臨床問題解決能力アップへの近道☆CAMR関連情報ランキング!
CAMR基本テキストリハビリのコミュ力

すぐに役立つ知識を学ぶ!
人の運動システムの特徴に基づくアプローチで、すぐに使えるベテランの臨床知を簡単に学べます!
詳細はこちら
CAMR公式 Facebookページ

最新のCAMR情報を更新!
講習会のご案内や、CAMR研究会からのメッセージなど、CAMRの最新情報が最速で得られます!
詳細はこちら
CAMR公式 ホームページ
CAMRのすべてがわかる!
基本概念から活動記録まで、CAMRをもっと知りたい方へ。関連論文やエッセイも多数掲載しています!
詳細はこちら
≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「ADLは介護問題! その2」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
ADLは介護問題! その2 2014/1/27
~問題が問題でなくなる、変わらないけど変わる~
秋山です。反響があるととても嬉しいです(^_^)
さて、ご家族共に夜間の尿失禁"問題"に悩まされていたAさんが笑顔で在宅復帰された裏では何が起こったのか?
リハスタッフが困っているその時、介護スタッフは運動機能とは別の視点で考えてみました。まず、Aさんの排泄パターンを詳しく調べてみました。そして「おしっこが出ても漏れないようにできるのではないか」と思い、工夫の結果、「夜間排尿はあるけれど、朝パットを取り換えればよい」という状況になりました。
Aさんは、「失敗をして衣類や布団を汚し、介護者に迷惑をかける」という悩みから解放されました。ご家族は、大変だった介護(夜中起きる、たくさんの洗濯)が続けていけるもの(朝の着替えでパットを交換)に変わり、「これならやっていける」と安心しました。イライラも減り、Aさんもご家族もストレスが減りました。
「えっ?期待させて、答えはそんなこと?」とがっかりされましたか?「そんなことは知ってるよ」という声も聞こえてきそう(^^;)
今シリーズでCAMR研究会が伝えたいことは、「夜間の尿失禁に対する効果的な対策」というハウツーではありません。そういうのは私よりもっと詳しくて上手な方がたくさんいらっしゃいますので・・・。
この事例から考えたいのは次のことです。在宅ではADLは家庭の問題であり、「介護問題」といえます。ご本人側だけではどうにもならないことにどうアプローチするのか。施設という場で、異なる状況の在宅での介護問題に対してどうアプローチするか。「在宅生活問題」への関わり方なのです。
*次回その3予告 悪循環を小さく切るには・・・
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!



スポーツから学ぶ運動システム(その2)
前回はゴルフとテニスなどを例に、人の運動システムは「同じ運動を正確に繰り返すことができない」という特徴があると説明した。今回はどうして同じ運動を繰り返せないのかを考えてみよう。
ベルンシュタインはまずその理由の一つを、「人の体が粘性や弾性の性質を持っているからだ」としている。たとえるならゴムのような性質を持っているわけだ。僕なりにこれを機械と比較しながら説明してみよう。
