スポーツから学ぶ運動システム(その11)
「課題特定的」というのは、たとえば新奇の課題に対しても、達成のための新しい機能を自ら生み出していくということを意味している。
何がそれを可能にしているのだろうか? 一つは柔軟で豊富な運動リソースである。運動リソースは身体リソース(身体そのものや身体の持っている筋力、柔軟性、持久力などの性質)と環境リソース(環境内の物理的存在、その性質、動物や他の人など)からなっている。
人類は生まれて以来、ずっとこの環境の中で生きてきた。環境と人の体は一体になって様々な課題をこなし、生き抜いてきたのである。
学校では人の運動システムは皮膚に囲まれた体だけに限定されるが、システム論では人の体は真空中で運動しているのではなく、この環境内で運動していて、環境と一体であると考える。つまり人の運動システムはその時、その場の環境と体が課題を達成するために一体化したものと捉える訳だ。
そして人の身体は元々柔軟で様々な動きを行うことが可能である。更にこの地上を移動するための十分な筋力や体力を持っている。この豊富な身体リソースに加えて、環境内の様々なリソースを運動システムの一部として課題達成のための機能を生み出すためにつかうことができるのである。
さらに人は自ら道具というそれまで存在しなかった環境リソースを創り出すことができる。石を割って刃物を作ったし、現在では皮膚の微弱電流で移動する装置もできてきている。つまり環境リソースを無限に増やし続けることができる。新奇な課題に対しても、必要な環境リソースを準備して達成するための新しい機能を備えることができる訳だ。
もう一つは課題を達成するための運動リソースの利用方法である運動スキルを生み出す能力である。たとえば僕達はロープに様々な意味や価値を見いだすことができる。縛ったり、ぶら下げたり、固定したり、燃やしたり、染みさせたり、叩いたり、擦ったり、結んだりと様々な使い方を思いつける。
生態心理学者のギブソンはこれをアフォーダンスと呼んだ。この環境内のものや自分の身体、身体の性質の意味や価値を見いだす能力が、それを利用し、自分に必要な課題を達成に導く能力にもなるわけだ。
CAMRでは、運動リソースは「運動システムが課題達成のために利用できる資源」であり、運動スキルとは「必要な課題のために利用可能なリソースを見つけ、工夫し、達成する能力」と定義している。
つまり人は豊富な運動リソースを持ち、この豊富な運動リソースを利用して、多彩な課題達成方法を生み出す運動スキルの能力を持っているために、新奇な課題でも新たな道具を作ったり、新しい機能を生み出して課題を達成することができるのである。
だからCAMRでの基本となる訓練方針は「運動リソースを少しでも豊富にし、運動スキルを今より多彩にする」なのである。(その12に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!



スポーツから学ぶ運動システム(その10)
3.新しく生まれる競技や運動課題
今回のオリンピックではスケートボードやサーフィン、スポーツクライミングなどの新しい競技が目を惹いた。以前からの体操や新体操などでもそうなのだが、それまで想像もできない動きが現れたり、ボールがまるで身体の一部のように振る舞ったりする。これまで見たことのない体の使い方だったり、環境との関わり方である。つまり人類は常に無限に新しい体の使い方や運動課題の達成方法を生み出し続けていることになる。
CAMRでは、これが可能なのは「課題特定的」という人の運動システムの持っている性質によっていると考えている。
これは機械の運動システム、特にロボットと比べてみるとよくわかる。少し前にアシモというロボットが現れて世界を驚かせた。それまでのロボットは平らな床面でしか歩けなかった。少しのデコボコで簡単に転倒してしまうのである。しかしアシモは小さなデコボコに合わせて歩行を調整し、転倒しないで歩くし、障害物を避け、階段の上り下りもこなす。しかも階段昇降中に失敗して転落したりするところもやや人間っぽい(^^;) 僕も少なからず感動したものだ。「まるで人が入っているようだ」と思った。いよいよSFの世界が現実のものになるのかと期待したものだ。
