだ。なんとか飛び移るしかない。もし平地であれば、3メートルの間隔なら軽く助走すれば俺は十分に跳び渡ることが可能である。
しかし飛び移るためには、高さ1.5メートル、幅20センチの塀の上に立たなければならない。「やややっ、助走ができないではないか!」
しかも俺は高所恐怖症である。全身がすくんで、実力を発揮できないに違いない。「いつもそうだ!俺は緊張すると、できてることができなくなってしまう。やれやれ・・・」
俺は辺りを見回す。「何とかしなくては・・・」
物干し台があり、長さ3メートル以上はある物干し竿が5本かかかっている・・・
急に閃いた!
一本の物干しは俺の体重を支えることはできないが、五本まとめると支えることができるのではないか?毛利元就の言うとおりではないか!一本の物干しは折れても、五本が束になると折れないに違いない!
俺は五本の物干し竿をかき集めた。そしてそれをあちらのビルの屋上の塀にかけようと急いだが、ここで躓いてしまった。俺は前方の床に倒れ込み、はずみで持っていた物干し竿が前方に飛び出し、壁を飛び越えて下に落ちてしまった。
「ぎゃっー!」と叫ぶ声がはるか下から聞こえる。通行人の誰かに当たったのかもしれないが、今はそれどころではない。俺の命が危ういのである。「知ったこっちゃない!」と思わず声に出る。
再び辺りを見回すと、ビルの反対側の壁に、さびた鉄ばしごと思われる物体が立てかけてあった。近づくと長さが3メートル以上はありそうだ。「やったー!」俺は小躍りしながら鉄ばしごに駆け寄る。「渡りに舟ではないか!なんという幸運だ!いや、もっと早く気づくべきだった。俺のばかばか!おまぬけちゃん!」意味の分からない言葉が自然に口をついて出てくる。
俺は鉄ばしごをむんずとつかむと、両手で持ち上げて反対の壁に走る。重くてよろめくが必死で走る。壁につくと鉄ばしごを立てて持ち上げ、あちらのビルのコンクリートの塀に渡すと大きな音をたてて震えながら乗っかった。こちらもしっかり壁に乗っかっている。俺は壁によじ登り、四つ這いになって鉄ばしごの橋の上をおっかなびっくり渡り始める。
しかし半分来たところで後から複数の駆ける足音が聞こえてきた・・・・・「あそこだっ!撃てっ!」と叫ぶ声が聞こえる。俺の体が不意に思いもかけず鉄ばしごの細い鉄の棒の上に立ち上がり、ビルの壁の向こうにダイブした!銃弾が耳元をかすめる・・・・後から思うと命の危機に、高所の恐怖が吹き飛んでしまったようだ。
長い例になってしまった(^^;)この課題達成のポイントをまとめると以下のようになる。
「人の運動システムは必要な課題を自律的に達成しようとする。もし課題達成に問題が生じると、自律的に問題を解決しようとする。そのために身体の内外に利用可能な運動リソースを探索する。そして課題達成や問題解決のための実現可能な運動スキルを生み出して実行する。失敗すれば、さらに別の運動リソースや運動スキルを探して、課題達成・問題解決しようとする」のである。
そしてこのことは、お腹が空いていても、背中が痒くて手が届かないときも、カップ麺の箸がないときも、おしっこが漏れそうなときも同じである。
人の運動システムには、その時その場でなんとか問題を解決して課題を達成するために、自律的に身体の内外に利用可能な運動リソースを探し、課題達成のための運動スキルを生み出して実施するのである。(その3に続く)
この記事はNo+eに掲載されたものです。以下のURLから。
https://note.com/camr_reha/n/n5305e6ff98c8



前回のおしらせで、メールアドレスが間違っておりました。ご迷惑をおかけしました(^^;)
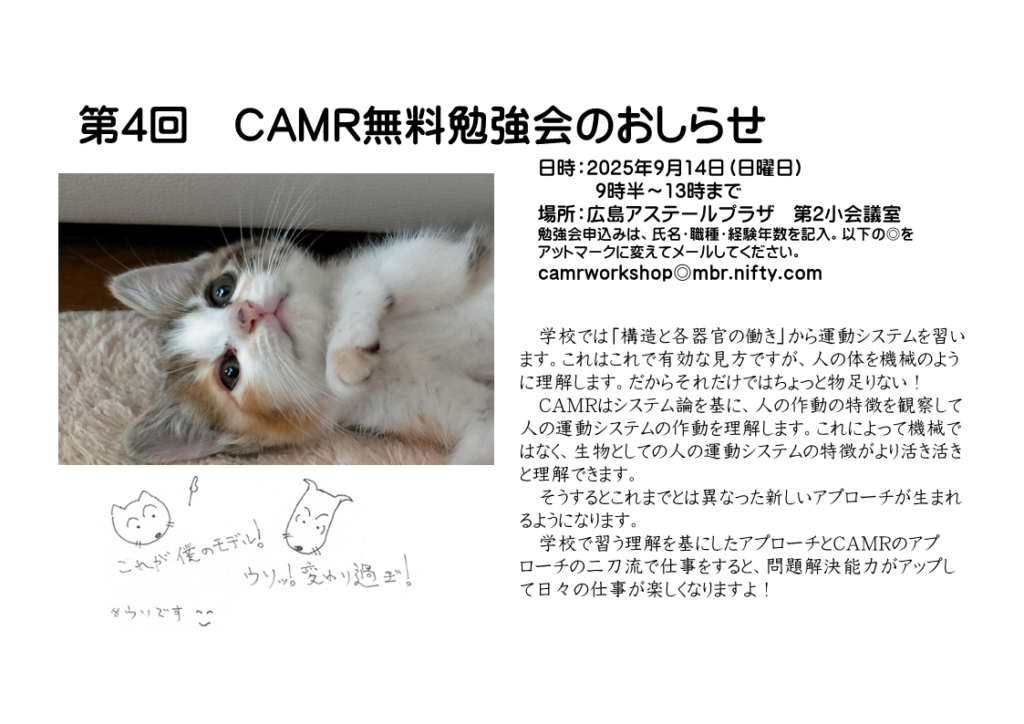
第4回 CAMR無料勉強会のおしらせ
学校では「構造と各器官の働き」から運動システムを習います。これはこれで有効な見方ですが、人の体を機械のように理解します。だからそれだけではちょっと物足りない!
CAMRはシステム論を基に、人の振る舞いを観察して人の運動システムの作動の特徴を理解します。これによって機械ではなく、生物としての人の運動システムの特徴がより活き活きと理解できます。
