人の運動の特徴を聞かれたら・・・(その1)
私たち理学療法士・作業療法士は人の運動の専門家であるらしい。それならば「人の運動の特徴は何か?」と問われれば、それなりに専門家らしく答えられるはずである。
それに人の運動システムの特徴を知っていれば、訓練を行う上でもより効果的に実施できるはずである。
さあ、あなたならなんと答えますか? とは言え、漠然とした問いなので答えにくいかもしれない。少し考えてみよう。まず私たちは人の運動や運動システムについて、学校ではどんな風に習っただろうか? 運動システムとは皮膚に囲まれた体である。そしてその体には力を生み出す筋肉や力に支えと方向を与える骨・関節があり、身体や周りの状態を知るための感覚器官があり、周囲と身体の状況を判断し、周囲の状況に適応的に体を動かすための指令を出す神経系、その他諸々があるのだと習う。
つまり人の運動システムとは、体の構造や各器官の機能から理解することになる。
さあ、以上の学校で習ったことを基に「人の運動システムの特徴は何か?」と考えてみよう。
うーん、人の運動システムは、多様な機能の集合体であるということは分かる。だが、これだけでは人間らしい運動システムの特徴はわからないというかパッとしない。
構造と機能だけ見ると、なんだかロボットを見る視点と変わらないのではないか。
まあ、「構造と機能」の視点というのは、基本、「もの作り」の視点だろう。水の構造がわかれば酸素と水素から水を作り出すことができる。そして人の運動システムの構造と各機能を知ることで、人に模したロボットを作り出すこともできる訳だ。
たとえば力を生み出すモーター、力に支持と方向を与える躯体と可動部分の構造、環境を知り運動をコントロールするための様々なセンサーとコンピュータなどを組み合わせて、機能を再現するわけだ。構造と機能という視点は、「ものを作り出す」という人間らしい行為を支える視点ではある。
それに西洋医学の根本に流れるのは、「人や動物は自然や神が生み出した機械である」という機械論と呼ばれる思想である。だから人の体を機械とみなして人の体を構造と機能で理解することは当たり前とも言える。まあ、それなりにメリットも多い。西洋医学はこれによって進歩してきたわけだ。
しかし人間が作った機械を基に人の運動システムを理解しようとするヘンテコな現象も見られる。たとえば脳をコンピュータに例えて理解しようとする。「運動経験を通じて感覚入力が脳に届き、これで脳内には運動プログラムが作られる」などという「プログラム説」なるものが存在する。
なんだか呆れた話である。自分たちが作り出した「もの」をモデルに、自分たちを理解しようというわけだ。どう考えても作り出した「もの」は現時点で可能な技術で縛られているのに、その縛られた技術で作り出した「もの」が自分たちを理解するモデルとなりうるのか?
どうも構造と機能の視点で見ると、機械のように人を理解することになり、結局セラピストは機械の技術者とか整備士のようなイメージになるのではないか。確かに解剖などに詳しくなってそれを基にロボットの様に動きを説明するセラピストも多い。
しかしそれでは私たちが普段知っている人の運動システムの特徴は無視されてしまうようだ。人の運動システムは機械のように単純でわかりやすい作動をしているわけではない。
次回から別の視点で、人の運動システムの特徴を探ってみよう(その2に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!



電子書籍を読んでみましょう!
電子書籍とは、紙ではなくデータで提供される本のことです。
電子書籍というと「インターネットに繋がっていないと読めないので不便」と思われる方もいると思いますが、実際にはお持ちの携帯電話などにダウンロードして、いつでもどこでも気軽に本が読めるようになります。
電車に乗っているときや隙間時間などにも手軽に片手で読むことができます。ゲームや音楽を楽しむように、読書も気軽に楽しむことができるのです。
少しでも読書量が増えると、視野が広がって人生は意外に豊かになります。「知っているつもりのことも実は全然知らなかったんだ!」と気づかされることも多いです(^^)
特に気軽に始めるならアマゾンの提供するKindleがお勧めです。やり方は以下の通り。
①まずは無料の電子書籍リーダーを携帯にダウンロードします。https://www.amazon.co.jp/b?ie=UTF8&node=3211799051
②そしてアマゾンのアカウントでサインインします。(アマゾン・アカウントを持っていない場合は、アマゾンでメールアドレスとパスワードでアカウントを作ることができます)
③電子書籍リーダーの中でお気に入りの本を探して、購入手続きに進みます。
④購入した本はダウンロードされ、リーダーの中に表示されます。
⑤文字のサイズなども変えられます。読みやすくして読書を楽しみましょう!
