臨床問題解決能力アップへの近道☆CAMR関連情報ランキング!
CAMR基本テキストリハビリのコミュ力

すぐに役立つ知識を学ぶ!
人の運動システムの特徴に基づくアプローチで、すぐに使えるベテランの臨床知を簡単に学べます!
詳細はこちら
CAMR公式 Facebookページ

最新のCAMR情報を更新!
講習会のご案内や、CAMR研究会からのメッセージなど、CAMRの最新情報が最速で得られます!
詳細はこちら
CAMR公式 ホームページ
CAMRのすべてがわかる!
基本概念から活動記録まで、CAMRをもっと知りたい方へ。関連論文やエッセイも多数掲載しています!
詳細はこちら
運動リソースを増やして、運動スキルを多彩に生み出す(その4)
-生活課題達成力の改善について
ここでは人の運動システムが持つ素晴らしい能力が「運動スキル」であると述べてきました。運動スキルとは運動のやり方、筋群の収縮のタイミングや力の強さを憶えて運動の形を正確に再現する運動プログラムのようなものではないということを前回説明しました。
CAMRでは運動学習は、課題達成に向けて生み出される協応構造とそれを調整するための運動認知からなります。運動学習とは「運動リソースを利用し、課題達成の方法を生み出し、修正・熟練する」ことなのです。
そうすると運動学習は二段階に分かれていることがわかります。わかりやすいように具体的に片麻痺患者さんの分回し歩行について説明します。
片麻痺患者さんがT-caneを突いて立位保持ができるようになるといよいよ歩行練習が始まります。患者さんは思いきって足を振り出そうとします。通常立位での重心移動練習をやった後、患側下肢に支持性があると健側下肢は振り出せます。しかし麻痺の程度によって患側下肢の振り出しは難しいことも多いです。
そこで患者さん自身による患側下肢振り出しのための探索活動あるいは試行錯誤が始まります。利用可能な運動リソースを探して試すということが少しの間続きます。その結果、健側下肢に大きく重心移動して患側下肢を浮かせながら、体幹の側屈や回旋によって軸足を中心に健側下肢を前方に振り出すやり方を発見します。つまり分回しです。
これが患側下肢を振り出すための協応構造の発見ですね。しばらく色々と患者さんはこれを使って歩かれるようになります。そうなると協応構造はある程度安定しながら次の段階に入ります。
それはこの分回し歩行のための協応構造を色々な状況の中で試して見ます。様々な状況変化に対応するための運動認知の修正と熟練のための段階に入るわけです。これまで述べたように身体の状態は毎回変化します。分回し開始時の重心移動の程度や体の硬さも変化します。患側下肢振り出しの開始位置や全身の構えなども毎回変化します。時には患側下肢の着地点は健側下肢に近すぎて基底面を狭くしてバランスを難しくするかも知れません。時には離れすぎて大きく重心移動する必要が生まれるかも知れません。
それでも様々な状況で患側下肢の振り出しを調整しては、安定して歩けるような運動結果に落ち着くように運動認知学習をする訳です。
つまり運動スキル学習は基本的に患者さんがこのように主体で行うものです。だってセラピストには何がどう起きてどう調整するかの過程は全くわからないからです。セラピストは課題を出してその目に見える結果を判断するのです。
従来の運動学習のアイデアのように「脳内に運動プログラムを学習させる」と考えていると、運動学習はセラピストが「正しい運動を指導して憶えさせること」と考えがちです。そして彼らが「正解の運動」と考えるもの、つまり健常者の歩行の形をまねるように課題として出します。もちろん麻痺があるのでできないわけで、そうすると感覚入力学習と言って「他動的に手脚を動かす」とかタッピングなどをします。
脳をコンピュータの様に考えるので、他人がプログラムを入力するように、他動的に正しい運動を繰り返して感覚入力すれば「正しい運動を学習する」と考えているようです。
でも他動的に動かした運動が憶えられるなんて事実はこれまでも発見されていません。あくまでも幻想に過ぎません。
誰でもわかることですが、子ども時代から人は自ら動くことによって様々な課題達成方法や問題解決方法を生み出し、熟練させているのです。自律的に動く以外に運動スキル学習は起きないのです。
