毎回5分で理解する「要素還元論」と「システム論」(その6)
システム論を基にしたCAMRは、人の運動システムの作動の特徴を基に運動システムと障害の理解とそのアプローチを導きます。
ここまでで「状況性」という作動上の特徴を基に「リハビリの内容」が決まり、と「同一課題での運動リソース交換可能性」という特徴を基に留意するべき点が分かりました。また「課題特定性」という特徴で、「リハビリの手段」が明確になりました。
今回テーマにする人の運動システムの作動上の特徴は、「自律的問題解決」です。
人の運動システムの基本的な作動の目的は、人にとって必要な課題を達成することです。つまり安全を確保したり、食事をしたりの必要なものを手に入れたりすることです。そのために人は探し、移動し、ものを操作します。
このやり方は、身体の内外に利用可能な運動リソースを探し、課題達成のためのそれらの運動リソースの利用方法である運動スキルをその場で生み出しては、何とか課題を達成していくわけです。
しかし課題達成になにか問題が起こると、その問題を解決して必要な課題を達成しようとします。
たとえば腰椎ヘルニアで疼痛が生じて動けなくなると、圧迫部分を逃すように逃避的な側彎が生じ体幹部を硬くして動きによる痛みを減らそうとする問題解決が行われます。
「おーい」と呼ばれると、人形のように体幹はそのままの姿勢で脚で踏み換えてふり向いたりしますよね。
また腓骨神経麻痺になると下垂足が起こります。このままでは歩行時につま先が床に引っかかって転倒の危険という問題があるので、膝を高く挙げる鶏歩という問題解決が行われます。片麻痺になると患側下肢の振り出しが困難という問題が生じます。そうすると体幹部の伸展や健側下肢への重心移動による「分回し歩行」という運動スキルによって問題解決を図って歩けるようになります。
これらの問題解決は、特に人が意識していなくても運動システムによって自動的・自律的に行われて、人はそのことを意識することはありません。問題が起こると本人が知らない間に運動システムが自律的に問題解決を図るわけです。
すると私たちは、元々の運動障害の現象に加えて、運動システムの自律的問題解決によって引き起こされる現象の混合状態を目にすることになります。
もし運動システムが自律的問題解決を図っていることを知らなければ、目にする現象は全て障害による現象、つまり全部を症状として見てしまうことになります。
特に脳性運動障害のように麻痺が広範囲・長期に渡って存在することになると、元の症状に加えてたくさんの問題解決による現象が同時に起きているわけで、これがしばしば脳性運動障害を誤解する原因になっているのです。次回からこの点を詳しく説明します。
また自律的問題解決のやり方はCAMRでは6種類に分類されます。以下の通り。
①探索利用スキル
②外骨格系問題解決
③不使用の問題解決
④骨靱帯性問題解決
⑤健康時の問題解決
⑥安心確保の問題解決
これらも次回から詳しく説明して行きます(その7に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!



毎回5分で理解する「要素還元論」と「システム論」(その5)
今回検討するのは「課題特定性」という人の運動システムの作動の特徴です。
これを知ると、リハビリをどのように進めたら良いのかがわかるようになります。
課題特定性というのは、課題達成のための運動スキルは課題そのものの遂行によって生まれ、修正される」という特徴です。わかりやすく言えば、「歩くための運動スキルは歩くという課題を遂行することによって生まれ、修正される」ということです。なんだか文章にすると「当たり前じゃん!」と行った感じですね。
でも臨床では、歩く練習をするために「椅子に座って四頭筋訓練をする」といったことはよく見られます。
これはやはり人の運動システムを機械のように見ているからでしょう。座位での四頭筋強化がそのまま歩行で活かされると考えてしまうのです。確かにロボットでは、膝を伸ばすモーターが壊れたら、それを交換するだけで元々設定された歩行が行えるようになります。つまり壊れたリソースを交換するだけで良いのです。
つまりロボットには運動スキルが無いのです。ロボットの「やり方」は予め決められていて、人の運動スキルのように状況によって自律的に新たに創造されたり、変化に対応して自然に発達したりするものではないのです。ロボットで考慮するべきはリソースだけで良いのです。
しかし人の運動システムでは、課題達成は運動リソースと運動スキルの二本立てです。座位で四頭筋の筋トレをすると筋繊維は太りますが、そのままでは歩行に役立ちません。増えた筋力という運動リソースをどのように歩行に使うかという運動スキルも筋力変化に応じて対応させ、発達させるための運動スキル学習が必要なのです。
少し前の話ですが、高校野球で「長打力をつけよう」と新たに筋トレを加えることがブームになりました。しかし実際に筋力だけ改善しても長打力が伸びるどころか、バッティングそのものが下手になるということが見られました。
筋力という身体リソースだけが変化すると、それまで使われていた運動スキルでは適切に対応できなくなるのです。だから変化した運動リソースに対応してうまく課題達成できるような新たな運動スキル学習が必要な訳です。
