「代償運動」って本当に悪い?(その1)
「代償運動」の「代償」の意味は、広辞苑によると「(比喩的に)ある目標を達成するために払う犠牲や損害」とか「本人に代わって弁償代弁すること」とか「直接実現できない目標を他の類似したものにおきかえて欲求を充足させること」などがある。そうなると「代償運動」で意味されるのはおおよそ「(犠牲や損害を伴う)問題のある運動」だったり、「本来の運動ができないので代わりの運動」といった意味になるのだろう。つまり「あまりよろしくない運動」というイメージである。
実際、学校を卒業したばかりの新人さんなどに聞くと、やはり「代償運動は悪いことなのでやめさせた方が良い」などと答える。
いや、新人さんばかりでなくベテランセラピストの中にも「代償運動は今は良くても、特定の部位に過剰な運動を強いることでやがて歪みを大きくし、変形・痛みなどの原因になるから、なんとしても修正するべきである」とか「本来の正しい運動をできるように修正するべき」などという方もおられる。
「そうか、そんな風に考えると代償運動は悪いものに違いない」と思う。
たとえば歩行時に膝に痛みを訴える方がいる。最近屋外歩行を始めたら、膝が痛くなったと言われる。近医を受診したら「変形性膝関節症」の診断名がついた。若いセラピストは困ってしまう。「膝が変形したのだから仕方がないとは思うが、何とか膝をよくできないものか?」といった相談を受けることも多い。
こんな時はあまり詳しい説明はしないで、「まず足部の小さな関節のモビライゼーションと足関節のストレッチを十分にしてみて。それでダメなら言って」などと伝える。
そうすると最初のアプローチで「膝の痛みが軽くなった、良くなった」と経験することも多い。「全身の各部位は影響し合う」ということを実際に経験するには良い機会だと思っているのでそうしている。
すると若いセラピストが「あれで膝が良くなったんですね」などと言う。まあ、単純・素朴にそんなことを言う。
こんな時に「代償運動」という言葉は便利かも知れない。以下の通り。
「いや、厳密に言うと膝を治したわけじゃない。あくまでも膝痛の原因の一つとして考えて欲しいが、この方の全身の動きを見ると硬くて各関節の動きは小さくてやや小刻みな歩き方をされる。こんな方は特に足関節や足部の柔軟性などが低下していて、大地の凹凸を上手く足部で吸収できていないことが多い。それでは歩行が不安定になるよね。
そして最近になって屋外歩行を始められた。それで大地からの起伏を吸収して体幹を安定させるために足関節の代わりに膝関節が頑張って過剰に働いて負担がかかっている可能性がある。つまり足関節がうまく機能していないから、膝関節での『代償運動』で揺れを吸収している。
そこでまずは足関節と足部の柔軟性を改善してみる。すると足部が大地のデコボコに上手く適応するようになるので、膝の『代償運動』が過剰に使われなくなり、痛みが軽くなった可能性がある。これがダメならまた次のポイントへアプローチする」
などと説明する。こうするとやはり代償運動は悪い運動で修正するべきとなって、わかりやすいのかも知れない・・・・・いや、たまたまこれが良い例であるに過ぎない。
臨床ではこのように説明に便利な場面が希にあるという理由だけで、この「代償運動」=「好ましくない運動」という図式が当たり前になっているのではないか。この単純な図式によって、実は様々な弊害が生まれているのではないか。どういうことか?
次回からこの「代償運動」という言葉を色々な角度から検討してみたいと思うのだ。(その2に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!



続・歳のせいと言う勿れ
以前、「歳のせいと言う勿れ」というシリーズで、「『歳のせい』は諦めを生む呪文である」みたいなことを書きました。
「歳のせい」と言われると「ああ、それじゃ仕方ないわよね」と諦めの気持ちを生んでしまいます。
実は最近、頻尿と残尿・尿漏れを続けて経験しました。それで、思わずこの呪いの言葉を口にしそうになりました(^^;) しかし、よく考えてみると、退職以来おしっこを我慢することがとても減っています。行きたい時に行きたいだけ行きます。回数も増える。きっと膀胱の弾力性が減って小さくなっているのだと思います。歳のせいと言うよりは生活習慣が原因。
またデイケアで働いていたとき、「男は立ってするからトイレが汚れるのよ」と女性スタッフから言われました。僕も「そうだな」と思ってそれ以来座ってしているのです。しかし座っているとどうも気張る感じが自然に消えてしまいます。
それで歳のせいではなく、生活習慣で括約筋とか腹横筋などが筋力低下をしているのだと仮説を立てます。
そこで一念発起、自分なりに筋トレを始めました。おしっこを我慢したり気張って出すようなイメージでいろんなところに力を入れては抜いてを繰り返します。また絞り出すテクニック(^^;)もいくつか工夫します。
効果は割と早く出て、パンツを濡らすこともなくなりました。「歳のせい」という呪文によって、危うく「尿漏れ対応パンツ4枚組」を通販で買うところでした(^^;)フゥー、めでたし、めでたし!