Kindleには「ペーパーホワイト」という専用端末もあります。安いものは五千円以下で買えます。片手で持てて、バッテリーの保ちも良く、数千冊の本をこれ一台に保存できます。目にも優しいですよ。僕のお勧めです(^^)
また電子書籍は紙の本に比べて価格の安いものが多いのも魅力です。
ちなみにKindleにはPT・OT向きに書かれた本もたくさんあります。
たとえば「システム論を基に、人の運動システムの作動の特徴」について書かれた本です。人の運動システムの作動の特徴を知っていれば、それを基に訓練を進めることもできますもんね。すいません、つまりは筆者の書籍の宣伝です^^;))以下の通り。
・システム論の話をしましょう!(税込み100円)
・治療法略について考える(税込み100円)
・正しさ幻想をぶっ飛ばせ!-運動と状況性(税込み100円)
・正しい歩き方?/俺のウォーキング(税込み100円)
・リハビリの限界?/セラピストは何をする人?(税込み100円)
・脳卒中片麻痺の運動システムにダイブせよ!-CAMR誕生の秘密(税込み100円)
・脳卒中あるある!-CAMRの流儀(税込み300円)
・リハビリのシステム論(前編):生活課題達成力の改善について(税込み400円)
・リハビリのシステム論(後編):生活課題達成力の改善について(税込み600円)
以上の本は、CAMRのホームページやブログからも購入画面に進めます^^;
・CAMRのホームページ:http://rehacamr.sakura.ne.jp/index.html
さあ、気軽に読書を楽しみましょう!(^^)/
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
プロのセラピストとは?(後編)
実際に麻痺は治せないわけだが、麻痺のある方から「健常者のように歩きたい」と言われて「いや、麻痺は治せません」と言えないセラピストもいるようだ。どうも同化主義というよりも、「ノー」と言うことが怖いようだ。
「ノー」と言うことで、自分がやっているリハビリという仕事の限界を認めることになる。自分の人生の意味でもあるリハビリの仕事の価値を下げ、否定してしまうようで怖いのかもしれない。
それに「ええ、麻痺を治しましょう!」と応えれば患者さんも喜ぶし、自分もプライドを傷つけないので安易にそうしてしまいがちなのか?
またもう一つのタイプのセラピストもいる。
「諦めずにもっと、もっと頑張れば、もっと健常者の歩き方に近づくよ」とゴールの見えない目標を安易に掲げてしまう。
「いや、諦めたらダメだ。努力をすればいつか夢は叶う」という達成不可能な目標を掲げ、「努力を続けること自体に価値がある」と主張する人達はユートピアンと呼ばれる。まあ、それは夢をちらつかせて生きる目標を与えているのかもしれないが、仕事として運動問題の解決の依頼を受けるプロとしてはどうなのだろう?
これでは患者さんの運動問題をずっと解決することなく、長引かせてしまうことになる。
つまりこの場合も「ノー」と言わない。
成熟したプロの仕事、たとえば弁護士などでは、できないことは「できない」とはっきりと言う。その代わり、実現可能なその他の選択肢をいくつか提案する。そしてクライエントに選択・決定してもらう。クライエントも自分の最初の要求は通らなくても、自ら代替案を選択・決定したのだから満足できるという訳だ。
リハビリだって「リハビリでは麻痺は治せません。でもその代わり、今の少しぎこちない分回し歩行をより滑らかにして、より速く、より楽に、より安全に歩けるようにすることはできます。どうでしょうか?」とか「日常生活の環境を少し工夫して、より楽に生活できるようになります。どうでしょう?」などと患者さんに選択肢を提出、判断、決断してもらうことができる。
つまり自らの仕事の限界を認めないと、次の一歩に踏み出せないだろう。
患者さんだって「麻痺は治らない」と納得し、次の達成可能な目標に向かうことで新しい人生に向かうことができるかもしれない。
この場合、客観的な評価が重要だ。たとえば10メートル歩行で、速度、歩行率、歩行比のデータを表で示し、患者さんにも提示すると良いだろう。すると患者さん自身で訓練後の効果を判断されるようになる。客観的でわかりやすいデータでプラトーに達したことを、セラピストではなく患者さんご自身が判断できるようになるからだ。
自分自身で結果を予期し、実際の結果と比べてもらうオートエスティマティクスのような評価法※を実施するのも良い。
そうすることで結局、患者さんの障害の受け入れと新しい人生に向き合うことを納得するまでの期間を短くすることにもなるだろう。
そして客観的な評価結果を患者さんと共有することで、患者さんも「一人の自立した人間である」と伝えることになる。患者さんが自身で判断できないように見えるのは、必要で正確な情報を持っていないからだ。患者さんが自身で理解できる客観的なデータを提供できないようでは、フェアな仕事とは言えない。
セラピストが情報を独り占めして、偉そうに評価しているだけではダメなのである。
そして患者さんが手に入れた情報を基に自分自身で将来の決断を下すことが、人生でどれだけ大きな意味や価値を持つかを考えてほしい。セラピストがもう一つの選択肢を提供することにもなるだろう。
実現不可能な夢を与えるだけでは専門家とは言えない。運動問題の「専門家」とは、自分の仕事の限界を受け入れ、その上でどうするかという専門的意見をいくつも提案でき、患者さん自身に判断してもらえるようわかりやすい情報を提供するもののことではないか。(終わり)
※オートエスティマティクスについての文献
1) 田上幸生他: 片麻痺患者はいつ頃から思い通りに動けるようになるのだろうか?─オートエスティマティクス(Auto-estimatics)を用いた調査報告. Vol.39 Suppl. No.2 (第47回日本理学療法学術大会 抄録集), 2012.