機械はがっしりと安定した金属などでできた躯体が基礎となる。自動車なら非常に頑丈なシャーシが土台となる。車のシャーシは通常走行なら、つまり事故でも起こさない限りほとんど歪んだりはしない。つまりこの頑丈な躯体を全体の基礎として可動部分だけが安定して正確に動くという構造である。
一方人の体にはそのような頑丈で全体の安定的な構造を形作るような基礎は存在しない。まず人の体はたくさんの骨が柔軟性のない靱帯によって結びつけられた骨格がある。骨同士はある部分はタイトに、ある部分は大きな可動性を持って結びつけられている。 これを筋肉という柔軟性のある器官で包み込んでいくわけだ。筋肉は張力、つまり引く力しか生み出さないので、引く力だけで骨格の形を保ち、支持と安定性、そして運動を生み出す仕組みである。
そして状況や運動課題によって、作動する筋群はどんどん変化し、支持する部分と可動する部位もまたどんどん役割を交代し、変化していく。同じ部位が状況によって支持したり、可動したりするわけだ。機械と違って作動ははるかに複雑なのだ。
また柔軟な筋肉で形を成す構造であるから、力の発生によっても外力によっても、その形は全体に常に歪んでしまう。歪んでしまうと言うと聞こえが悪いが、しなやかに柔軟に形を変えながら動いているのである。機械では歪むのは可動部分だけで、基礎となる躯体はまったく変化しないわけだが、人では全身が常に柔軟に変形しているわけだ。
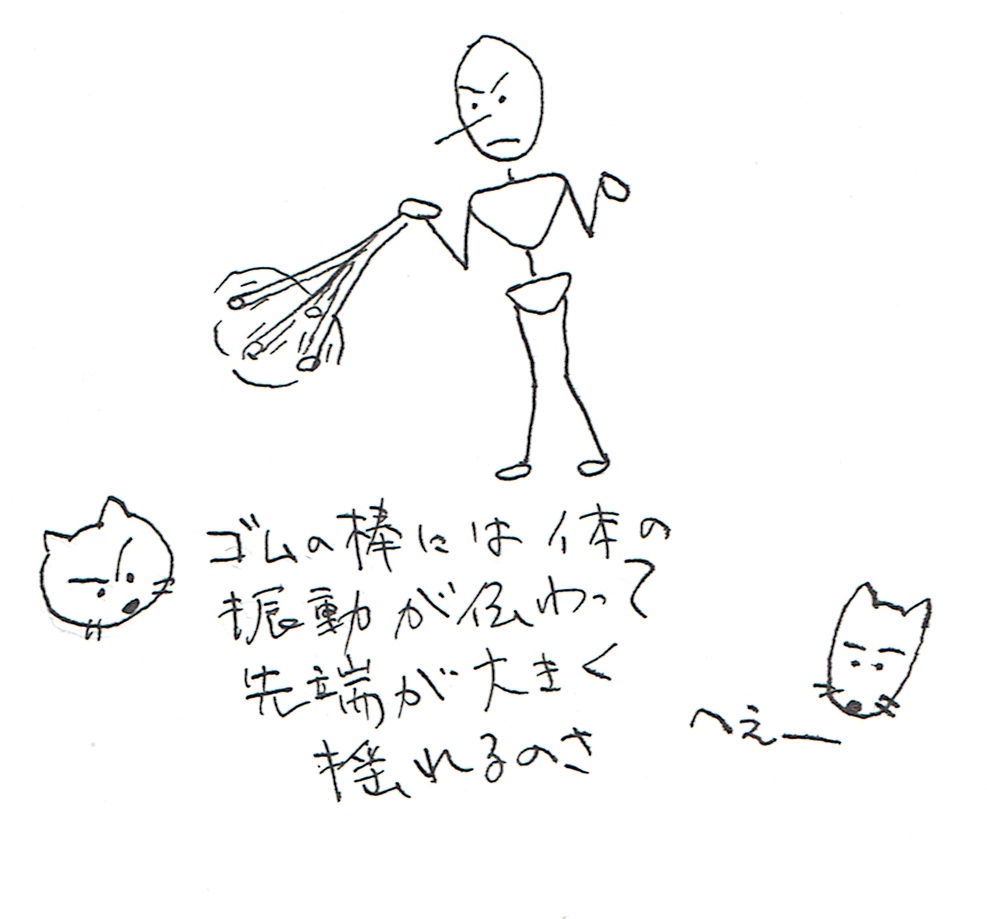
まあ、人の運動システムは機械と違って柔軟であるというのがまず第1のポイントである。たとえば長さ1メートルの柔らかいゴムの棒で、壁の電灯のスイッチから離れてを押すところを想像してみると容易に理解できるだろう。ゴムの棒では持っているだけで先端が常にユラユラ揺れて押そうとしても毎回開始位置は違うし、異なった運動軌道を描いてしまう。
実際には人の柔らかい体は呼吸などによって常に揺れて振動しており、その目に見えない小さな振動はゴムの棒に伝わると、1メートル先では大きな揺れになってしまうのである。
まあ、柔らかい構造は同一の運動を正確に繰り返すことはできないのである。(その3に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「ADLは「介護問題」! その1」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
ADLは「介護問題」! その1 2014/1/26
~"ありがち"ではすまない切実な問題~
秋山です。新シリーズです。
「母は夜いつもおしっこの失敗があるんです。その度に起こされて私まで寝不足だし、いつも洗濯物の山・・・」
入所中のAさんのご家族の嘆きです。Aさんは軽い介助で移動ができ、在宅復帰を検討中です。Aさんも家に帰りたい、ご家族もできれば連れて帰ってやりたいと思っておられますが、夜間の排泄が大きな「問題」となっています。
Aさん「自分では何ともできないの。家族に迷惑かけてしまって申し訳ない」でも自分ではコントロールできないことなので、失禁してしまいます。その後始末のため、家族も起きて寝不足、朝は洗濯物の山です。ご家族も頑張られますが、疲れてきてついイライラ。Aさんは小さくなってしまいます。
またこうなってしまうの?家族の切実な心配事です。
当施設に限らず、よくある場面ですね。さて、あなたならどうしますか?