この場合も「打撃という運動スキルを進歩させるためには、変化した筋力を上手く使うための打撃という課題そのものをやっていく必要がある」のです。
というのも、ある課題を達成するための運動スキルを生み出すための情報リソースは、その課題の中にしかないからです。だから歩行をより安定させたいなら、歩行練習の中でより安定することを目標に運動スキル学習をしなくてはいけないのです。
実際に運動スキル学習を効果的に行うための課題の条件もわかっています。以下の3つです。
① 行為者本人が、必要な課題(行為者自身にやる意味や価値が感じられる課題)
② 行為者に取って達成可能な課題(少なくとも介助や環境リソースの工夫で達成できる課題)
③ 行為者自身がアクティブに実践・経験できる課題となります。 そうなると、セラピストにとって一番重要な仕事の1つは「課題設定」ということになります。
セラピストは患者さんにとって意味や価値の感じられる課題を提案する必要があります。それにその課題が修正や介助や環境リソースなどによって何とか達成できるように工夫する必要があります。また課題の実践や経験を通して、患者さんが意味や価値が感じられ、取り組む姿勢がより良くなるように援助する工夫も大事になります。
CAMRでは、セラピストが課題設定するための工夫や技術がいくつか用意されていますので、機会があれば講習会などを受けられると良いと思います。
さて、「状況性」と「同一課題のリソース交換性」という作動の性質で、医療的リハビリでやるべき内容が示されました。そして今回の「課題特定性」という作動の性質で、リハビリの手段が示されました。
そしてもう一つ考慮するべき「自律的問題解決」という作動の性質があります。これこそが脳性運動障害のリハビリでは一つのキモになります。次回からこれを少し詳しく説明したいと思います。(その6に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
毎回5分で理解する「要素還元論」と「システム論」(その4)
CAMRでの障害の理解は非常にシンプルです。
障害を持つとは、まず筋力や柔軟性、体力などや身体の一部を失うなどの身体リソースが低下・消失することです。また痛みは運動パフォーマンスを低下させますのでこれが強まることも筋力などの身体リソースを低下させます。
すると身体リソースの低下に伴い、利用可能な環境リソースが減少します。また身体と環境の関係性を示す情報リソースも減少あるいは不適切なものになってきます。結果として多様で柔軟、創造的な運動スキルを生み出せなくなり、様々な生活課題の達成力が低下することになります。これがCAMRで考えられる障害の状態です。
そうするとアプローチは、まず増やせる身体リソースをできるだけ増やすことになります。もし痛みがあれば、痛みはできるだけ改善することです。
また利用可能な環境リソースをできるだけ工夫して増やすことです。たとえば手動の車椅子は無理でも操作装置を工夫した電動車椅子なら利用可能かも知れません。
さらに増えた身体リソースや環境リソースを使うことによって、情報リソースをアップデートしたり、適応的な運動スキルを生み出したりする練習をすることになります。
このように「状況性」という作動の特徴からは、障害をどう理解するかとリハビリで何をするか、何を目標にするかがわかってくるのです。
また上に「増やせる身体リソースはできるだけ増やすことです」と述べています。要素還元論のアプローチでは、「悪くなったところを改善する」というアプローチをとるのが普通です。それが効率的であると考えられるからです。
でもCAMRでは、「悪いところを改善するのではなく、改善できる身体リソースはできるだけたくさん改善する」という方針を持ちます。どうしてでしょうか?
理由はやはり人の運動システムの作動の特徴にあります。人の運動システムには、「同一課題での運動リソース交換可能性」とCAMRで呼ぶ特徴があるからです。
これでよく挙げる例は、「立って靴下を履く」という課題です。通常健常者に「立って靴下を履いてください」というと、片脚立ちになりもう片脚を屈曲して両手で靴下を履くことが多いと思います。講習会でセラピストにこの課題を出すとほとんどの方がこうします。
そこで「もしその履き方ができないときはどうしますか?」と聞くと、多くの方が「片脚立ちができるように下肢と体幹の筋力強化とバランス練習が必要」などと答えられます。
おそらく多くのセラピストの頭の中には、「立って靴下を履くための標準的な(正しい)やり方」としてこの方法があるのでしょう。ちょうどロボットでは、設計者が考える正解の動きがあって、それができるように修理をします。要素還元論では自然にロボットを見るような目で人を見るようになるので、これもその傾向なのかも知れません。目標とするべき正しい運動があると無意識に思ってしまうのでしょう。
でもセラピストの中には、「壁にすがって靴下を履きます」と答える人もいます。つまり筋力やバランス能力といった身体リソースの代わりに壁という環境リソースを利用しても同じ「立って靴下を履く」という同じ課題を達成できるわけです。