これに気を良くして、最近テレビを見ていて有名タレントや俳優の名前が浮かばなくなっているのも「歳のせい」ではなく、短期記憶のトレーニングが足りないのでは、と仮説を立てて早速憶える練習を始めました。
テレビCMでよく知っている俳優が出ています。「誰だっけ?」と思うものの名前が出ません。妻に聞くと「松山ケンイチじゃないの!」と言われます。「ああ、そうだ!大河ドラマで徳川家康の知恵袋と言われる本多正信を演じている松山ケンイチ君である」と関連知識と一緒に憶えます。こうすると記憶が定着しやすいとか・・・
翌日またそのCMがあります。妻がキッとこちらを向きます。しかし出てこない、名前が全然浮かばない。「大河ドラマで・・・」の関連知識しか浮かばない・・・・焦ります(^^;) 妻が「松で始まる俳優!」とヒントを出します。 「あっ、あっ、なんか出そう」と思います。「松、松、松平健!は違う・・・松、松、松原智恵子はもっと違う・・・松、松、松井秀喜!(^^;)」 結局、ギブアップです。昔憶えた名前しか出てこない(^^;) つまり、「歳のせいと言う勿れ」の道はとても険しいのだ!(終わり)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「麻痺は治る」と主張される人へ(後編)
さて、前回は脳性運動障害では運動パフォーマンスの改善や悪化などの変化の原因は、脳の働きの良し悪しとして説明される訳で、これが要素還元論の特徴であると述べた。
関係する要素群の中で一番重要な原因となるような要素、たとえばここでは「脳の働き」に運動パフォーマンス変化の原因を還元(より基本的と思われる要素に戻して説明)するわけだ。
これをシステム論の立場から見ると、「運動パフォーマンスは、様々な要素の相互作用によって生まれ、安定する」ということになるので、上のような単純な因果関係の説明ではなくなる。
たとえばシステム論では歩行パフォーマンスの改善の説明の一つは、以下のようないくつかの要素あるいは運動リソース(運動のための資源)間の相互作用として説明されるかもしれない。
訓練を通して、
① 体幹や股関節などの柔軟性の改善による運動範囲、重心移動範囲が改善する② 健側上下肢、体幹の筋力改善が起きる
③ 麻痺側下肢の筋力改善(研究によると麻痺があっても筋トレによる改善効果は数%見られる)も起きる可能性がある。麻痺自体が改善するという意味ではない④ 患側下肢の支持性の改善(電気的な筋活動が見られなくても、キャッチ収縮のような筋電図上で測定できない筋張力の増加現象が知られている)
⑤ 様々な身体活動を経験することにより、患側下肢の支持性が思った以上に良いと認識する、つまり経験的に次第に麻痺側下肢を使えるようになる(情報リソースのアップデートが起こる)
そうするとそれらの要素(運動リソース)間の相互作用として、以下のようなことが起こり得る。
まず患側下肢の支持性が増してくる。さらに患者が麻痺側下肢に体重を繰り返しかけることによって「麻痺側下肢は意外にしっかり支えてくれる」と認知すると、患側下肢での荷重時間の延長が起こる。そうすると広がった可動域や重心移動範囲の拡大と共に健側下肢の筋力改善による蹴り出しにより前方へ大きく振り出せるようになる。筋力とバランス能力の改善によって体幹の安定性なども増している。
その結果、体幹の前方への推進力が高まり、歩行速度も上がる。自然に患側下肢も前方に出た体幹に引っ張られることになり、分回しのような運動スキルに頼らなくても、慣性の力が加わって、下肢はよりまっすぐにより力強く前方に振り出されるようになる・・・
関係する要素群(あるいは運動リソース群)が変化し、その相互作用の結果として運動パフォーマンスは改善する。この説明は、以上のように力学的な視点での説明も可能である。むしろこのような説明の方が、「麻痺が改善した」と一気に飛躍した結論に飛びつくよりは実際的ではないのか。
まあ、「運動パフォーマンスの質的・量的改善は必ずしも麻痺が治った証拠」とは言えないわけだ。
それに上のような改善は、「脳に働きかける」と大上段に構えなくても、誰でも適切な運動課題を積み重ねることによって比較的短期間に達成可能である。(詳しくは拙書「リハビリのシステム論-生活課題達成力の改善について(前・後編)」を参考にしてください)
単純な因果関係論の視点だけに頼っていると、運動変化の原因をすべて脳に還元してしまい、「脳性運動障害で運動パフォーマンスが良くなるのは麻痺が改善しているからだ」と素朴に信じてしまうのではないか。
本来、人の体をロボット、脳をコンピュータに喩えるのは変な話である。ロボットは人の動きを人工的に作ろうと、その時の技術でなんとか人の動きを真似しようとしているだけだ。決して人の運動システムを再現できているわけがない。
つまり人の運動システムと機械システムの作動は全く異なっているのに、今度はその人工的なロボットの構造と働きを基に私たち、人の運動システムの作動を説明・理解しようとしているわけだ。主客転倒も甚だしい。
いい加減、「わかりやすいから」と脳をコンピュータに喩えるようなアナロジーは捨てた方が良いのではないだろうか。人の運動システムの作動は人の運動システムの作動を見ていくことでしか理解できないはずである。(終わり)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「麻痺は治る」と主張される人へ(前編)
以前からそうなのだが、最近になってもSNS上で「脳性運動障害の麻痺は治る、治せる」という旨の「ささやき」をする人は絶えない。
たとえば「やはり麻痺は治ると信じてアプローチすることが大事なのだとつくづく実感しました」などである。まあ、あまり声高に、明確に主張しているのではなく、囁いているわけだ。