「機能的にはポータブルトイレ自立のはずです。Aさんが夜間にも使えるようにしっかりリハビリしましょう!」
一見とてもいいアイデアです。実際にこの方法で解決することもあります。でも、そうならないからみなさん困ってるんですよね。
Aさんは立ち上がりなど上手くなってこられたのですが、移乗は見守りから変化なし・・・。
運動機能は改善が見られました。でもADLには変化がなく生活問題は変わりません。
当施設のリハビリスタッフ「ポータブルトイレを使う練習をこのまま続けても・・・。それに夜間一人では心配・・・」困った、困った。
でも、何ということでしょう、Aさんは笑顔で、ご家族も喜んで家に帰られました。切実な問題はどうなったのでしょうか?
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
スポーツから学ぶ運動システム(その1)
毎日オリンピック競技のテレビ放送を見ている。アスリート達はその時その場でできる最大限のパフォーマンスを生み出そうと必死だ。もちろん上手くいく場合もあるし、失敗する場合もある。上手く最高のプレーを生み出したときに、そして失敗したとしても必死に挑戦するその姿に感動するし、力をもらえるのだろう。
さて、オリンピック競技を一度にいろいろと見ていると人の運動システムの特徴に気がついてくる。今回のシリーズでは、それを足がかりに人の運動システムの特徴について考え、私達リハビリの臨床に役立つように検討してみたいと思う。
1.人は同じ運動を繰り返せない
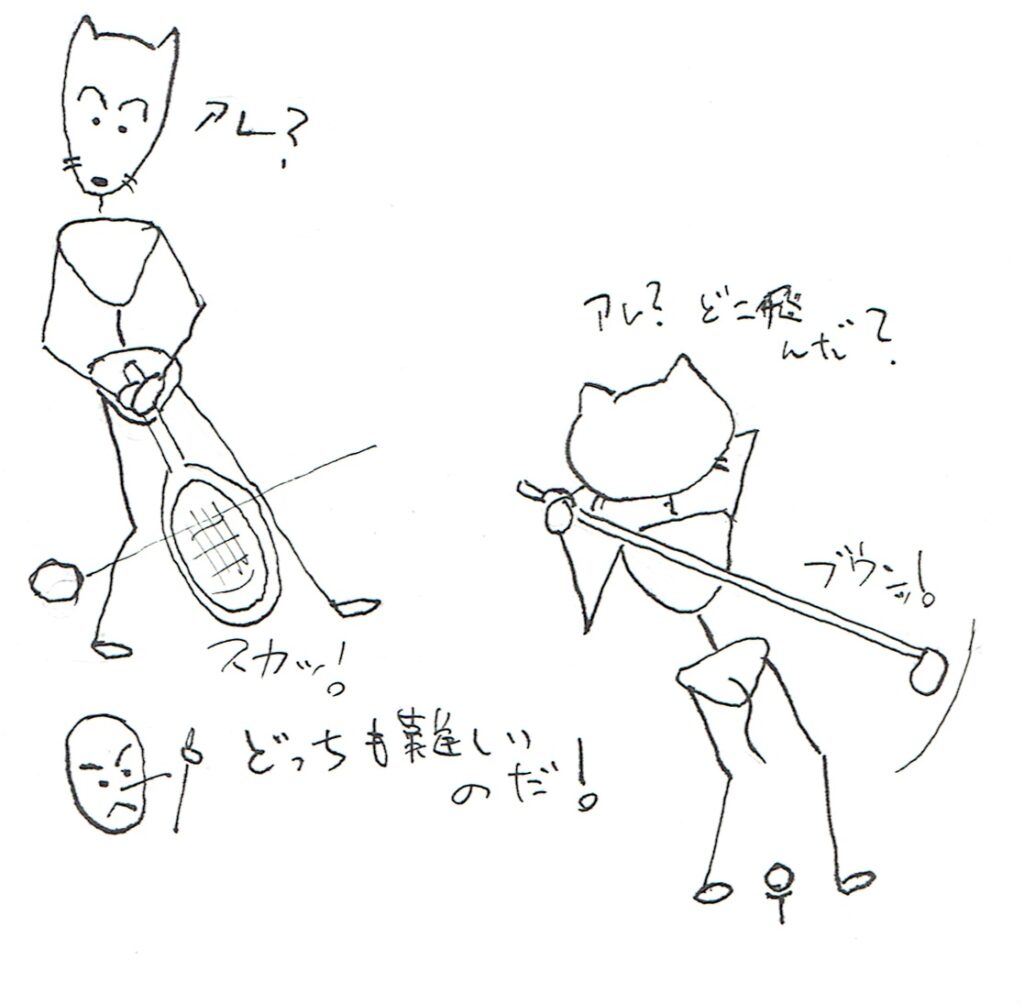
以前から書いていることだが、不思議に思うのはゴルフとテニスである。自分の好きなところにボールを置いて、自分の好きなタイミングで慣れたクラブで打つゴルフが、一球一球速度もコースも高低も球種も異なる球を動きながら打つテニスと同様に難しいのはなぜか?