僕の知っている95歳のおじいちゃんは、両脚で立ったまま、両手で靴下を広げて片脚の前に持っていきます。そしてまずつま先を挙げて靴下をかぶせると、次に踵を挙げて履いて見せます。筋力やバランス能力の代わりに体幹の柔軟性を交換しても課題達成できるわけです。
このように「立って靴下を履く」という同一課題を様々の異なった運動リソースに置き換えても達成できるのが人の運動システムの特徴の1つです。つまり人では、異なったやり方で同一課題を達成することは普通のことです。そのためにその時その場で多彩で柔軟、創造的な運動スキルを創出する能力を持っているのです。これがロボットと違う人の独自の作動なのです。
どのような運動スキルを生み出すかは、その人の運動システムがその時その場で出会う状況の中で創造的に生み出します。そして運動システムがどの運動リソースをどのように利用するかはセラピストにはすぐにはわからないことも多いのです。だって95歳のおじいちゃんが立ったまま靴下を履くなんて、なかなか想像できないでしょう? だから「改善できる可能性のある身体リソースはできるだけ改善しておく」ことです。運動システムの可能性を広げるためには改善できる身体リソースはできるだけ改善しておけば運動システムが思いもよらない利用方法を思いつくこともあるわけです。
もちろんセラピストも経験を積むうちに、たとえば「寝返りを筋力ではなく体幹の柔軟性と下肢の重さや重力を利用して寝返る」などを知ることになります。そのような理解が進むと、より効率的な身体リソースの改善を援助できるようになりますが、ともかくそれでも「できるだけ改善できる身体リソースは改善しよう」というのが基本方針であることに間違いはありません。人の運動システムは時に驚くほど創造的な方法を生み出すからです。(その5に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
毎回5分で理解する「要素還元論」と「システム論」(その3)
さて今回は、システム論では障害はどのように理解されるか説明してみます。
システム論を基に日本で生まれたCAMR(カムルと言います。Contextual Approach for Medical Rehabilitationの略。和名は医療的リハビリテーションのための状況的アプローチ)では、運動システムをその作動の特徴で理解します。
たとえば人の運動システムには「状況性」という作動上の特徴があります。これはたとえば歩行を見ると、普通の床面ではその人らしい様子で歩きますが、氷の上ではヨチヨチと小刻みに歩きます。水溜まりでは濡れないようにつま先立ちで浅いところを探しながら歩きます。狭い場所は横向きに歩きます。急な階段を上がるときは手を軽くついてバランスをとったりします。
つまり人の歩行は状況に合わせて様々に形を変えて歩行という機能を維持するような作動の性質を持っていて、これをCAMRでは「状況性」と呼びます。健常者では当たり前の作動の性質です。
この「状況性」という性質を可能にしているのは、人の運動システムの構造が「運動の形を無限に生み出し、変化させることができる」からです。CAMRでは、このような構造を「豊富な運動リソースを持ち、豊富な運動リソースと多彩で、柔軟で創造的に生み出される運動スキル創出力を持つ」と表現します。
運動リソースとは運動に利用され、あるいは運動に影響する資源のことで、身体そのものや筋力、柔軟性、痛みなど身体の持つ性質である「身体リソース」、環境内にある大地や構造物、人工物などのものや環境の持つ重力や明るさ、温度などの性質は「環境リソース」と呼ばれます。
また身体が環境内のものや性質に出会った時に生まれる意味や価値などの情報を「情報リソース」と呼びます。たとえば進む先に高さ60センチの段差があります。見たときに「手を使わずに踏み上がれる」と思えば手を使わずに踏み上がるでしょうし、「手が必要」と思えば手を使って上がります。つまりその情報リソースによって課題達成の運動あるいはやり方(運動スキル)が導かれているわけです。
健常な人では筋力や柔軟性、体力などの身体リソースが豊富です。そのために環境内の様々な起伏や明るさや温度の中でも適応的に動けるし、環境内の様々な構造物やものを利用・操作できます。つまり多くの環境リソースを利用できるのです。運動スキルとは「課題達成のための運動リソースの用い方」です。身体と環境との関係を意味する情報リソースが適切であれば、適切な運動スキルが多様に柔軟に、その時、その場で創造的に生み出されてきます。
これによって様々な状況の中で、必要な生活課題を色々なやり方で達成することが可能になります。
機械では予め運動の仕方は設計者の意図によって決まっています。またその通りにしか動きません。もし部品が壊れると、それを直して「元通りにする」しか修理方法はないわけです。
しかし人では予めやり方は決まっていないのです。その時の状況、たとえば体調が悪いとか、いつも使っている道具がないとかであっても、何とかできるようにやり方を変え、ある中から利用可能な他の道具を利用して課題を達成する方法、運動スキルをその時、その場で生み出すことができるのです。ここが人の運動システムの一番の特徴と言えるでしょう。