以前は「脳性運動障害による麻痺は治ります!治して見せます!」と強く主張する人にしばしば出会ったものだ。まあ、こう言われると「科学論文として是非とも発表してみてください」と言いたくなる。もし本当なら「ノーベル賞ものではないか!世界の人々が賞賛するよ!」ということではないか。
しかし大抵は、「それが科学論文として発表するのは難しい。麻痺の改善の程度を数値として表すのが難しいからだ。しかし、臨床経験として間違いなく麻痺は治っていると実感している」などと返されたものだ。
そこで「麻痺が改善しているとどうして言えるのか?」と聞くと、「ハンドリングで動きを正して、繰り返し感覚運動学習をすると、たとえば歩行時の患側下肢の振り出しが大きく、力強く、まっすぐに振り出せるようになる。運動が量的にも質的にも改善していることが実感できる。つまり健常な人の歩行に近づいている。麻痺による運動問題に対して脳が新しい運動パターンを再学習することによって筋活動が高まり、脳機能が機能的に改善した結果である」などと答えられる。
これは簡単に言うと、「下肢の振り出しのパフォーマンスが量的・質的に良くなっているので、これは原因となっている麻痺が良くなっている証拠である」と言っているわけだ。
「脳性運動障害の運動問題の原因は麻痺である。脳神経が壊れて、筋活動あるいは運動プログラムが消失するのが原因で運動パフォーマンスが落ち、独特のパターンに支配される。逆に運動パフォーマンスが改善しているのは、その原因である麻痺が部分的にでも改善した、あるいは運動プログラムが再学習されたからだ」ということだろう。
どうも極めて素朴で単純な因果の関係を想定しているらしい。この考え方は学校で習う要素還元論による因果関係論のもっとも極端な現れ方であろう。
要素還元論とは、複雑な現象は、より基本的と思われる要素に原因を還元して(戻して)説明しようという立場である。たとえば学校で習うように「歩行能力低下の一つの原因は下肢筋力の低下である」と因果の関係を想定するわけだ。
この場合、まるで人の体をロボット、脳をコンピュータに喩えて理解している。脳機能の再建とは、正しい感覚入力による運動プログラムの再入力のようなイメージで捉えられている。
ロボットの組織的な運動変化なら、その原因はほとんどコンピュータに還元できる。そしてこのロボットをお手本に人の運動変化を理解し、説明する。人の運動変化は脳が起こしているのだ、と。
つまり脳性運動障害では、運動の改善や悪化の原因は基本的な原因となる要素「脳の働き」に還元して説明する。
このような単純な構造で人の運動システムを理解していると、「脳機能の低下→運動パフォーマンスの低下」であり、逆に「運動パフォーマンスの改善→脳機能の再建」と単純に思えてくるのだろう。
だからこの考え方をする人は、ハンドリングや感覚運動学習という言葉を使って麻痺肢を操作しながら、「筋肉に働きかけているのではない!感覚入力を通して脳に働きかけているのだ」といった説明を行う。
しかし、脳機能の改善を仮定しなくても、運動パフォーマンスが質的・量的に改善するという説明は可能である。「運動パフォーマンスの改善≠脳機能の改善」というわけだ。
次回、システム論の立場からこの説明の一例を紹介しよう。(後編に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
体重変化などの指標を通して学ぶ動的システム論 その2
前回、テーレンらは「脳の成熟に伴って原始歩行が消失する」という従来からの要素還元論あるいは単純な因果関係の説明には不満であったと述べた。そして動的システム論の視点からの説明を試みたのである。
動的システム論にしろ、古典的なシステム論にしろ、その主張の最も基本の枠組みは「世の中のさまざまな現象は、それに関係する様々な要素感の相互作用によって生まれ、変化したり、安定したりする」ということである。
つまり原始歩行と呼ばれる運動も様々な要素間の相互作用によって生まれて、その状態を変化させているのではないか、と考えるわけだ。
たとえば原始歩行の消失した赤ちゃんをお湯につけると原始歩行が再び観察されることはよく知られていた。
テーレンらはこれを基に、重力や下肢重量、筋力などのいくつかの要素が影響し合っているのではないかというシステム論の視点に沿って、以下のような検証を進める。
・原始歩行消失の時期には下肢の脂肪量が増加し、下肢全体の重量が増加している。これによって下肢筋力が相対的に弱ったことになり、重力に逆らって下肢を持ち上げられなくなり、消失するのではないか。だからお湯につけると浮力によって再び下肢運動が可能になるのではないか
・原始歩行がみられる新生児の時期からトレッドミル上で歩行運動を継続すると原始歩行は消失しない。つまり筋トレをして筋力を改善・維持すれば原始歩行は消失しないと考えられる
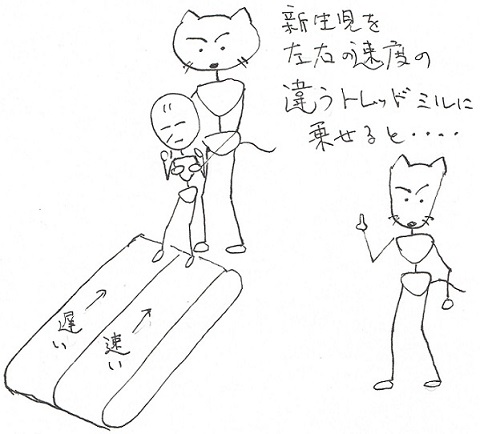
・左右のベルトの速度が異なるトレッドミル上に原始歩行のみられる新生児を乗せる。すると新生児といえども練習なくそれらの課題にうまく適応して柔軟に歩行の動きを生み出すことができた。たとえば早いベルトの上に置いた脚はゆっくり、遅いベルトの上に置いた脚は速く動かして、両方のベルトの中間速度で乱れることなく交互に脚を運ぶことができた。
つまり新生児に対して「反射」と呼ぶのは失礼なくらい、周りの状況変化に対応して協調した動きを生み出すことができたのである。「原始歩行」という名前は「新生児はより原始的存在である」という誤解あるいは偏見によるものである。
これらから示唆されることは、従来仮定されていたように、「原始歩行の消失は、脳の成熟(髄鞘化)によって抑制される」ではないということだ。
そして原始歩行と呼ばれる歩行は、実は最初から協調され、状況に応じて適応的に変化する成人の歩行の特徴を備えているということ。まあ、簡単に言えば、新生児の原始歩行は、その後にみられる成人の歩行と同じ、連続しているものと言えるわけだ。