しかしそのうちに飽きてしまった。新しいお披露目があるとできることは増えているのだが、いかにも「これならできそうだ」的なものが新たに加わっている。たとえば「ダンスをする」などである。確かに重力と床面との間でバランスを調整する機能をいくぶんか持っているので、そのリソースを利用してダンスでの重心移動などもできるのだろう。そしていかにも「そのためのプログラムだけが新たに加わったな」という感じである。つまりアシモに何かさせようとしたら、アシモにできそうなことを考えてその達成のための機能を新たに加えるのである。
つまり「決められた大きさのデコボコを歩いて、平面を走って、ボールを蹴る」ことを実現するなら、そのための最低限の機能で組み立てるのである。つまり最低限実現したいことの機能のかたまりがアシモである。そのバランス調整機能を使ってダンスもできるが、「野菜を切って」とか「スキーをして」などと言ってもできないのである。実現できる機能は、元々持っているリソースで可能なものに限られているので、プログラミングもしようがないのである。
そういった意味で、アシモを始めとするロボットは、「機能特定的」である。その存在が、作り手の計画する「できること」の最低限必要な機能だけで組み立てられているため、アシモ自ら新たな運動スキルを生み出したり、想定外の課題を達成するすることはできないのである。できる運動というのは、最初から持っている機能によって特定されているのである。
ところが人の運動システムは、機能特定的ではなく、「課題特定的」なのである。新しい課題が提示されると、その達成のために新しい運動機能を自ら生み出していくのである。(その11に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
スポーツから学ぶ運動システム(その9)
一方野球の打撃を見てみると、運動はシンプルでもその状況はより多様であり、変動性も高い競技である。
物理的環境だけを見ても、温度や明るさ、風力や風向もいつも異なっていて一試合の中でも変化することは珍しくない。打席に立っているとほこりが舞い、虫がまとわりつく。強烈に太陽が射したと思うと雲が影を落とす。小雨交じりの雨が降ると思えば強風を伴って大粒の雨が降る・・・・
打者はバットという道具を操作する。打者は両足、あるいは片脚で安定した姿勢を作り、ボールを待つ。打撃を運動課題としてみると、「来た球を打つ」に比べて「来た球の芯を的確に捉えて打つ」となると格段に難しい運動課題になる。 さらにそのボールたるや投手が打たれまいとして、毎回、球速や回転、内外高低のコースや球種を変えて投げ込んでくるので、一球毎に異なっているのである。一瞬一瞬にどうするべきかという選択肢がとても多いのである。裏を掻いたり掻かれたりと、相手バッテリーと打者との心理戦がある。
野手も毎回異なった場所に守っていて、守備範囲の広さや守備技能の巧拙もあり、風に流されることもあり、どこにどのように飛ぶかで安打になるかどうかが変わってくる。地面の凹凸で不規則に撥ねて、ボテボテのあたりが内野安打になることもある。かなり偶然任せのところもある競技なのである。まあ、ここが面白いところでもあるが。
特に草野球レベルではひどいヤジもある。相手の身体的特徴を面白おかしくからかう輩がいる。草野球では「ヤジ大魔王」などと呼ばれて、「俺はヤジが上手い。センスが良い」などと調子にのっている人物までいて、ひどいものである。心理的作戦と言えばそれまでだが、スポーツでもあるので常識をわきまえて欲しい・・・ごめんなさい、つい昔を思い出して私情が入ってしまった(^^;)まあ、ヤジは脇へ置いといて・・・・
結局野球は状況の多様性と変動性の高さのために課題達成が難しくなる競技である。
これらのことから言えるのは、人の運動はその生まれる状況とは切り離すことはできないと言うことである。どんな簡単な動きも、多くの選択肢や突然変化する状況に出会うと、滑らかさや素早さを失い停止してしまうこともある。