健常者は豊富な運動リソースと創造的な運動スキルの創出力を持っているので、必要な日常生活課題の達成であまり困ることはありません。CAMRでは、健常者のこのような能力を「生活課題達成力」と呼びます。
CAMRでは障害を持つとは「生活課題達成力が低下、あるいは消失した状態」と考えています。従ってリハビリの目的は、「生活課題達成力の維持・改善」と考えています。
CAMRから見た障害については次回詳しく述べます。(その4に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
毎回5分で理解する「要素還元論」と「システム論」(その2)
前回は学校で習う「要素還元論」とそれとは異なった視点の「システム論」を簡単に説明しました。お互いに異なった視点で物事を見ますので、理解もアプローチも異なっています。そしてそれぞれの見方には長所と短所があり、お互いに補い合うことができます。
今回からそれらを実際に詳しく検討してみましょう。
まずは「運動障害」をどう理解するかを2つの視点で比べてみましょう。
要素還元論では、人の運動システムはロボットの機械の体のように構造と各部の機能で理解します。この視点では、運動障害とはある部位の器官などが壊れて、その部位が持っている機能が失われることです。
それでアプローチは、機械と同じように「悪いところを探して治し、元に戻す」という方針を持つことになります。
このアプローチは、整形疾患の骨折や軟部組織の損傷のような傷害に対してはとても有効です。低下した筋力や可動域の部位を探し出し、筋力強化や可動域改善の訓練で改善し、元に戻ることも比較的多いからです。
医療的リハビリはこの分野で存在意義を認められた訳です。
更に要素還元論では、因果関係を用いて現象を説明します。たとえば「歩行不安定(という現象)が見られる原因は、両下肢の筋力低下である」と物事を単純化して理解することができます。これによって「両下肢の筋力強化をすれば良い」とアプローチが明確になります。これまた機械の修理方法と同じですね。 この説明はわかりやすく、複雑な身体の理解や障害に対するアプローチを単純化することができます。そのため運動問題の原因とそのアプローチを単純・明確に公式化することができます。
たとえばマニュアル・セラピーなどでは、膝痛という運動問題に対して原因を「関節内運動の低下」、「周囲軟部組織の短縮・癒着」、「周囲筋力の低下」などと分類し、原因を特定する評価法を定め、それぞれの原因に対するアプローチも公式のように定めることができます。
このように特定の要素を原因として因果関係を想定するやり方は、単純化・公式化されて、評価から治療までのアプローチを単純化・公式化してわかりやすくしてくれます。機械修理のマニュアル化と同じですね。これによってこれを習った誰もが、一定の治療効果を安定して生み出すことができる訳です。これはこの視点の非常に優れた点です。
一方で特定の要素を原因として決めてしまうため、その他の要素による影響を無視してしまう傾向を生んでしまいます。
たとえば腰痛を訴える患者さんに徒手的療法を施術し、痛みを改善します。患者さんは「痛みが軽くなった」と喜ばれます。そしてセラピストは「また悪くなったら来てね」と送り出すのですが、結局毎週この治療を繰り返すことになります。
この場合、痛みを生み出す身体的なメカニズムは徒手的療法によって改善されますが、その患者さんが日常生活では毎日同じ座位姿勢で長時間過ごし、運動をすることがないなどの生活習慣が元々の痛みの原因になっているといった多要素の影響によってこの痛みが生まれているという点が無視されがちです。
特定の要素を犯人としてしまって安心してしまうので、そこで思考停止が起こるわけです。最も経験を積み重ねてベテランになれば、広い視野で様々な要素の相互作用を考えるようになります。つまり独自に素朴なシステム論を発達させて対応しているセラピストはたくさんいます。
前回も述べましたが、要素還元論のアプローチとシステム論のアプローチは、お互いの弱点をお互いの長所で補い合うことができるのです。臨床のセラピストは自然にそれを一部自然に行っているわけです。
ただし脳性運動障害の分野では、このやり方はあまりうまくいっていません。悪いところは脳細胞なので、「脳細胞を再生させたり、他の脳細胞が失われた機能を代償させる」という方針で随分長い間アプローチしていますが、未だにそれで失われた機能が再生したり、麻痺が治ったりという科学的な報告はありません。
この場合、基になる原因が解決不可能だからです。あるいは原因が明確にならないときにはこの要素還元論を基にしたアプローチは壁に当たってしまうことが弱点なのです。
そんな場合には、システム論の視点が有効になります。次回はシステム論が障害をどのように理解して、アプローチしているかを説明します。(その3に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
毎回5分で理解する「要素還元論」と「システム論」(その1)
学校で習う人の運動システムは、構造と各器官・組織の機能として理解されます。まず人体の設計図を作って、構造と仕組みを理解するわけです。