運動スキル学習の取りかかりは課題達成のための協応構造の発見に。発見後は様々な状況に対応して協応構造を上手く調整するための運動認知学習に充てることです。
次回は「運動リソースを豊富にし、運動スキルを多彩に柔軟に生み出す運動スキル学習」の方法について述べます。(その4に続く)
※毎週木曜日にはNo+eに別のエッセイを投稿しています。最新のものは「自律的問題解決とは?(その3)」です。こちらもよろしく!以下のURLから。https://note.com/



運動リソースを増やして、運動スキルを多彩に生み出す(その3)
-生活課題達成力の改善について
CAMRで言う「運動スキル学習」とは、ベルンシュタインやギブソン、リード、テーレンらの生態心理学やシステム論の視点とアイデアを基に組み立てられています。
これまでの伝統的な運動学習では次のようなことが考えられていました。
「運動を正確に安定するように熟練するには、莫大な繰り返しの運動が必要である。これは休んでいる神経回路は土の詰まった溝のようなもの。これに水が通るようにするには何度も何度も水を流す必要があるからだ。そうすると水が勢いよく流れるように神経はよりスムースに命令を届けることができるのだ。
そうすると何が起こるか?より素早く正確に運動を繰り返すことができるようになるのだ!」
まあ、大雑把過ぎですがこういうことです。
簡単に言うと従来の運動スキルとは運動のやり方、筋群の収縮のタイミングや力の強さを憶えて運動の形を正確に再現するための運動プログラムのようなものであるという風に考えられています。
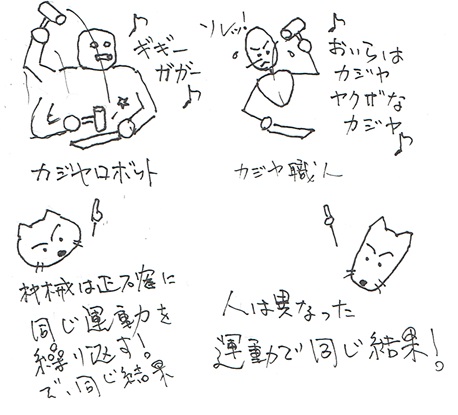
これに最初、異を唱えたのがロシアの運動生理学者、ベルンシュタインです。彼は職人の熟練した技、たとえば釘の頭をトンカチで叩く動作の軌跡を記録したのですが、毎回微妙にずれるのです。
それで以下のように結論します。運動学習とは毎回正確に同じ動作を繰り返せるようにすることではない。毎回少しずつ異なった運動で同じ結果を生み出すための微調整のやり方を学ぶことなのだ、と。
機械は同じ動作を正確に繰り返します、というより一つの動作しかできないのです。同じ動作しかできないように各部品の動きや全体の動作を厳密に制限しているのです。
ところが人の体はゴムの様な粘性や弾性の性質を持っています。温度が変われば筋の伸びも変わります。人の体は環境や状況によって緊張具合も力の入れ方、運動の開始の状態も微妙に変わります。心理状態によっても相当影響を受けます。関節も緩い。人の心身の状態は常に微妙に変化しているわけで、そもそも同じ運動を正確には繰り返せない構造なのです。
そんな体で毎回同じ結果を出すには、釘の頭を叩く直前の予期的知覚情報によって運動結果の微調整をするしかないのです。毎回異なる運動で同じ結果を生み出すための予期的知覚情報こそ重要であり、その利用方法こそたくさんの経験を積む必要のある難しい技術であると考えた訳です。
また課題をどんなやり方で達成するかという基本的なやり方、たとえば「飛んできたボールをバットで打つ」やり方の基本となる形はすぐに生まれるものです。小さな子どもにバットを持たせてボールを投げてやるとあてられないものの「ボールを打つ」ための運動の形はすぐにそれらしいものが生まれます。このような課題達成のための基本的な運動のやり方はベルンシュタインによって「協応構造」と呼ばれています。
ベルンシュタインにとっては、運動学習とは「課題を達成できそうな協応構造を生み出し、それによって安定的に課題達成するための予期的知覚情報の使い方を修正・熟練させて適正な結果を導ける能力を学習するということになります。
CAMRでもそれを基に、運動スキルとは、運動の形を正確に憶えて再現するための運動プログラムのようなものではなく、課題達成に向けて構成される協応構造とそれを調整するための予期的知覚情報(CAMRでは「運動認知」と呼びます)からなります。運動学習とは単純に「やり方を憶えて再現する」することではなく、「課題達成の方法を生み出し、修正・熟練する」ことなのです。