2) 西尾幸敏: Auto-estimaticsの臨床での有用性について. 上田法研究会会誌 Vol.10 No.3, 1999.
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
プロのセラピストとは?(前編)
「代償運動って悪い?」のシリーズは前回で終えたのだが、その後以下のような「分回し歩行」に関する質問をいただいた。
このシリーズで「分回し歩行」は、「探索利用スキル」に分類され、偽解決の状態にはなりにくい優れた問題解決スキルであると結論した。
するとある人からこんなことを言われた。「患者さん本人がみっともない歩き方だから嫌だと言われた。だから患者さんの希望に沿ってできるだけ修正するべきではないか」
これは一見正しそうに思える。
しかし人は誰もみんな違っているものではないか。障害があれば健常者と違っていて当たり前である。この「人と違って当たり前」ということを、むしろ社会全体として受け入れていくことが大事なのではないか。
しかし患者さんの「この歩き方が嫌だ」という言い分を聞いて、一緒になって「そうだね、その歩き方は良くない。健常者の様に効率よく、美しく歩こう!」などと言って健常者の立場からの「同化主義」に陥っていないか?
たとえば分回し歩行をしている患者さんは、必ず最大限効率的に動いているわけではない。全身、特に体幹と股関節の柔軟性を改善し、健側を中心に筋力が改善されると、分回し歩行はよりスムースにより速く、より安定して歩けるようになる。これは当然のことだ。柔軟性や筋力などの運動リソースが豊富になると、それを利用して歩く分回しという運動スキルによるパフォーマンスも改善してくるのが当たり前だ。
しかしこの改善の場面でこんなことを言うセラピストがいる。
「ずいぶん健常者の歩行に近づきましたよ!頑張りましたね!」
これでは障害を拒否しているのではないか。障害者の動きから健常者の動きに近づいたから良いと評価しているわけだ。これぞまさしく健常者からの同化主義ではないか。
患者さんは麻痺のある体で努力して分回し歩行という問題解決スキルを生み出したのだ。その分回し歩行を拒否、否定して健常者の動きに近づくことに価値ありと言っている。これではいつまで経っても違いを認め合う社会にはならないだろう。
本来先頭に立って多様性を認め合う社会に向かう原動力となるはずのセラピスト自らが、障害を拒否・否定して健常者の動きだけに価値を認めているのだから。
そうではなくて、麻痺のある体で努力して様々な可能性を探索して、何とか見つけ出された分回しという運動スキルを素直に認めるべきではないか。麻痺のある体は健常者とは異なったやり方が必要だと認めるべきではないか。
患者さん自身が健常者と同じ動きをしたいと望まれるのは仕方ない。その気持ちを否定する必要はないだろう。それは患者さんの問題だ。
しかし客観的に見て麻痺が治せないのにも関わらず、セラピストが「患者さんは健常者と同じ動きを目指すべきだ」と考えるのはどうしたっておかしい。職業として、プロとして患者さんの運動問題を解決するべきなのに、麻痺が治る見通しもないのに夢だけを語って、患者さんの問題を長引かせているのではないか。 いや、同化主義とかそんなことまでは言わなくても、麻痺を治してくれと言われて「ノーと言えない」セラピストもいるようだ。これについては次回で検討しよう。(後編へ続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「代償運動」って本当に悪い?(最終回)
さて、ここまでで「代償運動」という言葉は人の運動システムの作動を表すには相応しくないということを述べてきた。代わりに「問題解決スキル」という言葉を使えば、人の運動システムの作動の特徴をよく理解できる。
しかし問題解決スキルとは言っても急場しのぎの問題解決となって、新たな問題が生じる偽解決に陥ることもある。
いったん偽解決の状態に陥ると、患者さん一人でその状態から抜け出すことはできないので、セラピストはまず偽解決の状態を変化させる必要がある。常に偽解決の状態を評価しながら、それを修正しなければならない。
同時にセラピストは他の運動リソースも改善し、その利用方法である運動スキルの多様化のための日常生活課題の目標と手段の計画を立てて、患者さんの生活課題達成力を改善しなくてはならない、というのがここまでのまとめである。