たとえば筋肉は力を生み出します。そして骨格・関節・靱帯などで力に支持と方向を与えます。体の前面についた筋肉は筋の起始・停止を近づけて屈曲させます。背面についた筋は伸展させます。感覚器は身体や周りの環境内の刺激を受けて、神経を通して脳に伝えます。脳は受け取った感覚刺激から情報を生み出し、その情報を基に神経を通して筋に命令を送る・・・などと仮定された設計図ができる訳です。
特に脳の機能については、コンピュータをモデルに働きや役割を仮定されていることが多いですね。
というのもこの視点では、人体の理解の仕方はどうもロボットと共通の見方のようです。ロボットでは、力はモーターで発生し、躯体は硬い部品で作られますので可動性なども決まっています。感覚はセンサーで集め、電線を通じてコンピュータに送られます。つまり運動や活動を繰り返してもそれらモーターや躯体、センサーなどの各ユニットの性能が上がることはありません。(消耗によって性能低下はあると思いますが)
そのようなシステムでは、運動変化を起こしたり、運動を調節したりするのは全てコンピュータです。コンピュータに新しい運動プログラムがインプットされない限り、新しい運動変化は起きないことになります。つまりロボットではコンピュータだけが運動変化に責任を持っていることになります。
そして人の脳の機能や役割はまさしくコンピュータに喩えられて理解されています。それでロボットではコンピュータ、人では脳が運動変化に責任を持っていることになるのです。だから上記の人体の設計図では、「運動変化や運動の調節はほとんど脳の働きである」と仮定されています。
ところが人では、運動や活動を行えば筋力や柔軟性などが変化してきます。そうすると姿勢や運動も変化してきます。あるいは痛みがあると動きが変化します。とびきり良いことがあると重力に逆らって動きも軽やかになり、悪いことがあると重力に押しつけられたように動きが重くなります。単に体重(お腹の脂肪など)が増えても姿勢や運動は変化します。
つまり運動変化を起こしているのは脳だけではありません。一時的な変化も持続的な変化も様々な構成要素の相互作用から生まれてきています。
このように「運動変化がどのように起こるか?」と問いを立てて答える場合、設計図と各要素の機能を基に「脳が変化させている」の様に特定の要素で説明する立場を「要素還元論」と言います。現象を特定の要素に還元して(戻して)説明するからです。つまり学校で習う運動システムの見方は、この要素還元論の視点なのです。
この見方は、「因果関係論」で説明されることも多いです。「運動の変化は脳の活動が原因である」という風に原因と結果の関係で説明されるからです。
逆にある現象が「システムを構成する様々な要素の相互作用から運動が生まれる」というのがシステム論の視点です。
どちらの視点が正しいか、真実かという議論はナンセンスです。それぞれの立場から見ると、「そう見える」と言っているだけです。「地球上に立って天空を見上げると天動説は正しく、太陽に立ったと仮定すると地動説が正しい」ということです。
どちらの視点も「問題解決に有効だし、場合によっては有効ではない」だけです。現在、天動説は間違いと言われますが、大航海時代には天動説の知識は自分の位置を知るために十分有用だったわけです。状況によって有用か、有用でないかが決まるだけです。
要素還元論は、構造と各部の機能を基に運動システムを理解しますので、構造が傷害されても回復する可能性が高い整形疾患などではとても有効で効率的な視点です。まさしく「悪いところを探して治して元に戻す」というアプローチが展開されます。
しかし脳性運動障害のように脳や麻痺を治せないと壁に当たってしまいます。 そんな時はシステム論のようなアプローチが有効になってきます。
そして逆にシステム論にも弱点はあります。そんな時は要素還元論が弱点を補ってくれます。
今回のシリーズはこの2つの視点について詳しく検討してみます。(その2に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「リハビリのセラピスト」という仕事
リハビリ学院の同期生が還暦を迎えたので集まった。話を聞いているとみんなそれぞれに自分なりの理学療法・作業療法の進め方を身につけていることがわかる。
それで思ったのだが、リハビリのセラピストという仕事は、一から自分なりのやり方で自分なりの方法論を身につけて行くものだと思った。それぞれの方法論は実にその人らしさに溢れているからだ。
確かに学校で習ったこと、講習会で習った知識と技術でスタートしているが、やはりそれぞれの個性と職場環境でその後の展開は大きく違っている。
患者さんの笑顔がエネルギーの者もいれば、自分の一生の仕事として面白さを求める者もいる。興味のあることを中心に探求する者もいる。自分なりのやり方で40年近く自分なりの理学療法・作業療法の体系を作ってきたわけだ。
そんな話を聞いてとても嬉しかった。
というのも最近は「リハビリの仕事は面白くない」という若いセラピストの話を聞くことが多かったからだ。どの患者さんにも同じような訓練を繰り返したりしているわけで、まあ、工場の流れ作業のように同じ作業を繰り返しているように見える。自分の仕事が生み出す結果よりは、決められた手順を再現することが目的のように見える。これでは面白くないだろう。