そうするとこれまでとは異なった新しいアプローチが生まれるようになります。
学校で習う理解を基にしたアプローチとCAMRのアプローチの二刀流で仕事をすると、問題解決能力がアップして日々の仕事が楽しくなりますよ!
日時:2025年9月14日(日曜日)
9時半~13時まで
場所:広島アステールプラザ 第2小会議室
勉強会申込みは、氏名・職種・経験年数を記入。以下の◎をアットマークに変えてメールしてください。
camrworkshop◎mbr.nifty.com
まずは「立ったまま靴下を履く」という運動課題を考えてみよう。
あなたなら、どうやってこの課題を達成しますか?
元気で活動的に動いている人なら、「靴下を履く方の脚を床から持ちあげて片脚立ちになる。そして両手で靴下の履き口を広げて挙げた足の前に持っていき、靴下を履く」という「方法」で靴下を履くはずである。
この場合は、重力と床の間で力なり柔軟性によって体幹を安定させるための基礎定位の能力が必要だろう。また片脚で重心をコントロールしながら支持し続けるための筋力が必要である。両手で持った靴下に足先を持っていく柔軟性も必要である。また片脚立ちしながら両手で靴下をコントロールするにつれて重心が動揺するが、その揺らぎを吸収してバランスを保つことを容易にする体幹や下肢の柔軟性も必要である。
もし、基礎定位の能力や筋力や柔軟性のどれかが劣っていると、この「方法」は利用できない。
それでその場合は、「壁にお尻をつけてもたれかかり、片脚立ちになって靴下を履く」という「方法」によって課題達成が可能となるかもしれない。壁を利用して、支持や柔軟性や基礎定位の能力低下を補う訳だ。
もし筋力が弱くても身体前方への柔軟性が極めて高ければ、両脚で立ったまま「片脚を前に出してつま先を挙げ、体を前方に屈曲して両手で靴下をかぶせ、その後つま先を下ろして踵を挙げ、靴下を引き上げる」という「方法」で課題達成が可能である。
こうして見ると、運動の成り立ちを以下のように説明することができる。
基礎定位の能力や体を支え動かす筋力、柔軟性などは、運動課題達成のための運動の資源(リソース)である。それでこれらの身体や身体の持つ能力、性質などはCAMRでは「身体リソース」と呼ぶ。
壁にすがって履く場合、壁は環境内にあって課題達成に利用できるので、環境内の資源であり、「環境リソース」と呼ぶ。
身体リソースと環境リソースは合わせて単に「運動リソース」とも呼ぶ。
筋力は単に力という性質であり、柔軟性は単に運動範囲が広いという性質である。これら運動リソースが課題を達成することはできない。課題達成のためには力や柔軟性をどう使うかという「方法」である「運動スキル」が必要である。
そうすると「運動スキル」は、「課題達成のための運動リソースの利用の仕方」と説明することもできる。
さらに運動スキルはどのように生まれるかを考えると、「予期的に運動リソースの意味や価値を知り、それらを利用して課題達成のための運動スキルを生み出し、修正する能力」が必要である。それでこの能力のことを「予期的運動認知」と呼ぶ。
CAMRでは、上述のように課題達成の運動は「運動リソース」、「運動スキル」、「予期的運動認知」の3つから成り立つと考える。
そうすると従来学校で習ったように「脳が理解・学習・命令して、筋力が力を生み出し、骨・靱帯が力に支持と方向性を与え、感覚によって課題達成を修正する」という運動理解とは全く異なった運動理解の視点を持つことができる。
CAMRの視点を持ったセラピストはこの2つの異なる運動理解の視点から、運動を解釈することができるため、運動問題に対して幅広い柔軟なアプローチで対処できるようになる。
今回のシリーズは、この新しい運動理解の視点について簡単に説明してみたい。(その2に続く)
この記事はNo+eに掲載されたものです。以下のURLから。
https://note.com/camr_reha/n/n9fe5ffdb02af
運動スキルて何だっけ?その2~パフォーマンスはけっこうすぐ変わる(こともある)~