あるいはバスケットボールで、全速力で走りながら敵の厳しいディフェンスをかわして打つシュートと自分の好きなタイミングで自由に打てるフリースローが同様に難しいのはなぜか?
これは人の運動システムの基本的な特徴ゆえに起こる不思議である。
その基本的特徴が何かというと「人の運動システムは同じ運動を正確に繰り返すことができない」ということだ。つまり人の運動システムはテニスのように変化する状況の中で適応的に身体を変化させ適切な課題を達成できるにもかかわらず、ゴルフのような単一の課題(置いたボールを叩く)のような同じ課題を正確に繰り返すことが難しいのである。思ったところに少しでも近づけるようにプロのゴルファーは気の遠くなるほどのたくさんの練習を、アメリカのNBAのプロバスケットボールの選手はコートに立つまでに通常100万回以上のフリースローの練習を繰り返しているのである。
この特徴に一番最初に気づいたのはロシアの運動生理学者のベルンシュタインだろう。彼は労働者の技能について研究をしていた。職人さんがハンマーで釘の頭を正確に叩く様子を運動分析装置で見てみると、毎回異なった軌跡で開始位置や叩く速度も微妙に異なっていることに気がついたのである。この微妙な運動のズレはプロゴルファーのスイングやバスケットボール選手のフォームにも見られる。
通常私達は職人さんの動きを見ると、「正確に同じ運動を繰り返している」と考えてしまう。「技を何度も繰り返すことによって、頭の中にプログラムができて、それによって正確に運動を繰り返して、同じ結果を出している」と考えるわけだ。
しかしこれはロボットのように人の運動システムの作動を考えてしまう結果だ。機械は同じ運動を繰り返すことが得意である。機械では、硬い安定した躯体と可動部分を厳密に制限して必要以外の動き(ブレ)をなくすことで同じ運動を繰り返し、同じ結果を生み出している。
だからもし人の腕を模した機械の腕で、中枢の関節の動きが1ミリ以下でもずれれば、先端の動きの誤差は遙かに大きくなってしまう。しかし職人さんの腕全体の動きは常に様々な要素でズレているのだから、釘の頭をハンマーで捉えることは常に失敗してしまうかというとそうでもない。
つまり「人は同じ運動を繰り返すのができない」ので、職人さんやアスリートは「毎回異なった運動で正確に同じ結果を生み出している」ということになる。これは不思議なことである。これがどのように行われているかを知ることは私達にとっては非常に有益だろう。次回からこれを考えてみたい。(その2に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「CAMR超入門 よく目にする光景(その6:最終回)」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
CAMR超入門 よく目にする光景(その6:最終回)2014/2/7
人の運動は状況に応じて変化します。たとえば家の中を歩くときあなたはリラックスして歩きます。しかし急に停電になって部屋が真っ暗になるとあなたは身体を硬くし、足や手で回りを探りながら歩きます。氷の上ではおそるおそる足を進め、向かい風に向かって身体を前のめりにして歩きます。狭い場所では横向きになって通り過ぎます・・・
つまり人は状況が変わってもなんとか「歩行」という機能を維持しようとします。
一方オモチャのロボットは平らなテーブルの上では歩いているように見えますが、ちょっとしたこと、たとえば十円玉を踏んで倒れたりします。そして先ほどまで歩いていたと思われる運動を正確に繰り返します。
結局人の運動システムは、状況に応じて形を変えてでも、必要な機能を自律的に維持するという性質を持っています。逆にオモチャのロボットは、機能を維持するのではなく特定の運動の形を維持するシステムです。同じように「歩いている」といってもシステムはまったくの別物です。
だから歩行訓練のために「形を憶えてその形を再現する」などという訓練目標はもともと人の運動システムには向いていないのです。歩行の特定の形の再現を求めることは、人の運動システムをオモチャのロボットのように考えているからです。
「状況変化に応じて形を変えてでも機能を維持できる」ことを訓練の目標にしなくてはいけません。そのために何をするべきか、何ができるかを考える必要があるのです。そしてCAMRはこの文脈から生まれたアプローチです。
システム論を知るということで世界観が変わりました。システムを形や構造ではなく機能で見ることでCAMRは生まれてきました。(これらのアイデアについては上田法ジャーナルに掲載したエッセイをHPに載せています)
唐突ですが、CAMR超入門はこれで最後です。最初の方から何が「超」でなにが「入門」なのか良く考えずに書いていたので、最後まで「超」でも「入門」でもなかったですね。申し訳ない。ここまで付き合ってくださった皆様、ありがとうございました。
文責:西尾幸敏
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!