実際に「リハビリの仕事は給料が安いから辞めて、工場に就職した」という話も聞いた。同じ流れ作業なら給料の高い方を選ぶわけだ。
最近はマニュアルだとかガイドラインだとかEBMだとか言われて「科学的に正しいやり方」が決められてしまっているようで、そこから外れにくくなっているのかもしれない。
僕たちの時代(約40年前)は、僕たちセラピストの卵に求められているのは、「生活課題の達成力を高める」などという非常にシンプルで具体的な結果であった。ただ「正しい方法」は学校で習うものくらいで、教科書通りにいかないことはすぐに実感したので、自分なりに結果を求めて、やり方を探し求めていた感じがある。なにをしたら良い結果が出るかを自分自身で考え、試行錯誤して生み出していたわけだ。
その良い結果とは、患者さんの笑顔であったり、活き活きとした表情であったり、単純にできなかった生活動作ができるようになることだった。自分なりに良い結果の基準も持っていたわけだ。
今は「正しいやり方はこうだ!」とか「効果のあるやり方は科学的に証明されている!」と周りの権威者達に決められ、与えられてしまうのかもしれない。なんだか「リハビリの結果より、方法の方が重要である」という錯覚が生まれやすいようだ。あまりに周りの大人達が自分の価値観を押しつけ過ぎなのだろう。リハビリ教育の高度化・専門化とはこんなことだったのかと思うと少し残念である。
「正しいやり方」を押しつけたところで、患者さんもセラピストもそれぞれの個性があって、その出会いの中で毎回異なったやり方が生まれるのが当たり前である。工場の流れ作業のように同じ部品が流れてきて、同じ動作を繰り返すと大体同じ結果に終わる仕事ではないからだ。
学校や講習会で得た知識は、自分の個性と毎回出会う異なった個性の患者さん達とのセッションを繰り返しては、自分なりのやり方が一から組み立てられていくわけだ。だからこそ一人一人がどんな結果を追い求めるかが重要なのである。
若いセラピスト達には、「生活課題の達成力の改善」のようなシンプルな結果を求めて、自分なりの方法論を試行錯誤しながら身につけていって欲しいと思う。
もちろん全て我流で一から始めるのは大変なので、大人達の意見を参考程度にすれば良い。色々と異なった意見も聞いて、自分なりのリハビリ訓練の体系を見つけていってもらいたいと願っている。そうすれば仕事は自然に面白くなるよ!(終わり)

【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
人の運動を「正しい」とか「間違っている」と言えるか?(その4 最終回)
もう一つ、「正しい運動」と言ってしまう原因は、健常者から障がいを持つ人に対する同化主義といったものが考えられる。「あなたたちの動きは良くないから、健常者の様にきれいに動きなさい。健常者の動きが正しい運動である。健常者の様に動けるように人一倍努力しなさい」という思想である。
「障がいを持つ」ということ自体が認められないわけだ。だからまるで麻痺が存在しないかのように、「(健常者の様に)歩きなさい!」と無茶を言う。「諦めるのは早い!頑張って続ければできるようになるのだ!」などというセリフを昔はよく聞いたものだ。
さすがに現在のリハビリの世界では、この同化主義に染まったセラピストはいないと信じたい。
それでも「麻痺があるからと言って諦めたらそこでおしまいだ。諦めなければきっと道が開かれる」といった意見は時々臨床でも見られる。
しかしこの考え方が日本に入ってきてから60年以上経つが、未だに麻痺が治ったという科学的報告はない。もちろん世界でもない。
この「諦めたらおしまい」という考え方は「ユートピアン・シンドローム」と呼ばれる。達成不可能な夢を追い続けるという行為で、理想の目標の実現よりはむしろ「理想を諦めないで努力し続ける」ということ自体に価値が見いだされているようだ。諦めないで続けることが目的となっている。それで患者さんの生活問題を早く解決しようとするのではなく、むしろ逆に生活問題をずっと維持し続けるという結果を引き起こしてしまう。
すでに家庭内の生活は自立しているものの、「正しい運動ができていない、間違った運動をしている」と言われて「まだ自分はダメなんだ、人前で歩くためにはまだまだ努力が必要なんだ」と訓練に没頭する患者さんもいる。
この場合、元々リハビリの仕事が何なのかを考える必要がある。
医療的リハビリの仕事は、生きていくために必要な生活課題の達成が困難な人の生活課題達成力を改善することではないのか。それによって生活の質を高める手伝いではないか?
もちろん麻痺が治って元通り健康になれば一番良いのだろうが、職業人として治るか治らないかは客観的に判断して患者さんに接するべきだ。
患者さん自体が「麻痺を治して元通りになりたい」と希望される場合でも、プロとして「リハビリで麻痺を治すことはできないが、今よりは歩行パフォーマンスを改善することはできます」などと言うべきだろう。実際に治せるという事実はないのだから。
決してリハビリの目的は、あるセラピスト達が考える「理想の運動、正しい運動」に近づけることではないはずだ。