さて、CAMRでは患者さんの問題解決スキルは以下の6種類に分類される。
①探索利用スキル
②外骨格系問題解決
③不使用の問題解決
④骨靱帯性問題解決
⑤健康時の問題解決
⑥安心確保の問題解決
今シリーズでは、そのうち②外骨格系問題解決と③不使用の問題解決の二つを紹介したが、ここではもう一つ、探索利用スキルを紹介したい。臨床あるいは日常で一番多く出会うものだ。
探索利用スキルは健常者・障害者にかかわらず誰もが一般的によく行っている問題解決スキルだ。人は運動課題達成に何か問題があると、利用可能な運動リソースを身体の内外に探索し、課題達成のためにその運動リソース利用のための運動スキルを生み出す。
子どもが棚の上のお菓子に手が届かないときは、周りを見渡して漫画雑誌を見つけ、数冊積んで踏み台にして上がり、手を伸ばしてお菓子を取ったりするのはまさにこの「探索利用スキル」である。両手でごちそうの載ったお盆を抱えたまま「あ、電灯のスイッチを消し忘れた」と思うが、壁に近づき頭や顎でスイッチを押して消すのもそうである。
壁のスイッチは通常指先で押すが、肘や頭でも押せる。指先や肘や頭などの運動リソースは様々なものに置き換えが可能である。この同じ課題達成に様々な運動リソースが置き換え可能であるということが、人の運動システムの状況適応性を生み出している。そしてこれを可能にしているのが、課題達成のために運動リソースを探索・利用するための運動スキルを無限に生み出す人の「課題達成能力」である。
これまで説明しなかったが、「分回し歩行」もこの探索利用スキルである。麻痺側下肢が動かなくなったので、身体の内部に利用可能な運動リソース(健側下肢や体幹の筋力などの身体リソース)を探し、それを利用して患側下肢を生み出す分回しの運動スキルが生まれたのである。更に杖という環境リソースを利用して、健側への重心移動をより安定して大きくすると、麻痺は重くてもより大きく患側下肢を前方へ振り出すことが可能になる。
どうでしょう?分回し歩行を「代償運動」と呼んでしまうと、「悪い運動、修正するべき運動」と思うものの麻痺は治せず、患者さんもセラピストも苦しんでしまう。でも「問題解決スキル」と呼ぶと、人の運動能力の素晴らしさに感謝したくなるのではあるまいか!(終わり)
(問題解決スキルの全貌は「リハビリのシステム論-生活課題達成力の改善(前・後編)」西尾幸敏を参考にしてほしい)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「代償運動」って本当に悪い?(その6)
前回までで「代償運動」よりは「問題解決スキル」という言葉の方が相応しいこと。そして同じ外骨格系問題解決のスキルでも、ヘルニアでは適切な問題解決スキルであるが、逆に脳性運動障害では外骨格系問題解決のスキルが継続的に繰り返される中で、硬さを強めてやがて偽解決の状態になることを説明した。
先に述べたように、セラピストの役割の一つは、偽解決に陥った状態を改善することである。本来運動システムが自律的に問題解決を図るのだが、それによってかえって新たな問題を生み出してより悪い状態となるのが偽解決である。この状態に陥るとなかなか患者さん一人でここから抜け出すのは難しい。
脳性運動障害後の外骨格系問題解決は偽解決の状態になりやすい。身体が硬くなりすぎる、つまり柔軟性が低下して運動範囲や重心の移動範囲が小さくなる。動くために硬くしたのに、かえって動きにくくなるわけだ。更に硬くなりすぎて将来的に変形になって増悪したり、痛みになったりして患者さんを苦しめる。
多くの脳性運動障害の患者さんでは、この偽解決の状態が全身的あるいは部分的に見られるのが普通だ。
この外骨格系問題解決の偽解決状態に有効なのは、上田法というHands-on therapy(徒手的療法)である。
上田法は脳性運動障害後の身体の硬さを緩和して柔軟性を改善し、運動や呼吸状態を改善する徒手的療法である。短期間の講習で誰でも実施できるため、家庭内での健康増進や生活状態改善を目的とするプライマリ・ケアの分野でも注目され始めている。
