≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「リハビリは、1回20分の訓練で何ができるのか?(その1)」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
リハビリは、1回20分の訓練で何ができるのか?「その1」
僕がPTとして介護保険施設で働き始めて5年が経ちました。働き始めた当初、クライエントのADL問題に関して介護スタッフから色々な質問や相談が寄せられました。どうも当施設の介護スタッフには「ADL問題の解決はリハビリの専門家の助言が絶対必要」といったイメージがあったようです。
当然僕がそれぞれのADL問題の解決に適切に応えられる訳がありません。たとえば機能改善が余り起きない重度の方の排泄では、オムツの選択やあて方の工夫などが必ず必要になります。介護スタッフの方が元々知識もあり、生活のほとんどの場面で世話をして状態に精通し、問題解決の様々な方略を生み出しやすい立場にあります。どう考えてもADL問題の解決は、介護スタッフが専門にするべきなのです。(結果、当施設の介護スタッフは現在「ADL問題解決の専門家」として非常に頼りになる存在になっていますv(^^))
となると実際1回20分、週数回の訓練しか行わないリハビリスタッフに何ができるでしょうか?
僕がCAMRの普及が必要と考えている一つの理由はここにあります。1回20分をどう有効に使えるか、使うべきか?CAMRが人の運動システムの作動の性質を明らかにして、進むべき道を示してくれます。以下のようなことです。
1.人は生まれながらの運動問題解決者。セラピストがクライエントに正しい運動方法を教え、管理する必要はありません。
2.人が今よりも問題解決者として能力を発揮するために必要なのは何か?それはより十分な「運動余力」です。運動余力とは豊富な「運動リソース」を基に発展させた多様な「運動スキル」であり、それらの運動スキルを上手く組み合わせて問題を解決する「運動方略」です。そして「運動余力」の改善なら1回20分のリハビリでできるのです。いえ、リハビリこそが最も有効になしえるのです。(「その2」へ続く)
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!



≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「CAMRの簡単紹介(その3)」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
その3 運動の形に焦点を当てない
従来型のアプローチが基礎としている運動科学は、形の科学ということが言える。佐々木正人さんは運動科学が映画技術の発達と共に進んだことを述べている。運動は映画フィルムの一コマ一コマに記録され、姿勢の変化として理解される。
実際運動を姿勢の変化として捉えると、運動の形を角度や速度で表しやすいし便利である。そして健常者の運動の形が基準になりこれが色々と数値化されたりする。
この形を見ていく運動科学の影響は現在でも強く、従来型アプローチでは運動を形で判断するということがよく行われる。健常者の運動の形からのズレが、障害の結果であると考えられる。逆に健常者の運動の形に近付くことが、障害が改善されていることの目安と考えられがちだ。形はとても大事に考えられているわけだ。
この枠組みでは、健常者の歩行の形を真似て、近づけていくことが当たり前のアプローチの方針になる。
一方CAMRでは、運動の形には焦点を当てない。歩行なら形ではなく、立位で環境内を移動するという機能に焦点を当てる。どんな形であれ、歩行という機能を生み出しているかどうかに焦点を当てる。この視点から見ると「状況に応じて歩行の形を変えてでも歩行という機能を維持しようとする」という人の運動システムの特徴が明らかになってくる。
この枠組みでは、運動の形を真似るのではなく、形は変化させてでも良いから、機能を維持することがアプローチの方針となる。
少し脇道に逸れるが、ドイツの友人から次のようなシステム論的アプローチの批判を聞いた。「システム論のアプローチでは、できさえすれば形はどうでも良いといったことが言われるが、それで良いのか?あなたが片麻痺になったときに、歩ければどんな形でも構わないのか?健常者の形で歩きたいと思わないのか?」まあ、難しい質問ではあるが、僕ならこんなふうに問い返したい。「もし健常者のように歩けないなら、もう歩きたくないのか?歩かなくて良いのか?」
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「CAMRの簡単紹介(その2)」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
その2 障害に焦点を当てない2013/9/21
従来型アプローチは、運動機能低下の原因を求めて障害に注意を向けていきます。脳性運動障害では思うように身体が動かず、過緊張や低緊張の状態が見られます。この原因は「脳細胞の傷害にあり」などと言って、「脳細胞の働き」にアプローチしようとします。
こうして日本では1970年代に「脳性麻痺は治る」という熱狂に包まれます。でも現時点でも、脳の機能的代償や構造的再生について明確に効果を示しているものはありません。今本的原因にアプローチすれば、根本的な解決になると思われがちですが、40年以上、解決の見えないアプローチになってしまっているのです。
また「その1」でも述べましたが、たとえば特定の筋力低下のある筋を探し出して、その筋を鍛えれば良い、と言うのは「障害に焦点」を当てているためにどう鍛えるかについては無関心になってしまいます。