そもそもこのセラピスト達の言う「理想の運動、正しい運動」というものがなんとも判然としない。たとえば「健常者の歩き方の形」だという。
そうすると僕のように一応仕事も社会生活も自立しているが、円背気味に歩く高齢者は正しくない歩行運動をしているのだろうか?どこかに無理がかかっている歩行だからとリハビリを受けるべきか?いや、もちろんそんな必要はない。健常な若者のように颯爽と歩いていなくても社会生活にも生活の質にもあまり影響はない。
さらに健常者の歩き方の形は状況に応じて適応的に変化するものだ。氷の上では小刻み歩行、水溜まりでは濡れないようにつま先立ちの尖足歩行、水田で足を泥から抜くときは抵抗を小さくするために下垂足の形、つまり鶏歩に見える。あまり運動をしない健常の方の片脚に重すぎる重りを着けると、振り出すために分回し歩行の形も見られる。状況に応じて形を変える作動が健常者の運動システムの特徴である。
麻痺があれば脚を振り出すために分回し歩行をする訳だから状況に応じて形を変えているので「分回し歩行は健常の運動システムが持つ作動である」と言うことになる。
なんだか特定のセラピスト達の価値観、CAMRでは「正しさ幻想」と呼んでいるが、それだけでものが言われているような場面に再々遭遇する。大変なことである。(終わり)

【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
人の運動を「正しい」とか「間違っている」と言えるか?(その3)
「運動変化は脳の役割」あるいは「脳が運動を変化させる」という立場がある。
その立場では、運動変化は基本、脳の変化でしか起きないので、アプローチは脳を変化させようとする。方法はいわゆる「適切な運動を行ってその運動感覚を脳に入力する」ということになるのだろう。
この考え方はロボットと共通するところがある。ロボットの体は金属やプラスチックなどの硬質なもので作られ、動力はモーター、体や周りの状態はセンサーで調べる。
運動を重ねても体やモーター、センサーは変化しない。だから運動を変化させるためにはコンピュータのブログラムを変化させるしかない。
そして人でも「運動を変化させる」とは「脳を変化させるしかない」と考えてしまうところが共通している。
人の脳はコンピュータによく喩えられる。コンピュータは人が作ったものに過ぎないのに、コンピュータをモデルに脳の機能が説明される。「入力」とか「出力」とか「プログラム」等で脳の働きを理解するのは、なんだか変な気持ちがするのは僕だけであろうか。
一方、「運動変化は筋力や柔軟性などの各構成要素の変化や構成要素間の相互作用によって起きる」という立場(システム論)もある。
人では運動を繰り返すと筋力や柔軟性が変化する。神経や筋、感覚器の活動性も変化する。時間が経てば体重や脂肪量も変化する。もちろん脳の活動性も変化するだろう。運動の様々な構成要素が変化するのである。運動変化はそれら「運動の構成要素の変化や構成要素間の相互作用が変化し、新しい運動状態が生まれる」と考えられる。
アスリートが体幹筋のトレーニングをしてパフォーマンスが変わったという報告がされるが、この場合は筋力や神経、感覚器の活動性が変化したからとも説明できるし、筋力や神経、感覚器の活動性の変化などが他の構成要素(運動による体重・脂肪量、脳の活動性など)との相互作用から新しい運動の状態が生まれた」とも説明できる。
たとえばThelenらの「新生児歩行の出現と消失」の現象の研究がある。それまでは脳が未熟だとか成熟したとかで説明していたわけだ。でもテーレンらは、下肢の脂肪量の急激な増加が新生児歩行消失という運動変化の原因としている。脂肪の増減でも運動は変化するわけだ。私たちでも脂肪の増加によって姿勢と運動パフォーマンスは変化する。(実際にはThelenらは動的システム論の立場から「原因」のかわりに「コントロール・パラメータ」という用語で説明している。因果関係の説明ではないのだが、ここでは意味が汲み取りやすいようにわざと「原因」と表現した)
システム論を基にしたCAMRでは、脳はコンピュータとは異なった作動と機能を持っていると考える。脳をコンピュータに喩えると、「運動は脳に蓄えられた運動のやり方(プログラム)によってコントロールされる」となるが、システム論の立場からは「運動はその時、その場の状況から様々な運動の構成要素間の相互作用によって適応的に生み出される」となる。(ちょっと説明が大雑把過ぎ(^^;))
脳性運動障害の方に運動を繰り返していただくと確かに運動パフォーマンスは変化する。だからといって「脳が機能的に回復した」とか「麻痺が改善した」とはこの立場からは言えない。脳だけが変化を起こしているとは言えないからだ。
機械は設計者の思い通りに動くことを期待される。つまり設計者の意図した「正しい運動のやり方」が前提としてある。だから人をロボットに喩えて見ていると、人にも正しい運動があると思ってしまうのかもしれない。
しかし人では個人の能力や身体状態、その時の状況変化に応じて課題達成のやり方は多様に変化する。もし麻痺があれば麻痺があるなりのやり方で動かれる。 だから健常者のやり方と違っているから「間違っている」と言ってしまうと麻痺のある患者さんは困ってしまう。麻痺を治せない僕のようなセラピストも困ってしまう。