まだまだ運動スキルについての説明は続きます。(その3に続く)
※私見ですが、ベルンシュタインの予期的知覚情報はギブソンのアフォーダンスとも共通すると思っています。
※運動学習についてのベルンシュタインやギブソンらのアイデアは、拙書「リハビリのシステム論-生活課題達成力の改善について(前・後編)に詳しい説明を載せています。以下のURLから。https://www.amazon.co.jp/dp/B0BNFQ95Q5
※毎週木曜日にはNo+eに別のエッセイを投稿しています。最新のものは「自律的問題解決とは?(その2)」です。こちらもよろしく!https://note.com/
運動リソースを増やして、運動スキルを多彩に生み出す(その2)
-生活課題達成力の改善について
学校で習う運動システムの構成要素は筋肉が出す筋力、骨・関節・軟部組織などから生まれる柔軟性、エネルギーを供給されながら動き続ける持久力、感覚器と神経系で感じられる感覚など、目に見える構成物から生まれるものとして考えられます。そして運動システムの構成要素である筋力、柔軟性、持久力、感覚などのうち、悪くなった構成要素を改善することで運動能力が改善すると考えます。
それで歩行不安定において下肢の筋力低下が見つかると、下肢の筋力強化をするわけですが、それを「座位姿勢」で行うことは普通に見られます。
というのも学校で習う要素還元論の視点は、機械を修理するときの考え方でもあるからです。機械は壊れた部品を治すか交換して元の状態に戻せば、その本来の力を発揮します。どんな風に直すかは問題ではありません。
機械と同様に、人でも筋力低下が起きていれば座位でも臥位でも、ともかく筋肉を太らせれば筋力は元通り改善し、歩行も改善すると考えます。それで座位でも臥位でも構わずに筋力強化すれば、元通り安定して歩けるようになると考えるわけです。
でも人の運動システムには「運動スキル」という機械にはない能力が備わっています。
筋力、柔軟性、持久力、感覚などの構成要素は、CAMRでは「運動リソース(運動の資源)」と呼びます。運動スキルとは、課題達成のための運動リソースの使い方です。
筋力などの運動リソースが改善するだけで運動能力や必要な課題達成力が改善する訳ではありません。むしろ運動リソースが改善しなくても、運動スキルが変化することで運動能力はアップするのです。
たとえば筋ジスの子どもたちでは大関節の筋力という運動リソースが低下しても、運動スキルが工夫されることで歩行能力を維持していることがわかると思います。
機械ではその構成要素の役割や作動、そして全体としてどう作動するかはきっちり決められています。決められた作動しかできないのです。状況が変化してもやり方を変えることはありません。機械では運動スキルがなく、人の運動システムで言う運動リソースだけがきっちりと一つのやり方が決められて組み立てられているわけです。印刷機のような巨大で複雑な機械でも、各部品にしても全体にしてもその作動は一つなのです。
つまり人の運動システムにおいては、その作動は運動リソースと運動スキルの二本柱で作られているのです。人の運動システムを機械と同じように理解していてはダメなのです。
前回、「筋の特異性」と呼ばれた性質について触れました。背臥位で上腕二頭筋の筋力強化を行うと背臥位での筋力は増加するのですが、座位になると改善が見られないことが知られています。単純に筋を太らせることが重要なのではありません。力の出し方やその大きさ、つまり運動スキルがどう作られるかが重要なのです。
背臥位での筋力改善は背臥位での運動スキルとして学習されているので座位ではその効果はすぐには反映されないのです。運動リソースを改善すればそれでオッケーと言うわけにはいかないのです。
座位で大腿四頭筋の筋繊維を太らせても、立位や歩行では前進の筋肉との協調や基底面・重力の関係は変わってきますので、すぐに歩行などの体の使い方には反映されないため、改めて歩行の運動スキルを学習し直す必要があります。
時間を節約することを考えると、立って歩くためには立って歩く中で筋力強化をしながら運動スキル学習を行ったほうが効率的なのです。