CAMRでは、「障害に焦点を当てる」代わりに、最初から人の運動システムの「作動に焦点を当てて」います。例えどのような障害がどの程度あるにしろ、人の運動システムとしてどう作動し、どのような機能と結果を生み出すのかを見ていきます。
そうすると、その作動を理解する上でどうしても知っておくべきことがあります。それが「システムをどう捉えるか?」と言うことです。しばしばシステム論理解の邪魔になっているのは、このシステムが何か?ということです。
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「CAMRの簡単紹介(その1)」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
西尾です。CAMRの簡単紹介
その1 運動機能低下の原因を探らない2013/9/14
従来型のリハビリテーションアプローチでは、まず障害(失われたあるいは低下した運動機能)に焦点を当てて、障害の原因を探っていきます。簡単に言うと「できないこと」に焦点を当てて、その「原因」を見つけ、その原因にアプローチしようとします。
たとえば「最近歩きが不安定で転けやすい」の原因は「特に下肢の筋力低下」としたとします。そうすると下肢の筋力強化を行うわけです。この流れの中では、下肢の筋力を強化すれば良いので、下肢の筋力の強化の方法は特に規定されません。座ってゴムバンドを使ったり、重りを使ったり、マシントレーニングを用いたりします。
一方、CAMRではこのようなアプローチを取りません。まず健常者の運動システムの特徴を基に、ひたすら運動余力を豊富にすれば良い、と考えています。従って機能低下の原因を探るような評価はしません。現在の運動機能を評価し、その残った機能が改善していくようにアプローチします。
アプローチの方法も健常者の運動システムの特徴から、「運動余力は必要とされる運動課題を中心に改善する」と考えます。これまた簡単に言うと「最近歩きが不安定で転けやすい」クライエントが来られると、立位での挑戦的ではあるが達成可能な運動課題を繰り返し、あるいは少しずつ変化させながらやっていただきます。
人の運動システムの特徴から言って、歩行に必要な運動能力・余力は立位を中心とした様々な運動課題で作られるのであって、座位では作られないと考えています。
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
≧(´▽`)≦
みなさん、ハローです!
「CAMR Facebookページ回顧録」のコーナーです。
今回は「オートポイエーシスを読む!(その2)」です。
★☆★☆★☆★☆★☆★☆以下引用★☆★☆★☆★☆★☆★☆
オートポイエーシスを読む!(その2)2013/2/16
さあ、オートポイエーシスの世界の散策に出かけましょう!
ところで、オートポイエーシスって何なのでしょう?
直訳すると「自己創出」となるようですが…。
マトゥラーナらは、生物を定義する組織とはどのようなものか?ということについて考えていました。通常よくあるやり方だと、生物の特性をリストアップするという方法があります。例えば生物とは、「息をする」「子孫を残す」…等々。しかし、このようなリストで必要条件と十分条件の両方を満たすのは案外難しいようです。
例えば「息をする」についてなら自動車のエンジンでもシリンダー内のガス交換を行ないますし、「子孫を残す」についてなら、ロバと馬の雑種であるラバには生殖能力がありません。
それではマトゥラーナらはどうしたかと言うと、これらの特性を生み出す生物の特徴に目を向けました。具体例を一つ一つ挙げるのではなく、それらの具体例を生み出す元に着目しました。そして彼らが導き出した答えとは、
「生物は絶えず自己を産出し続けるということによって特徴づけられている」
ということでした。彼らはこのような、生物を定義する組織を「オートポイエーシス組織」と呼んだのです。
p.s.そういえばCAMRでも、人の運動システムの特徴を捉えて、そこからアプローチを組み立てていますね。
★☆★☆★☆★☆★☆★☆引用終わり★☆★☆★☆★☆★☆★☆
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
治療方略:治療の目標設定とその目標達成のための計画と方策
「敵を知り己を知れば百戦危うからず」
これは兵法で有名な孫子の言葉です。「危うからず」とは負けないこと。つまり勝つことも良いには良いが、まず負けないことが一番大事だと言っている訳です。そして負けないためには自分のことと敵のこと、どちらもよく知る必要があると言っているのです。
振り返って僕たちリハビリの仕事も、戦争に喩えるなら勝つことの難しい戦いです。というのもリハビリでは多くの場合、運動障害という治すことができないものを相手にしているからです。
たとえば脳性運動障害後のマヒはリハビリでは治りません。日本では50年以上前から壊れた脳の神経細胞の再生や他の脳細胞で機能を代償させてマヒを改善しようとするリハビリ・アプローチがあります。しかし未だにマヒが治ったという報告はありません。「マヒを治す」という目標は立派でも、それをリハビリで実現する方法は未だに見つけられない、あるいはリハビリではそんな方法はないかのどちらかです。50年というのはそれを納得するには十分長すぎる年月ではないでしょうか?つまりセラピストが、見通しの立たない「マヒを治す」という目標に拘り続けることは、目の前の患者さんにとっても不利益ではないでしょうか?