まあ、これだけ見てもわかると思うが、要素還元論での因果関係の見方は単純で理解しやすい。しかし、まるで人の体をロボットの様に仮定しているので、とても単純な説明をしてしまう。実際、「お湯につけると再び出現する」といった現象をうまく説明できないし、偏見による誤解を生んでしまうのかもしれない。
一方、「様々な要素感の相互作用」というシステム論の視点から見直してみると、上述のように丸っきり異なった説明が生まれてくる。まあ、その分、説明にたくさんの手間がかかるのだが。
さて、くどいようだがもう一度まとめておこう。
新生児にみられる歩行はその後の歩行と連続していて、状況変化に応じて協調された動きを生み出せる。つまり新生時期からの歩行のパターンは重力や下肢重量、筋力、学習経験などの様々な要素間の相互作用によって、その現れる状態が様々に変化するのである・・・あっ、やややっ、またウォーキングや体重変化の話から逸れたままではないかっ!・・・申し訳ない、次回は戻りますから(^^;))(その3に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「歳のせい」と言う勿れ その5 第203週
さて今回は5番目の治療方略「偽解決解消治療方略」です。
⑤偽解決解消治療方略
人の運動システムは、必要な課題達成に問題が起きると、自律的に何とかその場で問題を解決して課題を達成しようとします。そこが機械と違うところです。おじいさんの古時計の針は壊れると止まったままです。元々決められた作動しかしません。もっとも1日2回は正確な時刻を指すことにはなりますけどね(^^;)
さて、たとえば足関節が硬い人が、ある日、健康のためにジョギングを始めます。体を動かすのは気持ちが良いものです。
「あー、すがすがしい!これは毎日続けよう!」と雨の日以外はジョギングを続けます。
ところがアスファルト道路は大きな傾斜ばかりでなく、微妙な起伏や傾斜があります。体を重力と大地の間で安定させるためには、この大地の大小の起伏に上手く体、特に足部を適応させる必要があります。しかし足部と足関節が硬いために柔軟に変形して大地をつかみ、適応することができません。
まあ、バランスを崩しやすくなります。足関節で数ミリの傾きでも頭の先では大きなブレになります。
この運動問題を解決して課題を達成するために、人の運動システムは、膝や股関節の過剰使用で反応するような運動スキルを発達させます。すると膝関節や股関節に過剰にストレスがかかり、痛みを発生することになります。
つまり足部の硬さでバランスがとりにくいという問題解決のために新たに生み出した膝の運動スキルが、更に新たな膝の痛みという運動問題を生み出してしまうわけです。このように新たな運動問題を生み出してしまうような問題解決を「偽(にせ)解決」とCAMRでは呼びます。
膝OAの方もそうで、最初に膝痛が起き始めたときに、「痛い脚への荷重時間を短くする」といった問題解決を図るようになります。荷重時間を短くするのはCAMRでは「不使用の問題解決」と呼ばれます。患側下肢での支持をできるだけしない、つまり使わないようにするからです。(これらについて詳しくは拙書「リハビリのコミュ力」か「脳卒中あるある」を参照ください)
確かにこの不使用の問題解決で少しは楽に歩けるようです。そして「ましな結果が得られる」のでこの運動スキルを自動的に繰り返すようになります。しかし長い距離、期間を歩けば自然に膝や他の関節への負担は大きくなり、足関節や膝関節の痛みは徐々に強まります。結果、次には過剰に杖をついてますます荷重しなくなったり、むしろ動かなくなったりという問題解決に移行していきます。
このシリーズの最初で紹介した膝痛の方の例では、実はこの不使用の問題解決が使われていました。その結果、ますます動かなくなり、患側下肢を使わなくなっていました。
元々の膝痛に加えて、偽解決の状態が加わるので状況はより複雑になるのです。
さて、「偽解決の状態を発見し、偽解決の問題解決に代わり、より適応的な運動スキルを探索・発見・改善の方針を出すのが「偽解決解消治療方略」です。様々な偽解決の状態を理解して、その解消方法を示唆します。
「不使用問題解決」の場合は、問題が起きないように少しずつ、できるだけ使って課題達成するという方針を持ちます。
たとえば不使用に対して、「多要素多部位同時治療方略」で、足関節が硬い場合は、周辺の軟部組織のリリースやモビライゼーション、更に全身の大関節の柔軟性という運動リソースを時間の限り改善します。次に「課題達成治療方略」で改善した足関節及び全身の柔軟性を利用して、「十分荷重しても痛みが起きないような歩き方を探して、繰り返す」という「課題設定」と「実施条件」を通して、患側膝を痛くないように荷重・重心移動する運動スキルを探索してもらい、繰り返し、熟練して頂くようにします。
ともかく「痛みの起きないように」という課題設定の下、痛みのない歩行のための運動スキルの探索、発見、熟練を促すようにします。意外に痛みを生み出さない工夫は沢山あるものです。どれか一つ、工夫が見つかるとそれをきっかけに解決が進みます。
これが上手く行くと、痛みを生じるような歩行スキルから痛みを生じない歩行スキルへと自然に運動スキルが切り替わります。
セラピストは、常にいろいろ考えては試行錯誤を行って、自分なりに使える方法をたくさん準備しておくと問題解決の能力が高まります。地道な努力の繰り返しですが、やはりとても大切なことです。
以上のように、CAMRでは常に五つの治療方略を同時に、適宜用いて、患者さんの運動問題を解決し、生活課題達成力を改善していきます。
五つの治療方略は最初から完全に使おうと思わなくても良いのです。意識しながら少しずつやっては見直して行くことが大事です。各治療方略についての詳しい技術やマニュアル、実施上の工夫もいずれ公開していく予定です。コロナが収まれば講習会などを通じてお知らせできると思っています。早くコロナが収束すれば良いですね(^^)