転倒という問題に出会うと、身体機能、つまり筋力や柔軟性、感覚、体力、バランスなどの身体能力の低下だけに原因を求める傾向がしばしば見られるが、まずは状況性という基本的な視点にも注意を配る必要があるのである。(その10に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【あるある!シリーズの電子書籍】
西尾 幸敏 著「脳卒中あるある!: CAMRの流儀」
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
スポーツから学ぶ運動システム(その8)
2. 単純な身体の使い方と複雑な身体の使い方
野球の打撃を見ていると他の競技に比べて身体の使い方はとても単純である。
たとえば打者はバットを構え、ボールがきたらそれを打つべく振るという身体の使い方だ。幼い子どもにオモチャのバットを持たせてボールを投げて、「打ってごらん」と言えば、スムースさや速度、力強さ、正確さには歴然の差はあるもののすぐにできる身体の使い方でもある。
一方で体操競技の床運動などを見ると両脚で跳ねたかと思うと、前方に2回転しながら2回身体をひねって着地するというとんでもなく複雑な身体の使い方をする。これは少々練習したからと言ってできる身体の使い方ではない。優秀なアスリートだって「やってごらん」と言われても到底できるものではない。
そうすると単純な身体の使い方をする野球の方が遙かに簡単な競技であるかというとこれまたそうとも言えない。プロ野球の世界、つまり子供の時からもの凄く練習してきた熟練したバッターでも3割を打つことは難しい。一方体操選手の方はちょっとした複雑な技でも、繰り返しの練習で熟練した技術を持ってすれば試合での成功率はもっと高いはずである。正確にはわからないが、3-4割程度の成功率の技で勝負するとは思えないからである。つまり身体の使い方が単純だからより簡単な競技であるとは言えないのである。
これをCAMRの「状況性」という視点から説明してみよう。状況性とは運動がどのような状況の中で生じるかというもので、いくつかの視点があるが、ここでは状況の多様性と変動性という視点で考えてみる。
たとえば体操の床運動では、競技者は重力下、床の上で運動を行う。場所は体育館内である。重力は狭い範囲では一定で変化はなく、床もどこをとってもほぼ均一で、一定の弾力と硬さを持っており床が上下左右に動くこともない。明るさや温度も大きく変化することはない。体操はこのように物理的には安定した環境で行われる。
体操では、跳馬にしても段違い平行棒にしても固定され安定した道具を試用する。そしてあまり変化しない物理的環境内で、それら器具と身体との関係を保ちながら身体を動かす競技なのである。つまり運動の起きる状況とは物理的には多様性も変動制もとても少ない状態で行われるわけだ。(吊り輪だけは他のものに比べて可動性が大きく不安定である。もっとも天井に伸び縮みのない紐で固定されて、全く不安定とも言えないだろう)
もちろん観客の存在やライバルの演技は、状況性に変化を与えるのは明らかだが、運動の起こる物理的状況性については野球とは比べものにならないくらい小さいのである。
そして体操競技を課題として説明してみると「安定した物理的環境内で、一定の順序と速度と身体の位置をコントロールして複雑ではあるが、正確で速くダイナミックな動きを生み出すという課題」である。体操選手はこれに従って、何度も決められた手順を繰り返し練習するわけだ。この安定した物理的環境内という状況が、身体の複雑な動きを生み出す基礎でもある(その9に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
スポーツから学ぶ運動システム(その7)
さて、今度はこれまでのことを僕達の臨床に当てはめて考えてみよう。
脳卒中片麻痺後の体は、麻痺が広範囲に起きて大きな変化が起きてしまう。まるで自分の体ではないように感じてしまう。麻痺した手を動かそうとしても動かない。患側下肢に支持性が出てきて立てるようになった後、歩く課題を出すと麻痺した脚を振り出すことはできない。