だからこそ今、自分のこと、治療方略や治療技術のこと、そして患者さん自身とその障害のことについてよく知ることが大事です。マヒを治すことはできなくても、今より良い状態を目指すこと、そして良い状態をできるだけ長く維持することはできるのです。つまり勝つ(治す)ことはできなくても、負けない(良い状態にする・維持する)という状態を作り出すことがなによりも大切なのです。
孫子のこの言葉には続きがあり、自分の実力を知っていて相手の実力を知らなければ勝ったり負けたりし、両方の実力を知っていなければ負けるに決まっているということです。
そこで自分たちの持っている治療方略を一度見直して、その効果と限界を整理してみることは有用でしょう。そして運動システムの作動の性質と障害を持った運動システムの状態をよく知ることも有用です。こうして初めていつでも安定して、患者さんのより良い状態を目指すことができるのではないでしょうか?
このシリーズでは、僕たちセラピストの持っている治療方略の長所と短所、限界を明らかにして、障害を持った人とどのように協力していけば良いのかを探ってみたいと思います。そして新しいより良い状態を目指し、良い状態を維持するアプローチを提案できればと思っています。(「その2」に続く)
システム論の話をしましょう(その13)
「運動システムは常に人にとって必要な課題を達成しようとするし、課題達成に問題が起きるとなんとか問題解決を図る」と前回述べました。
しかし誤解してはいけないのは、問題解決を図るといっても、問題は必ず解決されるわけではないということです。問題解決とはいっても、障害後に多くのリソースが失われた後の応急的・場当たり的な対処なのです。健常の頃のように状況に応じて適切な対応を行うことは望むべくもありません。運動システムは問題解決を図っていても、むしろ状況を悪くしてしまうことも多いのです。
たとえば外骨格系方略の問題解決を図っている人を沢山見ると、中にはどんどん硬くなって却って動きにくくなったり、あるいは過緊張のために不快や痛みに苦しんだりする人もいます。問題解決のはずがむしろ状況を悪くしているわけです。これは「偽解決」と呼ばれる状態です。(「偽解決」は短期療法などで使われるアイデアで、問題解決と思って実施したことが、逆に更に悪い状況を招いてしまうことです)
なぜ偽解決になってしまうかというと、体を硬くし始めたときには実際弛緩と比べて動きやすくなります。そうすると運動システムは上手くいった方法を繰り返してしまいます。元々障害後に沢山のリソースが失われて残ったリソースを利用し、選択肢もごく少ないので、それを繰り返さざるを得ないのです。体を硬くする元々のやり方ではなく、調整も上手くいかず、ひたすらできる事を繰り返すのです。だから体は次第に硬くなり、動きにくくなって更にそれが次の硬さの呼び水になります。たとえば硬くなった体を動かすための過剰な努力が必要になります。また硬さが痛みを生み、その痛みや不快刺激が防御的に更に硬さを生み出すわけです。つまり身体を硬くする問題解決が悪循環を生み出し、暴走してしまうのです。
また運動システムの問題解決が生み出すもう一つの問題は、「貧弱な解決」と呼ばれる状態です。これは最初に選ばれた問題解決が繰り返されて、なんとか課題は達成しているものの、その間に潜在的に筋力が回復したりしていてもそれに気がつかなくなってしまった状態です。最初の問題解決の方法が繰り返されるので、新たに回復した筋力などを使ってみる機会が失われてしまうのです。この潜在的に回復したリソースは「隠れた運動余力」と呼ばれます。もしこの「隠れた運動余力」を上手く使っていけば、運動課題達成のパフォーマンスはもっと改善するのですが、結局使われることなく、運動のパフォーマンスも改善することなく、停滞の状態になるのです。存在を気づかれなければ、ないのと一緒だからです。これは偽解決ほど悪い状態には見えませんが、長期的には患者さんにとって大きな不利となります。