今回は「歳のせいと言う勿れ」というテーマで老化・加齢と運動問題について述べるつもりでしたが、すぐにCAMRの治療方略と治療技術の話になってしまいました(^^;)今書いている別の原稿に引きずられてしまいました(^^;)反省です。 またシリーズを変えて、老化と運動問題については述べていきたいと思います。加齢についてのシステム論の視点は、学校で習ったりするものとは異なった視点を教えてくれます。楽しみにしておいてくださいね。(終わり)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
歳のせい」と言う勿れ その4 第202週
久能ワハハン整(ととのう)です・・・・以下同文です(^^;)
今回は「課題達成治療方略」の説明です。
④課題達成治療方略
機械修理型治療方略で操作するべき運動リソースを選び、多要素多部位同時治療方略で、その場で改善できる運動リソースをドンドン改善します。つまり柔軟性や筋力、使える環境リソースなどを増やすわけですが、柔軟性や筋力、杖などの補装具類はただ増やせば良いわけではありません。
むしろ増えた運動リソースの「使い方」が問題となってきます。つまり必要な運動課題を達成したり運動問題を解決したりできなければいくら筋力などを増やしても無駄になるわけです。
この必要な運動課題を達成したり、運動問題を解決したりするための運動リソースの使い方が「運動スキル」です。
運動スキルは、実際の運動課題を達成したり、運動問題を解決したりする過程の中でしか身につきません。つまり歩くための運動スキルを発達させるためには、実際に歩いてみることでしか身につきません。(運動スキルには「転移」という現象が知られていますがここでは説明しません。詳しく知りたい人は拙書「リハビリのコミュ力」などを参照ください)
また一つの運動課題はその環境や実施条件を変化させても達成できるということが大事です。つまり運動スキルの環境・状況変化への適応性の大きさが大事になってきます。
たとえば病室内は安全に歩けるけれど屋外ではすぐ不安定になってしまうのでは、歩行スキルは異なった環境への適応力が低いことになります。そして行動がかなり制限されることになります。運動スキルにはそのような異なった環境や状況への適応性が求められるのです。
たとえ伝い歩きのレベルだとしても、手すりだけでなく、家具や壁を利用して歩くスキルを身につければ行動範囲はずっと広がってくる訳ですから。
通常、生活課題達成力は運動リソースの豊富さがベースになります。運動リソースが豊富だと運動スキルは環境や状況への適応力が高まり、より多彩に展開できるようになります。多要素多部位同時治療方略で利用可能な運動リソースをできるだけ増やそうというのはそのためです。
しかし麻痺が重くて身体リソースの改善が難しい場合は、より高機能で特殊な環境リソースを用いることで、移動や移乗などの生活課題を達成することもできます。たとえば電動車椅子がそうです。将来的には皮膚の微弱電流で操作できる電動車椅子ができるかもしれません。つまり皮膚の微弱電流を意図的に変化させる運動スキルが必要になるかもしれませんね。
CAMRでは運動リソースを増やし、それを基にした運動スキルを多彩にすることで課題達成力を改善することが一つの目標となりますので、多要素多部位同時治療方略と課題達成方略は常に中心の治療方略になります。
課題達成治療方略にはそのための計画と方針が用意されています。
たとえば片麻痺患者さんの歩行練習を初めて開始するときには、「課題を設定する」ことから始めます。患者さんの状態を見て、患者さんが少し努力すれば、あるいはセラピストが少し工夫・援助すれば達成できる課題を設定することです。
「患側下肢の支持が弱い」ならばそれを強くする課題、「患側下肢の振り出しができない」あるいは「患側下肢への重心移動ができない」ならそれができるような課題を工夫します。
運動実施はセラピストが他動的に動かしても意味がありません。運動スキルはアクティブな運動を通してのみ発見・獲得されるからです。課題はそのことも考慮して設定されます。つまり患者さんの持っている最大限のアクティブな運動能力が十分に使われるように考慮します。そしてそれらは患者さんの努力を必要とするけれど、最後は成功裏に実施されるように工夫し、援助します。
また実施しては、失敗や成功を経験してそれを積み重ね、やがて繰り返される成功体験が運動スキルとして得られるわけです。失敗ばかりでは得られないし、成功ばかりでは簡単すぎる課題設定の中で、成功のための努力の修正方法が学べません。
だからこそ患者さん自身が、課題の成功・失敗がわかるような課題設定が大事です。自ら失敗が分かり、修正ができそうなときにその方法が探れるからです。麻痺のある患者さんに「健常者の様に歩く」では失敗しか経験しません。あるいはセラピストが「今のはだいぶん健常歩行に近づいたよ」という他人の主観的な意見に失敗・成功の判断を委ねることになります。患者さんは常に霧の中を手探りで進んでいるように正しいのかどうかの判断ができないので修正が難しいのです。
むしろ「転げないでここからあそこまで歩く」のような明確な課題設定が大事です。
課題達成治療方略は、常にこの繰り返しになります。少し努力すれば成功裏に終わるだろう課題を設定して、実際にそれが成功に終わるように工夫して行きます。こうしてできるようになるに従って課題はより難しく、実施環境や条件も難しくしていきます。
このシリーズの1回目では膝痛を扱いましたが、基本となる課題は「痛みが起きないように○○で歩行する」となるのです。○○の中には「平行棒を両手で支持しながら」、「平行棒を片手で支持しながら」、「片手で杖、片手で椅子の背もたれを持って押しながら」、「片手で杖、片手で壁にもたれながら」などと様々な条件を入れることができます。