患者さんの希望は歩けるようになって家に帰りたい、だ。
そこであなたは平行棒を持って立っている患者さんに「何とか悪い方の脚を振り出して」という課題を出してみる。患者さんは、いろいろ体を動かしてみる。身体の中にある使えそうな運動リソースを探索し、試行錯誤して何とか麻痺脚を振り出すための体の使い方を見つけようとされる。
だが上手く行かない。あなたは徒手で患者さんの体幹や股関節の柔軟性を改善する。それから立位時で脚を振り出す練習の時に、麻痺側の靴先に靴下の先っぽを切った袋をかぶせてあげよう。これによって爪先の摩擦を軽くしてあげるのだ。セラピストが身体リソースを改善し、新たな環境リソースの使用を提案する訳だ。
また「健側へ重心移動して体幹を反らせる」という課題を出してみる。リソースや課題を工夫して何とか脚が振り出せるようにするのだ。これらによって患者さんは下肢が滑り出すことに気がつかれる。
こうやって「麻痺脚を振り出す」という課題がなんとかできるのでこのスキルは繰り返され、やがて洗練されていく。最初は体幹の伸展側屈による振出がメインだったが、繰り返すうちに、麻痺側下肢を振り出す時に、麻痺筋の弱い収縮でもタイミング良く使えることがわかってくる。次第に使える身体リソースが増えてきて、全体の運動スキルはより効率的になってくる。そして「分回し歩行」の協応構造ができてくるのである。訓練室の平行棒を使った「分回し歩行」はやがて安定してくる。
すると今度は「パイプ椅子の背もたれや杖を持って分回し歩行」という課題に移行する。杖のような不安定なものでも上手く分回し歩行ができるようになると、今度は杖で屋外歩行などを行う。アスファルト面では、これまでのように患側下肢を滑らすような振出ではつまずいて危険であることに気がつくので、より患脚を持ち上げて振り出されるようになる。最初は意識していても、そのうちになにも考えずに滑りにくい床面では自然に脚を高く振り上げられるようになる。急ぐときにはより遠くへ脚を振り出されるようになるし、濡れて滑りやすい床面では、振出を小さくしてよちよちと歩かれるようになる。
ボーンスペースを用いて回りの物理的構造、特に床面の状態、回りの人達、杖と床の固定力、また靴や服の感じ、麻痺肢の支持性や動く程度、置かれた状況など心身の状態などを把握しながら、環境や状況に相応しい「分回し歩行」の調整ができてくるのである。これが「課題達成時の知覚情報の予期的利用」のスキルとなる。
臨床で新しい運動課題を達成するためには、この二つの段階があることになる。「協応構造の探索、試行錯誤、洗練」と「知覚情報の予期的利用によって協応構造を調整する方法を学ぶこと」である。
協応構造は「繰り返し課題」で、知覚情報の予期的利用により協応構造の調整は、「課題を様々な状況で行う試行錯誤課題」によって達成される。臨床ではこの二つが必要なだけ行われるよう配慮する必要がある。(その8に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
スポーツから学ぶ運動システム(その6)
昔リハビリの養成校の教官をしていた時、三つ玉のジャグリングを運動学習の課題として使うために自分でも練習していた。最初は課題達成のために視覚情報が重要な役割を果たしているのは間違いない。見ないととてもできないからだ。しかし慣れてくると短い間なら見なくてもできるようになるのである。つまり視覚に頼らなくてもいつのまにか身体感覚だけでジャグリングができるようになる。
どんな運動でも全身を使うものだ。従ってどんな運動学習においても常に全身のボーンスペースを通して運動課題を達成するための知覚情報の利用方法を学習していることになる。つまりスキルが熟練するとは、多種類の知覚情報を基に課題達成のための運動スキルの実施が可能になるということだろう。つまり視覚情報でもできるが、視覚情報がなくても一時的には固有各情報などでもコントロールできるようになるということだ。
さて、これまでをまとめると、運動学習とは次のように理解することができる。