西尾さん、おかえりなさい!投稿がにぎやかになり、つい自分の分のアップが遅れてしまいました・・・。油断してた・・・。
趣味で山登りに行ってます。たまーに行く程度の永遠の初心者なので、二足歩行で登れる山にしか行かないのですが、時に手足を駆使して岩にへばりついて這い登らないといけない時があります。
同行の経験者が「そこに右足かけて、右手であそこ持ったら左足がここに上がるでしょう」と指示を出すのですが、上手くいくとは限らない。しばしば意味が分からない。というより、それができれば困っとらんわ!かと言って、「思うようにやればいいんよ」では皆目見当がつかない。ああ、これはクライアントさんがリハビリに臨む時とおんなじなんだろうなあ。
まぁ、事細かに指示をされても、体格も運動機能も元々のスキルも違うのでパフォーマンスが同じにならなくても不思議はないです。それと、経験者(セラピスト)には道筋がわかっているから次への準備をしながら動くけれども、新しい不慣れな課題を初めてする人にはそれはわかりません。
たまたま上手くいっても、次に活かせないので常に指示が必要となります。「さっきのところと一緒よ。同じように行けばいいんよ」「どこが同じなんかわからん。できん」「さっき登ったでしょーが!」「そんなこと言われても、どこに取り付いていいのかわからんもんはわからん!」
ああ、せっかくの楽しいはずの山登りがぁぁ・・・。
結局、自分で動いて試行錯誤するしかないのです。でも、有益なアドバイスはあります。例えば、足掛かり全く無しと思ってもこれくらい足先がのれば踏ん張れるとか、大きく足を上げすぎると次が続かないから初めは小さくとか、左手がひっかかったらひっぱり上げる力が使えるがその辺にホールドはあるかとか。右のルートが簡単に見えるかもしれないが左ルートの方が長くてもホールドが多いとか。
その上で、自分ができること、できないことがわかってきてどう進めばいいか、なんとなーくわかってきます。すると次の岩場ではさっきよりもぐっとパフォーマンスは改善します。
この時、筋力や可動域というような身体リソースはごく短時間なので改善したとは思いにくい。有用な環境リソースを発見しやすくなっています。探索によって運動スキルの創造がみられて、「この課題はできる、できた!」となりました。適切な課題(技量にあった山)、コンプリメント(「大丈夫、いいよ!」)は大事ですね。
中四国最高峰の霊峰石鎚山には鎖場があるんです。怖くていつも迂回路を行きます。いつかスキルは創造されるのでしょうか?(終わり)
運動スキルって何だっけ?その1
秋山です。爽やかな初夏と思っていたら、九州南部は梅雨入りとか・・・。
CAMR入門シリーズその5の動画がアップされています。リソースとスキルがわかりやすく説明されています。是非ご覧になってください。
「CAMR入門その5 課題を達成するのは筋力ではない!運動スキルである!」
https://www.youtube.com/watch?v=MaT8Wj1x5S8
で、最後の方に出てくる「セラピストは運動スキルを教えることはできない」「セラピストの仕事はクライアントの探索の援助」について。CAMRの中では「正しい運動の仕方なんてものはない」ということがよく出てきます。
それは納得したとして、では画一的ではなく個々に応じた運動の仕方を教えることはできるのか?答えは「No!」です。
運動スキルの創造は患者さん自身の探索活動によってなされます。その人にあった動きかどうかをこちらが決めて、それを練習してその通りに獲得することはできません。
でも、ついつい教えてあげたいと思っちゃいますよね。外から見てると、わかっちゃう気になるんですよね。ついつい、細かく「あーして、こーして」と言いたくなる。
いや、むしろ運動の仕方を伝授することがセラピストの役目ではないのかとすら思うかもしれません。運動や疾患について勉強してきたし、いろいろな症例を見ているし。クライアントにわざわざ無駄な試行錯誤をさせる必要はないのではないか?だんだん一理あるような気になってきますよね。
次回、自分たちが課題達成する時を例に、やはり行為者自身が探索し試行錯誤を重ねる必要があることを見ていきましょう。続く~