もちろん上田法の効果は一時的なものである。しかし柔らかくなっている間に自発的で多様な運動を行うことで、この柔軟性は維持されることがわかっている。上田法を実施して動きやすい状態にして、広がった運動範囲の中でできる運動課題を多様に行うことで、硬さによる支持性と運動性のバランスを維持することができる。
つまりセラピストの本来の役割は、患者さんの柔軟性を始め、様々な運動リソースを改善し、その改善した運動リソースを使った生活課題達成のための多様な運動リソースを患者さん自身で探索・試行錯誤して、日常生活課題の達成力を改善することを助けることである。
この生活課題達成力改善のために具体的な目標や運動課題などのプログラムが必要だが、この過程は患者さんや家族だけでは障害の全貌が掴めず、具体的な目標や手段の計画を立てにくいので、セラピストが力を発揮するところである。
具体的な目標と手段が明確になれば、患者さんは日々の訓練の中で自分の変化した身体の事を良く知るようになり、成功体験を繰り返していくことに集中できるようになる。結果、効率的に生活課題達成力を改善することができる訳だ。
外骨格系問題解決の偽解決の状態がある場合は、まず上田法などで偽解決の状態を改善しては、様々で適切な運動課題を繰り返して頂いて、生活課題達成力を改善することが私たちセラピストの中心的な仕事と言って良いだろう。(最終回に続く)
【お詫びと修正】
『「代償運動」って本当に悪い?(その5)』(2023年3月21日投稿)に掲載した文章に誤りがありました。以下の部分です。
「そして脊椎動物の横紋筋でも同様の蛋白群の存在やその現象が確認されている。(最後に資料紹介)」
紹介された論文には「脊椎動物の横紋筋でも同様の蛋白群の存在」が言われています。しかし「その現象」、つまり脊椎動物での現象は全く説明されていません。現象についてはDietzやBergerらの論文に間接的な証拠と思われるものがあるだけです。
この部分は修正いたしました。
申し訳ないです。自分の思い込みから思わず筆が滑ったものです。以後このようなことのないように気をつけます。西尾幸敏2023年3月28日
※この文章のオリジナルは、CAMRのフェースブック・ページの2023年3月28日に投稿されたものです。
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「代償運動」って本当に悪い?(その5)
ここまでの流れ。
障害や運動問題によって新たに生じる運動は「代償運動」ではなく、本来「問題解決スキル」と呼ぶ方が正しい、と説明してきた。しかし運動システムのとる自律的問題解決にも「偽解決」が混じってくる。セラピストの役割は有効な問題解決と偽解決を見分け、偽解決の修正を図ることが重要、というところまで進んだ。
偽解決かどうかを見分けるためには、単純に見た目の運動の形に囚われるのではなく、総合的に様々な視点から患者さん自身にとってどのような新たな不利益があるかを考えていく必要がある。
たとえば片麻痺患者さんの分回し歩行を見てみよう。半身に麻痺があり、患側下肢を振り出すことができない。だから歩くためには非麻痺側の半身を使って分回しをする必要がある。
しかしそれに伴って新たな痛みや障害が発生することがあるだろうか?僕の経験ではあまりないように思う。つまり偽解決ではなく、半身麻痺のある体で上手く歩くための問題解決としてうまく成り立っているスキルである。
一方で脳性運動障害後に見られる身体の硬さは、CAMRでは「外骨格系問題解決」と呼ばれる問題解決スキルだが、しばしば偽解決が見られる。
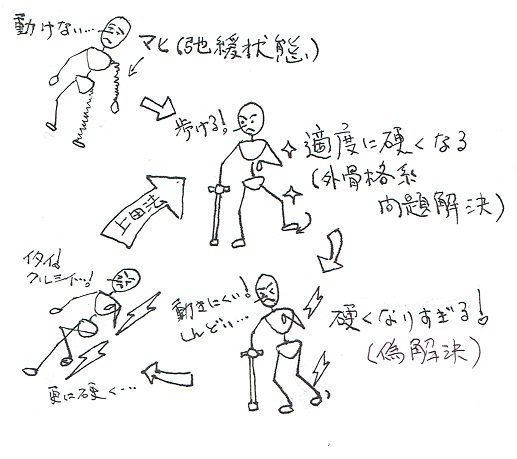
たとえば片麻痺発症直後は、麻痺側の上下肢・体幹に弛緩性麻痺が見られる。弛緩性麻痺とは筋の収縮が得られないため、麻痺部の手脚は弛緩して水の入った袋のようになってしまう。重力に押しつけられて安定するまで広がろうとする。 このままでは動けないので運動システムは自律的な問題解決を図る。
つまり弛緩部分をシステム内の様々なリソースを利用して硬くしようとする。 たとえば伸張反射を亢進する。またキャッチ収縮のメカニズムを繰り返し作動させて弛緩部分を硬くしていく。キャッチ収縮は二枚貝の平滑筋でよく研究されている。一連の蛋白群の働きによって、エネルギー消費や電気活動なく筋の収縮状態を維持できる。そして脊椎動物の横紋筋でも同様の蛋白群の存在が確認されている。(最後に資料紹介)