新しい運動、新しい課題達成方法を学習するためには、まずその課題達成方法がある程度安定してできるような協応構造を探索し、試行錯誤し、安定させる必要がある。これが第一段階。(協応構造探索の段階。ある程度安定した運動を生み出せる段階)
そしてその安定した協応構造を基に、課題達成時の知覚情報を利用して、課題達成を状況に応じて柔軟に変化させて課題達成の方法をその時、その場で生み出すための知覚情報の予期的利用に関するスキルを磨き上げて行くのである。これが第二段階。状況は常に変化するため、運動スキルの維持にも継続した練習が必要。
たとえばバスケットボールのフリースローを例にとって考えてみよう。あなたは初めてバスケットボールを持ち、ゴールに向かって投げることになる。経験者のフォームを真似て、右手でボールを下から持ち、左手で側面を支えて、頭の前でボールを構えてみる。そして投げてみる・・・ボールはまっすぐには飛ばないし、全然ゴールにも届かない。手脚の動きもぎこちなく、バラバラに動いている感じである。
経験者が「手だけでなく、膝を使って全身で伸び上がるように」と手本を見せてくれる。そこで真似をしてみると飛距離は伸びて、ゴール近くまで届くようになる・・・・しばらくすると手首を使うように言われてこれまた真似をして始めてみる・・・・最初は腕をメインに使って、体の動きや手首の動きもバラバラだったが、次第に下半身のバネと手首が連動して、一つの動きとして安定してくる。つまり協応構造が芽生えてくる。
こうしてこのフォームでボールを投げ続けると、次第に体が自然に動くようになりゴールにボールが当たることも増えてきた。一人一人の運動システムの物理的性質は異なっているので、人とは違ったあなたらしいフォームができてくる。これが協応構造のできあがってくる過程だ。
しかしボールはなかなかゴールに入らない。ボールがただゴールに届くだけではダメなのだ。あなたは全神経を集中してゴールに向かうようになる。それまでは自分の体の動かし方が気になっていたのだが、やがて体にはそれほど注意が向かなくなる。これまでの運動学習理論では「自動化の過程」と言われたものだ。 体の動きが気にならなくなると、自然と注意はゴールとゴールに向かうボールに向くようになる。上手くゴールできたときの体の感覚にも気がつくようになる。ひたすらこれを繰り返す。
フリースロー練習だけでは物足りなくなってくるので、コート上の様々な角度、距離からもシュート練習を行う。最初は上手く行かないが、やがて距離や角度が異なってもそれなりにゴールに近いところにボールをコントロールできるようになる。これをひたすら繰り返す。
こうして1球目には失敗しても、2球目、3球目にはゴールする確率が高くなってくる。結果を見て修正することができるようになったのである。これが「課題時の知覚情報の予期的利用」のスキルである・・・・ さて、これらの中で経験者のアドバイスと呼ばれるものが、CAMRではセラピストが現場で使う「運動課題」となる。CAMRではセラピストは課題の提案が、一つの重要な役割である。課題は言語、身体模倣、徒手を含む介助、環境設定を通して伝えられる。
そして一人一人の運動システムの物理的性質は異なっているため、セラピストは対象者の物理的性質を探索し、試行錯誤しその個人に合った運動課題を修正する必要がある。
以前は運動学習では「一つの正しい運動を繰り返す」ということも言われていたが、実際には「繰り返し」と「試行錯誤」がその本質である。(その7に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
スポーツから学ぶ運動システム(その5)
ベルンシュタインがもう一つ提案しているのは、「課題達成時の知覚情報の予期的利用」である。ここでは射撃あるいはアーチェリーを例に説明してみよう。 選手は環境の状態を全身で感じながら、的に向かって銃をズドンと撃つ、あるいは弓で矢をビシュッと放つ。弾や矢は空中を、重力や温度、湿度、風などの影響を受けながら的に向かい当たったり外れたりする。