CAMRでは必要な課題達成のための運動スキルを学習しながら、その中で運動強度を上げて筋力強化を行うように工夫します。また運動スキル学習は、課題の達成の過程で「状況や条件の変化を多様に起こして課題達成を促す」ように工夫します。これがとても重要です。
と言うのも「運動スキル学習」というと、「同じ運動を同じ条件下で繰り返すことが必要」とよく誤解されています。以前の運動学習のアイデアでは、「働いていない神経は土の詰まった溝のようなもの。これに水を何度も通して溝の通りをよくする」という喩えで考えられていましたが、これがそもそもの大きな誤解の元です。
次回はCAMRで言う「運動スキル」と従来の「運動学習」のアイデアの違いについて詳しく説明できればと思います。(その3に続く)
※毎週木曜日にはNo+eに別のエッセイを投稿しています。最新作は「自律的問題解決とは?(その1)」です。以下のURLから。https://note.com/camr_reha
運動リソースを増やして、運動スキルを多彩に生み出す(その1)
-生活課題達成力の改善について
健康な若い人の単純な骨折では、「怪我をする前の健康な運動状態に戻す」という治療方針を持つことになりますね。これは治療によって骨折が治り、ほぼ元の状態に戻すことが可能だからです。
一方で脳性運動障害のように、麻痺を直すことができないと「元の健康状態に戻す」という目標は達成不可能となります。そうなるとリハビリの目標は、「現状達成可能な範囲で運動能力を改善し、患者さんが必要とする生活課題が達成できる」という目標を持つと思います。
実際、脳性運動障害を見る多くのセラピストはこの方針でリハビリを進めていると思います。
CAMRでも、単純な骨折の様な元に戻すことが可能な傷害では、元の状態に戻すような方針を持ちますし、脳性運動障害で元に戻れないときは、今可能なできるだけ良い状態に持っていくことを目標として考えます。
ではCAMRが従来の学校で習うようなアプローチと違うのはどんな点かというと、CAMRでは「運動課題達成力は、運動リソースと運動スキルからなる」と考えていることです。
従来学校で習うアプローチでは、筋力や柔軟性、持久力、感覚などは運動の基本的構成要素と考えられています。歩行不安定が見られると、これらの構成要素を調べて低下した要素を探して改善します。たとえば両下肢の筋力低下が見られると、「両下肢の筋力強化」を行います。
CAMRで理解する運動システムは、皮膚を境界とするのではなく、「身体と環境からなる」と考えます。そして構成要素ではなく運動リソース(運動の資源)として考えます。
(どうしてこうなるかはシステム論の視点から生まれます。学校で習う視点は目に見える構造として運動システムを考えるため「皮膚に囲まれた身体」が運動システムであると理解しますが、システム論を元にしたCAMRでは、その時、その場でシステムの作動に参加するものが運動システムを構成すると考えますので)
運動リソースは身体リソース(筋力、柔軟性、持久力、感覚など)と環境リソース(大地や構造物、家具、道具、他人や動物など)に分類されます。
また身体リソースが環境リソースに関わるときに生まれる意味や価値は「運動認知」と呼ばれます。(以前はこれを「情報リソース」と呼んでいました(^^;))
たとえばあなたが目の前の幅1メートルの溝を渡ろうとすると、「跨いで渡れる」や「渡れない」、「助走をつけると渡れる」などの課題遂行の結果や手段などの予期的な運動の認知が生まれますよね。これが「運動認知」です。これを元に課題達成の運動が導かれるわけです。
そしてこの運動認知を用いて課題を達成するための運動方法が「運動スキル」です。運動スキルは、身体リソースや環境リソースの課題達成のための用い方です。
学校で習う視点では、構成要素である筋力、柔軟性、持久力などを中心に改善することで運動能力が上がると考えます。だから歩行能力を改善するために、座位で下肢筋力を改善したりします。座位で筋力を改善すれば、自然に歩行能力は改善すると考えるわけです。運動スキルの概念がないのです。
一方CAMRでは、歩行スキルの中で全身の筋力を改善する必要があると考えます。その理由は「筋の特異性」と言われる性質によります。(その2に続く)
運動の専門家って・・・何?(その4)