硬くなれば荷重も可能になるし、1つの塊として引きずってでも動けるようになる。結果として身体を硬くすれば動くことが少しでも可能になるので、ドンドン硬くなる問題解決を繰り返すようになる。
しかしこれらは元々状況に応じて調整可能なメカニズムではない。抑制のメカニズムがないので繰り返され、ドンドン硬くなって柔軟性を失う。全身の運動範囲や重心移動範囲は小さくなって、かえって動きにくくなる。更に硬くなると変形が進み、固定化され、血流が悪くなり痛みや苦しみを生み出すという偽解決の状態を生み出すわけだ。
この外骨格系問題解決という問題解決スキルは、実は健常者の日常生活でもよく見られる。腰部ヘルニアで腰痛が出たときなどは、脊柱を側彎させてヘルニア部の圧迫を避けた状態で体幹を硬くする。
この場合、痛みが軽くなると自然に硬さは取れて元の柔軟性を取り戻す。ヘルニアのような整形疾患では上手く問題解決スキルとして機能しているわけだ。
だが脳性運動障害では麻痺は広範囲で継続する。従って外骨格系問題解決のスキルはずっと継続し、繰り返される。その結果として硬くなりすぎる。脳性運動障害では外骨格系問題解決スキルは偽解決の状態を生み出しやすい。
更にこの外骨格系問題解決が強くなると分回し歩行の動きを制限する。こうなると「分回し歩行は努力性の歩行でこのために体が硬くなる」などと2つの異なった現象が1つにまとめられて誤解されたりもする。困ったものである。問題をより複雑にするわけだ。
この硬くなりすぎるという偽解決の状態は、上田法などのHands-on therapy(徒手的療法)によって解決状態に導くことができるのだが、この詳しい内容はまた次回のココロなのだ!(その6に続く)
【キャッチ収縮に関する文献】盛田フミ: 貝はいかにして殻を閉じ続けるか?-省エネ筋収縮”キャッチ”の制御と分子機構. タンパク質 核酸 酵素 Vol33 No8, 1988.
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「代償運動」って本当に悪い?(その4)
これまでのまとめ。「代償運動」は「本来の正しい運動ではないので修正するべき」というイメージである。基本的に悪い運動であると考えてしまう。それでは運動システムの作動が目標としているものを表していない。
そうではなく障害後に生じる運動は、「運動システムが課題達成のために自律的に問題解決をするための運動スキル」である。だから『問題解決スキル』」という言葉で置き換えて使ったらどうかと提案した。
そうすると「人の運動システムって、機械と違って運動問題が起きて必要な課題達成が困難になると、自律的に問題解決を図って何とか課題達成しようとするんだな!機械とは違うんだな!」ということが自然に理解できるようになるはずだ。「ああ、やっぱり人の運動システムって素晴らしい!」と感じるのではないか。
ただしこれだけでは上手く説明できないところもある。このシリーズで最初に挙げたような、「足部・足関節が硬くて膝がバランスをとるために過剰に働いて膝が痛む」場合だ。確かに「膝がバランスをとるために働く」部分は問題解決になっているのだが、それが「過剰に働く」によって「膝の痛み」という新たな問題を生み出している。
CAMRでは、このような「新たな問題を生み出す」問題解決のことを「偽(にせ)解決」と呼ぶ。偽解決はもともと家族療法などの心理療法で使われる言葉で、私たちの身の回りにも溢れている現象である。
たとえば圧迫骨折のおじいちゃんは「痛うて動けん。痛いのが治ったら動くわい」という問題解決を図って痛みが消えるまで寝て過ごそうとするが、いつのまにか廃用という問題が生じて動けなくなってしまう。
学校でイジメの問題が起きると、先生がみんなに厳重に注意する、あるいはみんなを叱る。そうすると「イジメの潜在化」という新しい問題を生み出す。
政治家は「内容についてはこれから様々の議論を尽くす」とその場しのぎに答えるが(特定の政治家のことではありません(^^;))、結局解決を先送りにし、手遅れになってより困難な問題を生み出す。
つまり一見問題解決には見えるのだが、新たな問題を生み出して、より問題を複雑、あるいは悪化させ、解決をより困難にするようなものが「偽解決」と呼ばれるわけだ。