脳性運動障害の患者さんは、元々の障害による弛緩麻痺(筋力リソースの消失・低下)の障害像に加えて、運動システム自体の問題解決の欠点ないしは副作用によって悪化した状態が加わってより複雑になっていることになります。
リハビリでは厳密には麻痺は治せないかもしれませんが、運動システムの作動の性質によって生み出された問題(偽解決・貧弱な解決)は障害自体ではなく、障害後の運動システムの作動の問題なのでリハビリで改善できます。そうすると「リハビリを受けて(状態)が良くなった」と喜ばれたりします。現場でも気づかずにこのアプローチをしている人がいて、「脳性運動障害に対する訓練効果」として説明しているのをよく見ます。基の障害にアプローチしているのか、障害に対する運動システムの問題解決(偽解決・貧弱な解決)にアプローチしているのか区別ができていないのです。
自分のアプローチが障害に対するものか、運動システムの作動に対するものかがはっきりするだけでも、自分のやっていることの価値や意味がより分かって仕事が面白くなります。(CAMRの講習会では様々な問題解決や偽解決・貧弱な解決の例がビデオでわかりやすく見られます。興味のある方は参加をお薦めします)(その14に続く)
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
システム論の話をしましょう!(その9)
さて、こんどはアメリカの課題主導型アプローチの実際の問題について伝えておきたいことがあります。
1991年の2月の凍てついた朝、僕はアメリカのシカゴの整形外科クリニックを訪れました。当時この最新の「課題主導型アプローチ」の現場を見学させてもらえることになったからです。
僕が見たもの。まずセラピストは患者に課題を出して、その内容を詳しく説明し、話し合います。そして患者を訓練室に残し、自分はさっさと机に引き上げ、コーヒーを飲みながら患者の様子を見ているのです。
セラピストが僕に向かって説明します。「患者に必要なのは適切な課題だ。課題達成経験を繰り返し、更に次のより困難な課題に挑んでを繰り返すことで課題達成能力や適応力が改善していく」みたいな。(英語の苦手な方なら分かると思いますが、その場の状況と聞き取れる単語から想像するしかないのです(^^;それにこのアイデア自体は本で勉強していたので)
「なぜセラピストは彼のそばを離れる?」と聞くと「彼は実生活では1人で課題達成の方法を見つけなければならない。セラピストがそばにいてセラピストの助けを借りる状況は彼の助けにならない。彼は試行錯誤を通じて1人で課題を達成する方法を身に付けた方が良いし、実際に身に付けることができる」と答えたように思います。(英語力の不足もあり、あまり正確ではありません(^^;)
「従来の徒手による可動域訓練は?」と尋ねると「課題を通して必要な身体の構成要素は改善されていく。あの方は足関節が硬いが、両手で支えながら不安定板に乗ることで痛みなく必要な可動域も筋力も改善されていく」といった説明でした。(英語力の不足もあり、以下同文(^^;)
僕はきつねにつままれたように感じました。こんなのが最新の訓練なのか?
僕は悶々としました。別にセラビストがいても問題ないじゃないかと思ったのです。自己組織化されるものなら、セラピストがいればそれなりの、いなければ自然に別のやり方が組織化されるだけ。正常歩行を勧めるセラピストのそばではできるだけ分回しを押さえようとするけれど、1人の時は盛大にぶん回し歩行をする患者さんなどがその良い例です。状況に応じて変化する訳だから。(でも英語しゃべれないから伝えられない(^^;)
あるいは親に手伝ってもらって泳ぐようになったり、自転車に乗ったりするのと同じことではないか?親に手伝ってもらったから、次から親がいないと泳げないという理屈と同じではないか。運動システムは一度泳ぐようになると、泳げなかった頃には戻れないのです。セラピストはそういうことには関係ないのでは?