前回は、セラピスト教育の中で「若い健常者の平地での歩行の形」を「正しい歩行」として基準や目標にするようになると述べました。
学校ではビデオの運動観察によって患者さんの歩行を見ます。学生は「歩き方が変」とすぐに気がつきます。「歩き方は変だけど、安定して歩いている」という評価はなかなかしないものです。教官も「歩き方が問題である。健常者のものとどれだけ違っているか」と健常者の形の違いに焦点を当てがちです。形の違いは見つけやすい。
つまり教官は学生に「麻痺があってもこのような分回しスキルを用いて、安全・安定して移動課題を達成できている」と別の視点を教えることはないし、学生も理解が難しい。「だって格好がおかしいからダメでしょう」と素直に言う学生もいます。
ともかく運動観察は健常者の歩行との形の違いに焦点を当てて学習することになります。教官も学生もその方がわかりやすい。
教科書などもそれを強めます。たとえば分回し歩行は「代償運動」とか「異常歩行」のようなレッテルを貼って説明します。健常者とはやり方あるいは見た目の形が違っているだけのことなのですが、まるでそれが障害の特徴であり、障害の理解であるかのような印象を与えます。
そうすると障害の理解は「姿勢・運動のやり方や見た目の形の違いと理解できる。だから姿勢・運動のやり方や見た目の形を健常者のやり方や見た目に近づけることがリハビリである」といった誤解を学生に与えているのではないかと思います。
実際にそんなセラピストによく出会います。片麻痺の患者さんの歩行を観察しては、「蹴り出しがない」とか「脚をまっすぐに振り出して」とか言って柔軟性を部分的に改善したり、特定の筋群の活性化を図ったりして歩行の修正らしきものをしています。見た目の健常者の違いを単に健常者の形に近づけようと意図しているだけです。訓練は、片麻痺患者さんの歩行のやり方と形を変えることが目的です。
やはり若いセラピストにとってみると、障害とは「異常な形で歩行をする」ことであり、リハビリとは「異常な形の歩行を健常者の歩行に近づけることと考えてしまうのでしょう。
つまり極端に言えば「障害=姿勢・運動の形の異常」なのです。どうもそれ以外の視点を持ちにくくなってしまうようです。これが前回言った、「障害の問題を姿勢・運動の形の問題に矮小化している」ということです。
僕自身も臨床に出た時はそんな感じでした。しかし臨床経験豊富なセラピスト達に接する過程で、それは単に見た目の運動の形のことを言っているだけで、それよりは大事な別の視点があると気づかされます。
たとえば歩行の安全性は?持続性は?そして実現可能な運動変化か?さらに患者さんが自らの生活を送る上で必要な生活課題を達成することができるか?どの程度の困難を伴うか?どんな工夫が患者さんの課題達成を助けるかといった視点で歩行を見ることもできます。
つまり何を問題にして障害を見ていくかということです。姿勢・運動の形はもちろん参考になるのですが、それ以外にも見るべき重大な視点、改善するべき点は沢山あるのです。
でも教える教官にとっても、教えられる学生にとっても一番わかりやすいのは形の問題であり、そればかりが頭に残ってしまいます。
実は僕自身、臨床経験4年ほどで教官になってしまって、そんな安易な授業をしてしまった反省があります。特に教えるのが難しいと、ついつい楽な方法を選んでしまって(^^;)
しかし今考えても学校の授業ではどんなに頑張っても限界があります。どんな人も実際の患者さんを見ながら経験を積んでいく過程で初めて得られる視点や理解があります。新しい視点を身につけるとはそういうことなのでしょう。
職場に経験豊富なセラピストがいればラッキーですが、先輩のセラピスト達が皆揃って「障害とは姿勢・運動のやり方や形の異常である」と考えていると、その矮小化した視点しか持てなくなってしまうようです。まあ、大変なことです。
実際に卒業してからも様々な研修や講習を受けて、職場以外での視点や理解を広げていく必要がありますね。(その5: 最終回に続く)※毎週木曜日にはNo+eに、別のエッセイを投稿しています。 最新の投稿は「『正しさ幻想』はどうして生まれるのか?」 以下のurlから。 https://note.com/camr_reha