人の運動システムが自律的に行う問題解決にももちろん「偽解決」が混じっている。というのも運動システムの自律的問題解決は、筋力などの運動リソースが失われた中で、あり合わせのものを使って何とか問題解決を試みている。必ずしも上手く行かないことも多いのである。
そうするとセラピストの重要な役割の一つは、患者さんの運動システムが自律的に生み出した問題解決スキルが、適切な問題解決の状態を生み出しているかあるいは偽解決なのかをまず見分けることである。そしてそれが解決可能なものかを見分けることが重要である。
通常は運動問題が生じたその後で、行為者の運動システムが自律的に選択した解決策なので修正可能なことも多い。そうすると上手く偽解決の状態を、問題解決の状態に近づけることができるわけだ。 詳しくは次回に。(その5に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「代償運動」って本当に悪い?(その3)
セラピストが「代償運動」という言葉を問題として指摘するとき・・・・セラピストがその問題を解決できる時はなんの問題もない。しかし問題解決できない時には、問題だけを指摘するだけである。つまり「代償運動」は患者さんを苦しめるは「悪魔のささやき」となるかもしれない。
たとえば片麻痺患者さんは苦労して分回し歩行というスキルによって漸く歩けるようになったのに、「その歩き方は良くない。間違っている」などとセラピストから指摘される。そしてセラピストの治療なるものに従うもののいつまで経っても麻痺は治らず、分回し自体が消えることはないからだ。
患者さんは頑張っても健常者の様に歩けないので、努力が足りないと自分を責めたりする。反省的なセラピストは自分の力が足りないと自分を責めたりもする。そうでもないセラピストは「患者の努力が足りない」とか「私の言うことを聞かないからだ」と患者さんやその家族を責めたりする・・・・やれやれ、随分こんな場面を見てきた。
この問題を解決するには、まず悪い運動を意味する「代償運動」という言葉を使わないことだ。代わりにCAMRでは、障害などの後に現れる運動の多くは、「自律的問題解決の運動スキル」と呼んでいる。これは長いので普通、「問題解決スキル」と略す。
なぜなら人の運動システムでは、麻痺や痛みなどの運動問題によって必要な生活課題が達成できなくなると、自律的・自動的に何とか問題を解決して必要な課題を達成しようとする本質的な性質が備わっているからだ。
つまり前々回見たような「足関節が硬い」場合は自律的に「膝でバランスをとる問題解決スキル」を生み出す。また「片麻痺がある」場合は、「分回しという問題解決スキル」を生み出して、歩くという課題を達成している。
麻痺や可動域低下などの運動問題を自律的に解決して、課題を達成するための運動スキルであるので、本来的に悪い運動ではない。これは人の運動システムが自然に備えている課題達成のための能力なのである。
たとえば右膝を打撲して荷重すると痛い。そうすると右脚に荷重しないで移動する様々な問題解決スキルが生まれる。左脚のケンケンや右脚への荷重時間が短い跛行などのスキルも見られる。また左脚はすり足で振り出して右脚の負担を小さくして痛みを軽くするかもしれない。あるいは右下肢荷重時には両手で家具や手すりを持って痛みを生じないように移動するかもしれない。いずれも右膝の痛みを軽くして移動するための問題解決スキルである。
上記の場合、いずれの問題解決スキルも荷重に右脚をできるだけ「使わない」ようにする意図があるので、CAMRでは「不使用の問題解決」と分類される。 腰痛ヘルニアで激痛がある場合、体を硬く棒のようにして痛みを小さくするように歩かれる。これは体全体を硬くするため「外骨格系問題解決」と分類される。 このようにCAMRでは全部で6個の問題解決スキルが分類されている(詳しくは「リハビリのシステム論-生活課題達成力の改善(前・後編)」西尾幸敏を参考にしてください)
つまりこれまで「代償運動」と呼ばれていた運動は、「問題解決スキル」と呼んだらどうか。本来的に問題解決をしようとしているので「分回し歩行」は悪い運動ではない。努力の結晶である。患者さんもセラピストもそう評価したらどうか。