「課題設定」と「成功への実施上の工夫」がセラピストのやるべき仕事となります。たとえば「片手で杖、片手で壁にすがって歩く」と少し膝痛が出る場合、痛みが出ないようにする工夫が幾通りもありますので皆さんも少し考えてみましょう。
これがセラピストにとってもなかなか難しいことなのは言うまでもありません。このためにはセラピストの試行錯誤と努力が必要でしょう。
そして考えた内容を実施します。上手くいったらコンプリメントをするのです。
「悪い膝に体重を乗せても痛みがなくなってきましたね。上手に歩くようになられたですね!」上手く行かなかったら、もっともっと考えてみましょう!そうやって考えることと考えた内容がセラピストの財産になります。
さて次回は「偽解決解消治療方略」について説明します。(その5に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「歳のせい」と言う勿れ(その3)201週目
久能ワハハン整(ととのう)です。
日陰に入ると日差しの暑さがウソのように涼しくなります。「うん、○○○○日和だ」・・・(何のことかわからない人にはごめんなさい、漫画の真似です。特に意味ないです(^^;))
さて、前回ではまず問題解決に向けてアプローチするべき構成要素を絞り込むために①「機械修理型治療方略」を、そして自己組織化する状態を大きく変化させるために②「多要素多部位同時治療方略」を用いました。まあ、簡単に言うと「要素を絞り込んでその時その場で操作できる要素はできるだけ同時に広範囲にアプローチする」訳です。でもこれでも長い時間経過から見るとまだ一時的な状況変化しか起こせていません。好ましい状況変化を継続するためには以下の治療方略に沿って行くことが重要です。
③クライエント-セラピスト協同治療方略
「私に任せなさい!患者さんのことは私が判断して決めます!」といった感じのセラピストをたまにみます。なんだか「患者さんの治療に私が全責任を持って解決しますよ」と言っているみたいで、格好良さそうです。
でも患者さんの人生の中でセラピストが関わるなんてほんの一瞬です。セラピストも忙しいので、「独りの患者さんの責任をとる」なんてあり得ないです。ビジネスとしてできることを最大限努力するべきですね。
それに本来患者さんの運動問題を一番解決したいのは患者さん本人のはずです。その患者さん自身を運動問題の第1の解決者として治療を展開しようというのが「クライエント-セラピスト協同治療方略」です。患者さんが運動問題解決に継続的に努力することを促し、セラピストはあくまでもその補助の役割を果たすための方略になります。
つまり患者さん自身が自らの運動問題の解決者になることが大事です。セラピストが起こせる状況変化は一時的ですが、患者さんはその気になればずっとその状況を継続できます。これが一番望ましい状態ではないでしょうか。
さて、クライエント-セラピスト協同治療方略の目標を達成するための様々な具体的な技術があります。
たとえば患者さんが中心の運動問題解決者でセラピストは補助の役割と言っても、まずはセラピストが患者さんから協力者として信頼される必要があります。「このセラピストは私に寄り添って助けてくれている」と思って頂けないとこの治療方略は成功しません。
そのための技術の一つがコンプリメントです。
コンプリメントとは「労(ねぎら)うこと、ほめること」です。
「なあんだ」と思われるかもしれません。しかしセラピストの中には、「患者は自分の言うことを聞くのが当たり前」と思っている人もいます。セラピストから言われた課題を一生懸命に頑張ってやっても素知らぬ顔をしたりして、「はい、では次にこれやって!」などと指示しています。労働者をこき使う自己本位な社長みたいです(^^;)患者さんは極端に言うと自分が機械や奴隷のように扱われていると感じてしまいます。これではセラピストとの信頼関係などできるはずがありません。
だから課題ができたら「上手くやりましたね!」と視線を合わせて言いましょう。そして失敗しても「難しいのに良く頑張ったですね!」と労います。いつでもできるだけほめてあげます。これだけで関係は変わってきます。
また、「リフレイミング」の技術もよく使います。先の膝痛の例では、「膝痛は歳のせいではなく、運動不足のせい」と問題の枠組みを置き換えました。「年齢という解決不能の問題ではなく解決可能な問題である」と運動問題の意味を変えたのです。
でもこれも口先だけでは上手く行きません。この時に一緒に使ったのは徒手的療法でした。徒手的療法は上手く行けば痛みや硬い動きの状況を一瞬で変化させ、セラピストに対する信頼関係を作ります。痛みを一瞬で変化させるわけですから、セラピストの言うことにも説得力が出てきます。
上手く行かなくても患者さんは「特別なことをしてくれている、自分のために努力している」と思われたりするものです。
CAMRでは徒手的療法は運動リソースを改善するための良い方法であると同時に、セラピストとクライエントの関係性を築く上でも良い手段と考えています。だからセラピストは柔軟性や痛みを改善するためのいくつかの手技を身につけておくことを勧めています。
更に「成功の物語」と呼ぶ技術もあります。まず患者さん自身が何をしたら問題が解決するかという具体的方法を示します。次にその患者さんが継続して努力できるようにセラピストと患者さんが話し合いながら具体的な中身を患者さんの意見を中心に決めたりします。
更にこの問題解決が上手く行くと「こんな状態になるよ」と示してあげることもあります。たとえば先の膝痛の例では、「また元気な時のように行きたいところに行けるようになりますよ」などです。
もう一つは「例外探し」。