麻痺のある体で何とか課題達成の運動スキルを生み出されているのである。だからまずは麻痺のある方のやり方を受け入れることが大事ではないか。その上でパフォーマンス改善の可能性を探っていけば良いのだと思う。
CAMRの視点では、筋力、柔軟性、持久力、装具や環境整備などの利用可能な運動リソースを増やし、その利用方法である運動スキル学習を促進して多様で柔軟な運動スキルを生み出せるようになることで運動パフォーマンスや生活課題達成力は改善すると考える。(その4に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
人の運動を「正しい」とか「間違っている」と言えるか?(その2)
「その運動は間違っている」というセリフにずっと悩まされてきたものだ。最初は実習地だった。臨床実習の指導者は、「その歩行は分回しという代償運動で良くないから、修正してあげなさい」みたいなことを言う。 その頃は僕もまだうぶだったので、素直に言うことを聞いたものだ。「代償運動は本来の正しい運動ではないから、間違った運動で悪いものだ。だからリハビリの専門家として、本来の正しい歩行のやり方を教えなくてはいけない」と素直に思った。
どうするかというと、「まっすぐに脚を出してください」とおよそ達成不可能な課題を出すわけだ。患者さんも最初は素直に「おお、その方が良かろう」と思われるのだろう、一生懸命にまっすぐに振り出そうとされる。しかし、元々できないから分回しだ。そうするとうぶな僕は一生懸命に修正しないといけないと思い、頻回に「まっすぐに、まっすぐに、まっすぐに!」と指示を繰り返すことになる。
そうするとそのうちに患者さんが爆発する。大きな声で、「やかましい!わかった!お前の言う通りまっすぐに出しちゃろう!だがその前にこのわしの不自由な脚を治せ!脚が悪くて思うように動かせんのじゃ!まっすぐに出そうと思うのにまっすぐに出せん!どうせえ言うんじゃ、わりゃあ!」と怒鳴られて立ちすくんだものだ。(「わりゃあ」は「お前」という意味の方言。この夢はそれ以来時々見るようになって、今でも見ることがある(^^;))
なるほど、言われることはもっともなことである。元々脚が動かないからそうしているのであって、口で指示したくらいでできるなら問題にもなっていないはずである。
そこでまた臨床実習指導者に質問することになる。すると実習指導者も「当たり前だ!口で注意するくらいでなんとかなるものか!お前は思った以上にバカだな!こうするのだ!」と以下のような理屈を説明してくれる。
患者さんの下肢が思うように動かないのは、姿勢が悪かったり、筋緊張の不均衡があったり、立ち直りなどの姿勢反応が弱まったりしているせいである。だから正しい姿勢を指導したり、臥位で立ち直り反応の促通をしたりするのだ。良い姿勢で立ち直り反応が改善すると筋緊張の不均衡も改善して、きれいに患側下肢が振り出せるようになるのである!
「どうだ!参ったか!!」実習指導者は口ではなく、態度でそう示してきた。僕は思わず「おお!おおっ!なるほど、なるほど!」と思い、「参りました!」と心のなかで呟いた。
そして見よう見まねで実習指導者のやっていることを必死に真似したものである。それで何か変わったかと言えば、何も変わらなかった・・・(^^;)
実習指導者曰く、「お前はまだまだ技術が未熟である。これからもっともっと修行をしなくてはならん!」と老師風に諭す。
僕は思わず、「はっ!はっ!ははっ!」と心の中で答えた。「俺は・・・俺はとんでもない未熟者である!だから必死こいて修行しなければならんのだ!・・・ならんのだ!」
今思えば僕もうぶであった。何とか頑張ろうとしたが、結局自分でも何をどうやれば良いのか全然わからなかった。
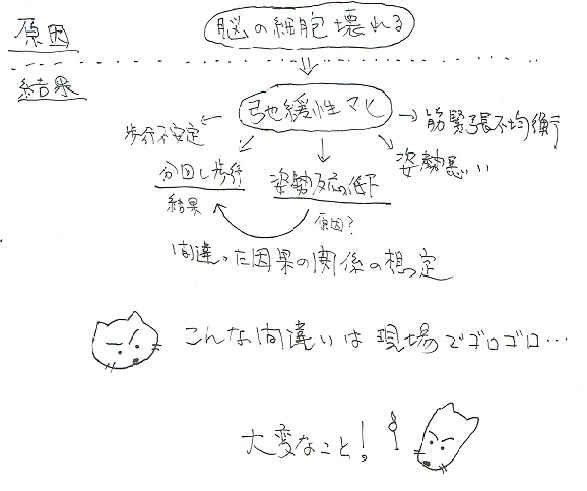
それに後から考えると、姿勢が悪かったり、筋緊張の不均衡があったり、姿勢反応が弱まったりしているのも結局は、脳細胞が壊れて弛緩性マヒが出ているからである。つまり力が出ないからだ。だから姿勢が悪くなり、筋緊張が不均衡になり、姿勢反応が弱まるのだ。だからマヒ側の脚も振り出せない。
やややっ、あの実習指導者、結局、因果の関係を間違っているではないか!原因は脳細胞が壊れてマヒになったことである。その結果、姿勢が悪くなったりしているし、脚も振り出せなくなっている。仕方なく患者さんは、健側の上下肢や体幹を使って何とか患側肢を振り出しているのでそれが「分回し歩行」となっている。
「姿勢や姿勢反応が悪いから脚がまっすぐでない」という理屈は、結果同士の間に間違った因果関係を想定しているわけだ。
こんな簡単な理屈は学校で習いたかった。そうすれば実習地であの指導者に馬鹿にされることもなく、逆に「因果関係の想定が間違っていますよ」と言い返せたのに。
しかし意外にもこんな簡単な間違いや誤解が臨床ではゴロゴロしているのである。 大変なことである!(その3に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!