それに課題を出すだけならセラビストのリソースとしての価値はあまりないのではないか、などとも感じました。セラピストならではというか、一人の人間としてももっと意味や価値があるはず・・・・でも英語しゃべれないから以下同文)
もしかしたらこれは課題主導型アプローチそのものというよりもそのセラピスト個人の問題かもと思っています。ただこれが初めての課題主導型アプローチとの出会いだったので、印象が良くなかった・・・・という、単に世間話になってしまいました(^^;)誰か実際のところを教えてくださると助かります。漠とした話で申し訳ない。次回は課題主導型アプローチの問題についてもっと根拠のある話をしますぜ(^^;(その10に続く)
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
システム論の話をしましょう(その8)
今回は「課題達成をリソースとスキルで説明する」というアイデアの有効性についてもう少し検討してみます。
従来学校で習う視点では、起立ができないと四頭筋などの筋力検査を行い、弱っている筋の筋力を改善するというアプローチを学んできました。つまりシステムの作動ではなく、構造を中心に考えます。特に四頭筋が弱っていれば、座位でおもりやゴムベルト、徒手などで四頭筋力を増やすという方法もよく行われてきました。
しかしこれではリソースの改善だけを考えたアプローチになってしまいます。座位で四頭筋だけ鍛えれば起立できるかと言えばそうでもないからです。たとえば「椅子に座って、おもりを足首につけて膝を伸ばす」課題は、四頭筋筋力を改善するためによく用いられる方法ですが、これをスキルの視点から見ると「骨盤と大腿を座面で固定され、下腿を持ち上げる」というひどく単純なスキルを練習していることになります。
でも実際に起立では、四頭筋は「座位での広い基底面から、脚だけの狭い基底面に大きく前方・上方へ重心を移動しながら、なおかつその狭い基底面内に重心を保持して身体全体を上方に持ち上げることを他の全身の筋群と協調しながら行うスキル」の中で働いているのです。
座位でのおもりをつけての四頭筋訓練はほぼ筋繊維を太くしているだけで起立に必要なスキル学習はまるっきり行っていないのです。起立に必要なスキルは全身的なものです。起立が危うい人は全身的に試行錯誤を通して必要なスキルを学ばなければなりません。つまり起立できるようになるためには実際に起立練習をして、起立のためのスキルを学習する必要があるのです。
座位で筋トレをすれば、また改めて起立練習で起立のためのスキルの練習をし直す必要があります。もちろん起立練習が到底無理なら、座位でまず筋繊維を太らすことには価値があると思います。しかし、少し手伝ったり、椅子の座面を高くしたり、前方の手すりを用意したりと利用可能なリソースを増やしてあげることによって、起立の課題達成がなんとか可能なら、最初からそのような形での起立の繰り返し練習をした方が効率的だし患者さんの達成感や満足感も上がるでしょう。