「いつも痛い」と言われる患者さんに「痛みのない時」を尋ねます。そうすると「両手を支えに使っていると痛みがない」などの例外がわかってきます。患者さんにとってはどうしようもない痛みではなく、なんとかなるものだと気づかせますし、セラピストにとっても課題設定や達成するべき状態を理解する助けになります。
CAMRではこれらの技術を「足場作りの技術」としてまとめています。足場とは家を建てたり修理したりするときに、一時的に家の外に組むものですね。家そのものではありませんが、家を作るために必須です。そして安全に、速く、確実に家を建てるのに役立ちます。
CAMRの足場作りの技術も治療そのものではありませんが、治療効果を上げて患者さんが意欲的に問題解決に取り組むことに役立ちます。(「足場作り」の技術については拙書「リハビリのコミュ力」に説明があります。ご参照ください)
最初は大変そうに見えますが、これらは技術です。つまり誰もが使って慣れていくことで上達します。練習をすれば必ず慣れて使いこなせるようになります。
クライエント-セラピスト協同治療方略は、障害そのものに対する治療ではありませんが治療を効果的に行う上で非常に重要なのです。
CAMRでは、この方略を常に進めながら、「多要素多部位同時治療方略」と「課題達成治療方略」、「偽解決解消治療方略」などを同時に実施していくことになります。
CAMRでは基本、常に「五つの治療方略を同時に進めていく」ことがポイントになります。 次回は課題達成治療方略の説明です。(その4に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「歳のせい」と言う勿れ その2 200週目
久能ワハハン整(ととのう)です。
今夜は秋の虫たちの声が賑やかになってきました。「うん、○○○○日和だ」です。(何のことかわからない人にはごめんなさい。漫画の真似ですが、特に意味はないです(^^;))
前回の膝痛のアプローチですが、今回はもう少し掘り下げて説明します。
CAMRでは以下の五つの治療方略を用います。
①機械修理型治療方略
②多要素多部位同時治療方略
③クライエント-セラピスト協同治療方略
④課題達成治療方略
⑤偽解決解消治療方略
今回はこれらについて説明します。
①機械修理型治療方略
これは皆さんが学校で習う治療方略です。人の運動システムを構造で理解し、壊れた部品を直すように、人の体の構成要素の悪い部分を治そうとします。まあ、たとえば特定した部位の筋力とか柔軟性を改善するわけです。
もちろんこれは整形疾患分野では非常に優れた治療方略ですし、他の疾患でも関係する運動リソースを特定して改善するときには非常に役立ちます。
一方、システム論を基にしたアプローチは運動リソースや身体部位を特定する視点がありません。つまり「○○が原因だ」という因果の視点がないのです。
代わりにシステム論で行うのが「どんな状況?」という視点です。
「問題が生まれる状況があり、それはどんな状況か?」と考えます。そして「問題が生まれる状況を変化させて問題を解決する」わけです。
ただ「状況を変化させる」というのはとてもあやふやです。
「その1」の膝痛の場合、状況を変化させる方法は「その1」に挙げた以外に無数存在します。以下のように・・・・
1. ○○社のサプリメントを飲んでみる
2. 好きな音楽を聴きながらそのリズムに合わせて歩いてみる
3. ダイエットを行うために食事時間や食事量を変化させる
4. 靴を替えてみる
5. マシントレーニングを行ってみる、エトセトラ、エトセトラ・・・・などとこれまでの運動・歩行・生活状況を変える方法は無限に存在します。それらは効果があるかも知れませんが、ないかもしれません。あるいは悪化させるかもしれません。ともかく無限のやり方があるので、試行錯誤もやたらとたくさん必要になります。
一方で、機械修理型治療方略は痛みに関する構成要素をある程度絞り込むことができます。そして絞り込んだ構成要素(CAMRでは運動リソースと呼びます)、それらをできるだけ一度に変化させて全体の状況変化をより大きく効率的に起こすことができます。
この方法が、多要素多部位同時治療方略という訳です。
②多要素多部位同時治療方略
徒手的療法では膝痛の原因として軟部組織や関節内運動などに原因を特定してそれにアプローチします。結果、膝痛は改善します。しかししばらくすると痛みが再発することはよくあることです。
つまり痛みを生じることに大きく関係する一要素あるいは少数の要素を改善させても、他の要素が変化しなければ、たくさんの要素間の相互作用によって改善した要素も元通りの痛みを生じる状態に引き戻されてしまいます。
これはシステムの「自己組織化」という性質として知られています。多要素から構成されるシステムでは、それらの相互作用の結果、落ち着くべきところに落ち着くという性質を持っています。ちょうど水を山の上から流すと、流れやすいところに集まって大きな流れを作り、やがては落ち着くべきくぼみを見つけてそこに溜まります。
運動システムにも落ち着くべき状態が幾つかあるのですが、その中から一番安定する状態に落ち着いてきます。膝痛の継続する患者さんでは、膝痛という状態に一番落ちつき易いのです。つまり膝痛の状態に自己組織化しているのです。
たとえば膝痛を訴える患者さんの軟部組織の短縮や癒着がみられます。そこでその部位の筋膜リリースだけを行うとそれで痛みが軽減します。そして一時的に痛みのない状態に落ち着きました。しかし、しばらくするとまた元の膝痛の状態に自己組織化してしまうのです。痛みのない状態より、痛みのある状態が一番落ち着きやすくなっているからです。
だから落ち着きやすい状態、つまり歩いても膝痛が起きない状態に自己組織化するように全体の状況を変化させる必要があります。
そのためにまずやることはその場で変化させられる運動リソースを同時にたくさん変化させてみることです。それが多要素多部位同時治療方略です。