選手はその結果を全身の知覚によって知り、修正を加えるわけだ。たとえばその時、その場の環境の状態を全身の知覚を用いて感じる。着弾点が思ったより低かったり、右にずれたりすると環境の中から拾い出した「湿気が高いな。今は空気抵抗が思ったより大きい」とか「今の右向きの風の影響でこの程度のズレが出た」などと考え、修正を予期的に行い、次を放つ。そしてまたその結果をフィードバックしては、次に予期的修正を加える。・・・これが「課題達成時の知覚情報の予期的利用」と言うことである。
たとえば前に出た職人の腕の動きは一回一回微妙にずれるけれど、釘とハンマーの接触を視覚や全身の筋感覚によって毎回予期的に修正しながら課題達成しているから、異なった運動で同じ結果を生み出すことができるとしているわけだ。初心者の間は、失敗が多いが、その結果はフィードバックされ、全身の知覚情報と照らし合わせて予期的な修正の仕方を学んでいくのである。結果が上手く行けば「その調子で」繰り返すことになる。
つまり協応構造で運動を毎回作りだし、ある程度安定して似た運動を繰り返せるようになる。繰り返し練習はこのために必要である。しかしその中でも微妙にずれてしまう毎回の運動の軌道をその課題達成時の知覚情報を予期的に用いることで毎回課題達成をやり遂げているのである。そしてこのためにも莫大な時間が必要となるわけだ。間違いをどのように修正するか、回りの環境や状況の影響を受けながら、予期的に修正するためには莫大で異なった状況を繰り返す経験が必要である。
生態心理学のギブソンは、骨格とそれをつなぐ軟部組織や筋群、視覚、聴覚、嗅覚、味覚などが一体になって構成される人の身体をボーンスペースと呼んでいる。彼の言う触覚系(筋の固有覚を含む)は、全身常に一体となって対象物を動きながら知覚し、同時に自分の体の状態も知覚しているとしている。
つまり学校で習ったように知覚とはそれぞれ視覚、聴覚、嗅覚などと独立したモデュールとして働いているのではなく、全ての知覚は同時に働いて課題達成に関わっているとしている。
ジャグラーは初期には視覚を中心にコントロールを学ぶが、熟練してくると閉眼しても失敗なくできるようになる。視覚情報だけでなく、全身の緊張状態や体の安定、腕の動き、皮膚の感覚などの知覚情報を総動員してジャグリングができるようになるからだ。バスケやサッカーのノールックパスなどもそれと似た例だろう。
知覚学習とは、単独の感覚モデュールではなく、ボーンスペースによって全身的・全ての感覚間で行われるのである。(その6に続く)
#運動システム#ベルンシュタイン#協応構造#知覚情報の予期的利用
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
スポーツから学ぶ運動システム(その4)
従来、運動学習は人の運動システムを機械にたとえて説明されてきた。機械のように頭の中にプログラムがあり、同じ動きを繰り返し生み出していると考えられてきた。運動学習は、頭の中にプログラムを作るために同じ運動を繰り返すのである。その結果、一つのプログラムによって同じ運動が生まれ、同じ結果が生み出されると考えられた。
しかしこれは間違っているのではないか。人の運動システムは機械とはまったく異なる作動原理で動いているのではないか。まあこれがベルンシュタインの出した結論である。人の運動システムは機械とは丸っきり異なった性質を持っているし、頭の中にあるプログラムで同じ運動を生み出しているわけでもないだろう。(実際スキーマ説のように修正されたプログラム説も後に出てきた。このスキーマ説に影響を与えたのもベルンシュタインと言われている)
ではどのようにして人の運動システムは毎回異なった動きで同じ結果を生み出しているのだろうか?この説明のためにベルンシュタインは2つのアイデアを提案している。
1つは協応構造だ。筋・骨格的なレベルあるいは神経的ないくつかのレベルで、動きを制限するような協応的な構造が作られるのだ。構造的に動きはグループとして限定されるので一つ一つの細かな筋をコントロールする必要がなくなる。
たとえばスポーツでみると、初心者は体幹や四肢の動きがバラバラで協調性が見られないのに対して、上級者はその人らしい体の構え、フォームを持っている。プロ野球の打者やプロバスケットポールの選手は、自分らしく安定したフォームができるまで数え切れないほどの練習を繰り返す。