ただし、問題解決スキルは全てが良い結果になるわけではない。それらの問題解決は、応急的なその場しのぎであって、そのために新たな問題を生み出すこともある。その新たな問題を生み出すような問題解決スキルは「偽(にせ)解決」と呼ばれる。 次回はこの「偽解決」について検討しよう!(その4に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
「代償運動」って本当に悪い?(その2)
今回のシリーズでは普段臨床で何気なく使っている「代償運動」について様々な角度から検討している。
前回は「代償運動」の定義や「歩行時の膝痛の原因の一つが、足関節の硬さのために大地の起伏を十分に吸収できないために膝関節に過剰な代償運動が起きること」というアイデアを紹介した。
前回は「代償運動」という言葉を使うことで、因果の関係も上手く説明できて「やはり修正するべき運動」と考えられる。
「何だ、それで良いではないか」と言われそうだが、どうもことはそんなに単純ではない。問題は「代償運動」=「好ましくない運動であり、修正するべきである」という単純な思い込みである。
たとえば脳卒中後の分回しの原因は、脳の細胞が壊れたことで麻痺が起こり、患側下肢を振り出せなくなることである。仕方なく健側下肢や体幹を使って健側へ大きく重心移動して患側下肢を浮かせ、更に体幹を振り回すことによって患側下肢を振り出して歩行をする訳だ。
セラピストの多くは、分回し歩行は「本来の歩行方法ではなく代わりの歩行方法、つまり代償運動である」と思うのかもしれない。
実際に僕の周りにも「分回し歩行は代償運動なので治したい」というセラピストが少なからずいた。なぜなら「本来の運動とは『健常者の歩行方法』であり、それから大きくずれているから」などと言う。
しかし麻痺のある体でも、麻痺のない健常者の歩行の形が「本来の歩行方法」なのだろうか?それはやはりおかしい。半身に麻痺がある体では、分回し歩行こそ、本来の歩き方ではないのか?
脳性運動障害では運動障害の原因は麻痺である。麻痺を治すことができるなら問題ないが、我が国でもこの「麻痺を治す」というアプローチが導入されて半世紀以上が経つが、未だに「麻痺が治る」と証明する科学的報告はなされていない。これは実現不可能な目標なのだろう。
つまり「麻痺があっても効率的で美しい健常者の歩き方を目指すべきである」という健常者への同化主義(努力して健常者に近づくべき、など)が背景にあるのかもしれない。
このような同化主義に支配されていると、「それは人本来の効率的な歩き方ではない。健常者の歩き方が本来の歩き方だ」と問題は指摘する。が、その問題の原因である麻痺を解決する方法はない。麻痺は治せないからだ。つまり解決手段もないのに「代償運動」だと問題だけを指摘するのはいかがなものか。
「代償運動」という言葉は、「本来の運動ができないので代わりの運動」という意味がある。そうすると「本来の運動」をどう捉えるかで、「代償運動」の意味が変わってくる。本来の運動を健常者の歩行の形に求めたのでは、麻痺のある人はどうしようもないではないか。
前回の膝痛の例では足関節の可動域を改善できたので「代償運動」というアイデアは上手く機能した。しかし、もし足関節が強直などで可動域を改善できなかった場合はどうなるのだろう?やはり代償運動と問題は指摘しても解決はできないのではないか。
代償運動と問題を指摘して、その原因が上手く解決できる場合は良いものの、上手く解決できない場合にも、「代償運動だ!」と問題を指摘するが、解決できないので患者さんは苦しめられているのではないのか? 患者さんは麻痺のある体で何とか苦労して「分回し」というスキルを発見し、麻痺肢の振り出しの問題を解決して歩けるようになった。しかしセラピストから「それは代償運動だから良くない」と批判されたのではたまったものではない。
これが「代償運動」という言葉の問題である。治せる場合も治せない場合もひっくるめて「代償運動」と一括りにして悪者扱いしてしまうわけだ。 ではどうするか?(その3に続く)
【CAMRの最新刊】
西尾 幸敏 著「リハビリのシステム論(前編): 生活課題達成力の改善について」
西尾 幸敏 著「リハビリのシステム論(後編): 生活課題達成力の改善について」
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!