まず柔軟性や筋力はセラピストがその場で操作可能です。筋膜リリースやストレッチ、関節のモビライゼーションなどのテクニックを多部位、つまり足趾や足関節から体幹、肩、頸部まで多部位に実施し、改善します。筋力も足趾から体幹・頸部まで含む全身運動で多様に使ってもらい、活性化します。
こうして身体の多要素多部位をその場で同時に変化させて痛みを生み出す状況を大きく変化させます。しかしこの状況変化さえ、長い時間経過の中では一時的です。もっと継続的に変化させるためには、生活・職場環境や日常生活習慣も変えていく必要があります。
そのためには以下の残りの三つの治療方略も必要になります。
③クライエント-セラピスト協同治療方略
④課題達成治療方略
⑤偽解決解消治療方略
次回はこれらについて説明します。(その3に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「歳のせい」と言う勿れ(その1)199週目
久能ワハハン整(ととのう)です。今朝はお盆明けの涼しさが感じられて、「うん、○○○○日和だ」です。
さて、僕がデイケアで働いていた頃には、近所のお年寄りがたくさん来ていました。「膝が痛い」という人が多くて、しかも「お医者さんから『歳のせいだからしょうがないよ』と言われてショックだった」と悲しげに、あるいは諦め気味に話す人が多かったです。
また医師も膝の痛みを治す手段を持っていないと、「歳のせい」と言って患者さんに諦めてもらうのが楽なのかもしれませんね。
実際、「歳のせい」と言ってしまうと諦めるしかないです。「はあー、そりゃ仕方ないわね-、がはは・・」などと豪快に笑い飛ばすおばあちゃんもおられましたが・・・まあ、普通「諦めの言葉」であることに間違いはないです。
確かに歳をとると、構造的には多かれ少なかれ劣化するのでしょう。しかし、それだけで痛みが出るわけでもありません。それでセラピストまで「歳のせい」なんて言って諦めてしまったらおしまいです。
さて、ではそういった場合の僕の対応は以下の通り。
①「ちょっと脚、見せてもらっていいですか?」と視診(変形、浮腫の程度など)→触診(周辺軟部組織の硬さと膝・足関節の可動域など)と進みます。(後々良くなってくると痛みが軽くなるだけでなく、浮腫が減り、可動域も良くなります。ちゃんと見ておきましょう)
②「フムフム、少しさすってみましょう」などと言って大腿・下腿の内外前後面のリリースや膝関節のモビライゼーションを行います。時間があれば、足部のストレッチとモビライゼーションも行います。更に時間があれば体幹の回旋や股関節などのストレッチも行います。あるいはやってもらいます。実際、これだけで痛みが軽くなる人も結構いますが、まあ、効果は一時的です。あるいは新しい痛みが出る人もいるので次に進みます。
③平行棒を持って立って頂き、「痛みが出ないように爪先立ちや足踏みを軽くします」と言って荷重や重心移動練習を行います。大体3-5課題を実施します。うまくいってもいかなくても「良く頑張ったですねー」と労います。そして「今日はここまでで、少し様子を見てみましょう。何か変化があったら教えてくださると嬉しいです」とセッションを終了します。絶対に「どうです?軽くなったでしょう」などと期待を込めた表情で誘導するようなことがあってはなりませんね、ハアー、これはちょっと恥ずかしい振る舞いです。
④その日のうちに比較的多くの方が、何らかの改善を自発的に言われることが多いです。「あれ、痛みがなくなった(軽くなった)」、「どうしたんか?よう(よく)動くわ」など。次回のセッションで言われることもあります。「あの後しばらく痛みが軽かった」など。この手の反応が出れば更に次に進みます。
⑤「お医者さんは歳のせいと言われたかもしれませんが、多くの場合、『歳のせい』と言うよりは、座って過ごす時間が長くなって関節の動きが悪くなったり、あまり歩かなくなって筋力が弱ったりして痛みが出ることが多いんです。要するに運動不足です。
それにマッサージで良くなっても一時的な改善です。
もしこのまま、本当に痛みなく残りの人生を健康に過ごしたいなら、そして本当に楽しく歩き続けたいならここで膝に良い運動を指導しますので続けましょう!そしてお家でも少しずつやってみてください!続けることで膝が良くなります」などと誘います。
そして下肢体幹の支持や重心移動、振り出しの運動課題の強度を少しずつ上げながら、長期的に筋力と柔軟性を改善・維持することと、家庭でのホームワークを提案します。
⑥その結果、自発的に運動を続ける人もいるし、更なる運動を求める方もいるし、中には「マッサージだけは続けてくれ」という人もいます。まあ、性格などによってそれぞれの解決状態に落ち着かれるのです。
ここで使われるテクニックは、
①徒手的療法を中心とした痛みや柔軟性、張力改善の一般的に習うテクニック群。
これはCAMRでは「多要素多部位同時治療方略」(MEPSメップス)の中で用いられるテクニックとなります。
②「痛みが出ないような歩き方を探ってみましょう」という課題を提案して、立位での歩行に近い荷重、重心移動、振り出しを含む様々な運動課題を試行錯誤します。また様々の状況変化を加えながら実施します。
これはCAMRでは「課題達成治療方略」(TATSタッツ)の中で用いられるテクニックです。
③「『歳のせい』ではなく、生活習慣や運動習慣による痛みなので、ちゃんと運動すれば残りの人生、元気に過ごせますよ」という「因果の説明」や「リフレイミング」。
これはCAMRでは「クライエント-セラピスト協同治療方略」(CTC)で用いられる足場作りのテクニックです。もちろん上手くいかない場合もあります。その場合はより異なった形の状況変化を起こすなどの個別の対応が必要です。
そうです!くれぐれも「歳のせい」と言う勿れ!(その2に続く・・・か?)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!