ピッチャーの投げたボールは様々な速度、コース、球種で打席に届くが、そのボールがある範囲内におさまっていれば打者はその人らしいフォームでバットスィングをするものだ。それは繰り返しの結果のフィードバックによって課題を達成するために便利なベースとして作られた協応構造があるからだ。
繰り返しの練習は、頭の中に固定的なプログラムを作るためではなく、より良い結果を生み出すための構え、ベースとしての協応構造を生み出すための過程である。職人やアスリートの一人一人はたくさんの試行錯誤の中から、自分に合った課題達成のための協応構造を発見し、作り上げるために繰り返し練習を必要とするのだ。
そして一旦できてしまった協応構造も、しばらくその課題をしなかったり、身体的・状況的な変化(体型や筋力変化、環境変化など)が生まれると良い結果は生まれにくくなる。だからイチローのように一流選手になってからも、その時、その状況に相応しいように協応構造を修正するために基礎となる素振り練習をやめないのである。やめるとその協応構造を基にした課題達成方法と実際の状況変化の間にズレが生じて良い結果を生み出せなくなるからだ。
そして実際の状況変化に応じるために必要なのが、ベルンシュタインが提案したもう一つのアイデア、「課題達成時の知覚情報の予期的利用」のスキルである。(その5に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
スポーツから学ぶ運動システム(その3)
前回は人の運動システムが同じ運動を繰り返せない理由の1つとして人の運動システムの粘弾性の性質を挙げた。
ベルンシュタインは他に自由度と多義性の問題を挙げている。
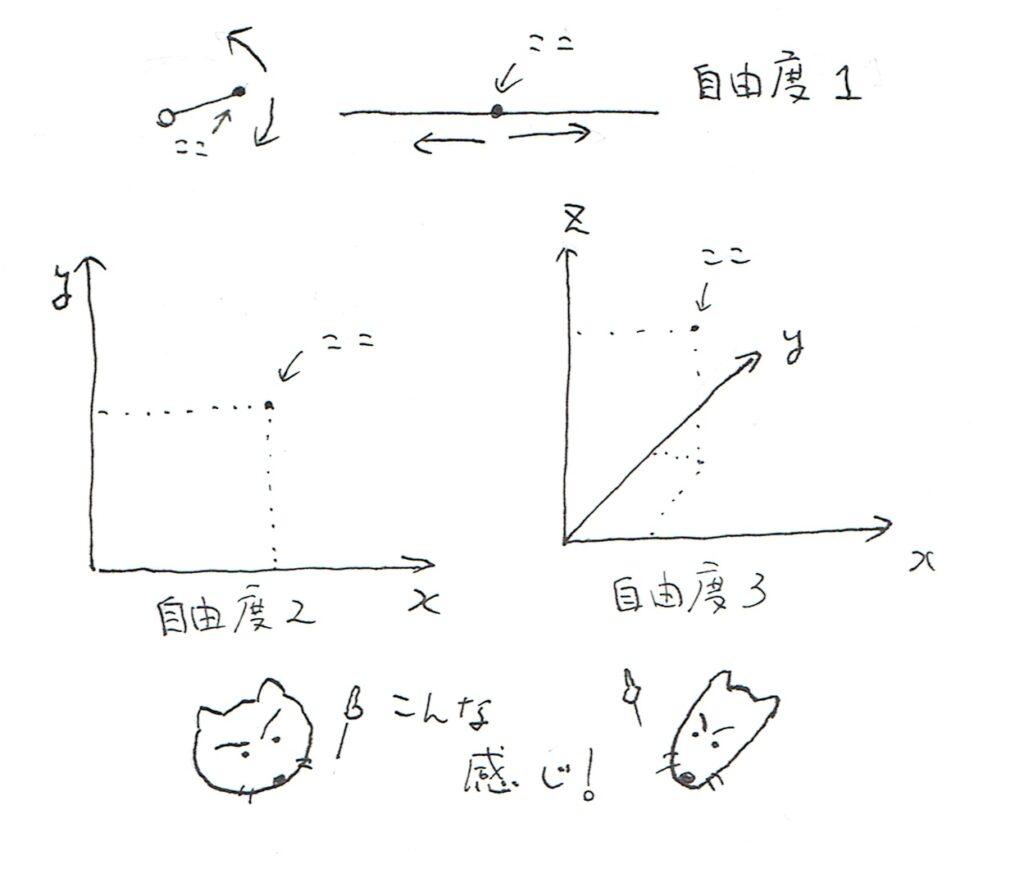
自由度はコントロールするべき対象の数と考えることができる。たとえば自由度1は線上を行ったり来たり、あるいは軸周りを回転する運動で、どの位置に止めるかは線上あるいは軸周りの一点を指定すれば良い。つまり一つの変数を決定すれば良い。人の関節でたとえるなら蝶番関節である。
自由度2は平面上の一点の運動で、位置を決定するにはxとyの二つの変数を決定すれば良い。人の関節で言うなら平面関節。
自由度3はそれに高さが加わり空間内の一点の運動となるので三つの変数を決定する。人の関節で言うなら球関節である。
機械は基本どの可動部分も軸周りか線上を行ったり来たりする運動である。つまり自由度1の運動に制限されている。それらの組み合わせであるから、硬い基礎の上に設置された一つの可動部分が他の可動部分とお互いに動きを制限する。全体としてどんなに複雑そうな動きをする機械でも、どの部品もその組み合わせである一ユニットの動き方はいつも一つである。
一方人では自由度2や3の関節の組み合わせである。右手人差し指で壁のスイッチを繰り返し押すとき、人差し指の位置は毎回決まっていても、肩の位置や肘、前腕の位置の組み合わせは無限に存在し、一つに決定されるわけではない。運動の軌跡や速度は無限に存在しうるし、結果はその時の状況による。つまり様々な運動方法で同じ結果を生み出しうる。
多義性は、人の運動は状況によって、同じ筋収縮が別の運動を生みうるし、異なった筋収縮が同じ運動を生みうると言うことだ。たとえば上腕三頭筋が姿勢や状況によって異なった働きをすることを考えてみれば良い。
またベルンシュタインは言っていないが、神経構造も1つの細胞がたくさんの細胞に繋がり、1つの細胞はたくさんの神経細胞を受けている。つまり1つの電気命令が多様な反応を生みうるし、たくさんの命令が1つの同じ運動を起こしうる構造なのだ。つまり神経構造で見ても1つの命令が1つの運動に対応していない。 これらをまとめると、状況によっても神経の構造によっても、1つの命令が異なった運動を生み出しうるし、一瞬一瞬に変化する状況の中では、1つの同じ命令が次から次へと異なった運動を生み出すということになる。
まあ、回りくどくなってしまったが(^^;)、結論としては、人の運動システムは機械と違ったやり方で作動しているし、同じ運動を繰り返せないのだ。
実際、職人のハンマーを打つ動作は、一回毎に肩や肘の動きや速度の関係が異なっているにも関わらず同じ結果を生み出しているのだが、これをどうやって実現しているのか?これが次回からの話なのだ!(その4に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
スポーツから学ぶ運動システム(その2)
前回はゴルフとテニスなどを例に、人の運動システムは「同じ運動を正確に繰り返すことができない」という特徴があると説明した。今回はどうして同じ運動を繰り返せないのかを考えてみよう。
ベルンシュタインはまずその理由の一つを、「人の体が粘性や弾性の性質を持っているからだ」としている。たとえるならゴムのような性質を持っているわけだ。僕なりにこれを機械と比較しながら説明してみよう。
機械はがっしりと安定した金属などでできた躯体が基礎となる。自動車なら非常に頑丈なシャーシが土台となる。車のシャーシは通常走行なら、つまり事故でも起こさない限りほとんど歪んだりはしない。つまりこの頑丈な躯体を全体の基礎として可動部分だけが安定して正確に動くという構造である。
一方人の体にはそのような頑丈で全体の安定的な構造を形作るような基礎は存在しない。まず人の体はたくさんの骨が柔軟性のない靱帯によって結びつけられた骨格がある。骨同士はある部分はタイトに、ある部分は大きな可動性を持って結びつけられている。 これを筋肉という柔軟性のある器官で包み込んでいくわけだ。筋肉は張力、つまり引く力しか生み出さないので、引く力だけで骨格の形を保ち、支持と安定性、そして運動を生み出す仕組みである。
そして状況や運動課題によって、作動する筋群はどんどん変化し、支持する部分と可動する部位もまたどんどん役割を交代し、変化していく。同じ部位が状況によって支持したり、可動したりするわけだ。機械と違って作動ははるかに複雑なのだ。
また柔軟な筋肉で形を成す構造であるから、力の発生によっても外力によっても、その形は全体に常に歪んでしまう。歪んでしまうと言うと聞こえが悪いが、しなやかに柔軟に形を変えながら動いているのである。機械では歪むのは可動部分だけで、基礎となる躯体はまったく変化しないわけだが、人では全身が常に柔軟に変形しているわけだ。
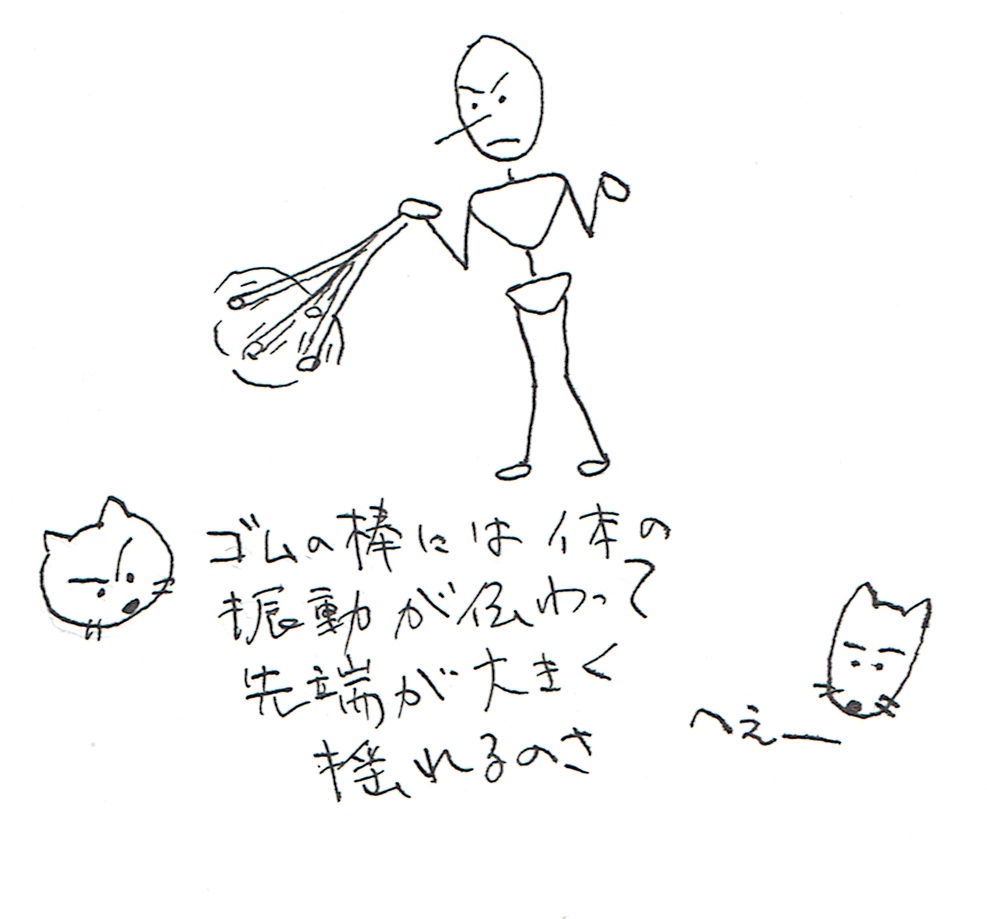
まあ、人の運動システムは機械と違って柔軟であるというのがまず第1のポイントである。たとえば長さ1メートルの柔らかいゴムの棒で、壁の電灯のスイッチから離れてを押すところを想像してみると容易に理解できるだろう。ゴムの棒では持っているだけで先端が常にユラユラ揺れて押そうとしても毎回開始位置は違うし、異なった運動軌道を描いてしまう。
実際には人の柔らかい体は呼吸などによって常に揺れて振動しており、その目に見えない小さな振動はゴムの棒に伝わると、1メートル先では大きな揺れになってしまうのである。
まあ、柔らかい構造は同一の運動を正確に繰り返すことはできないのである。(その3に続く)
【CAMRの基本テキスト】
西尾 幸敏 著「PT・OTが現場ですぐに使える リハビリのコミュ力」金原出版
【運動システムにダイブ!シリーズの電子書籍】
西尾 幸敏 他著「脳卒中片麻痺の運動システムにダイブせよ!: CAMR誕生の秘密」運動システムにダイブ!シリーズ①
【CAMR入門シリーズの電子書籍】
西尾 幸敏 著「システム論の話をしましょう!」CAMR入門シリーズ①
西尾 幸敏 著「治療方略について考える」CAMR入門シリーズ②
西尾 幸敏 著「正しさ幻想をぶっ飛ばせ!:運動と状況性」CAMR入門シリーズ③
西尾 幸敏 著「正しい歩き方?:俺のウォーキング」CAMR入門シリーズ④
西尾 幸敏 著「リハビリの限界?:セラピストは何をする人?」CAMR入門シリーズ⑤
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!