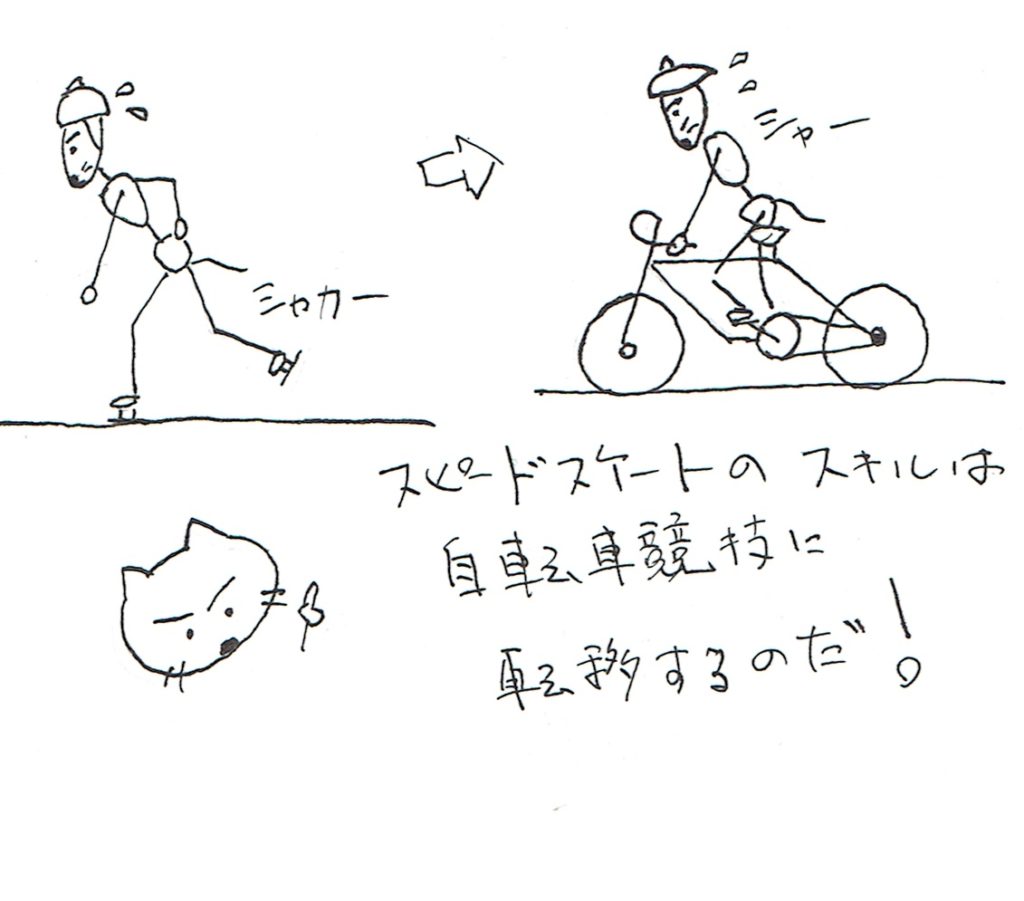
またリソースとスキルという視点で見るとこれまで理解できなかったいろいろな運動の現象が理解できるようになります。たとえば運動学習の効果の転移です。有名なところではテニスのスキルはラケットで球を打つ同じような運動の形に近い卓球には転移しないのに、形はまったく似ていないスピードスケートと自転車競技の間では明らかに運動学習効果の転移が見られます。(日本でも冬のオリンピアであるスピードスケートの橋本聖子さんが夏のオリンピックの自転車競技の代表になって話題になりました)
実は運動の形は似ていなくてもスピードスケートと自転車競技は、スキルの視点からはとても似通っていることがわかります。どちらも「狭い基底面を持つ道具の上で、バランスを保ちながら左右交互に重心移動をし、体重移動した片脚を力強く下方に踏みしめる」というスキルが共通しているのです。リソースや運動の形はまるっきり異なっていても、似通ったスキルを使う課題同士なら運動学習の効果の転移が起こるというわけです。
だから歩行を改善するなら、「立位でバランスを保って交互に左右への重心移動をしながら、片脚で体重支持しては体重支持しない方の片脚を持ち上げるような運動課題をすれば、これで身に付けたスキルは歩行へ転移する」と考えることができます。
またどのリソースをどのように使うかを見ることで、より実際的な運動分析を行うことも可能です。(CAMRではこれを「Resource-Skill Analysisリソース-スキル分析。RSAと略す」と呼んでいます)たとえば前方の手すりと上肢で主に前方への重心移動に使っているのか、体の持ち上げに使っているのかを見ることで運動システムが何を苦手にしているかが分かります。片手で手すりを持ち、前方への重心移動に使っているなら、わざわざ手すりと片手というリソースを「前方への重心移動」のために使っています。つまり前方への重心移動が苦手なのです。この場合、「体幹の柔軟性リソース」を改善して「手すりと片手というリソース」と置き換える、つまり手すりがなくても起立ができるようにすることもできます。(その9へ続く)
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!
システム論の話をしましょう(その6)
さて、2番目の分類は「外部から作動を見るアプローチ」です。この代表的なものの一つが「課題主導型アプローチ(Task Oriented Approach 以下TOAと略す)です。このアプローチの基礎となっているのがテーレンらの動的システム論であり、ギブソンの生態心理学です。
テーレンらによる動的システム論は外部から観察される姿勢や運動の基になっている運動システムの作動を物理学の枠組みから理解しようとします。動的システム論には、自己組織化、アトラクター、コントロール・パラメータ、多重安定性など多くの魅力的なアイデアがあります。これらのアイデアは僕たちが臨床経験を通じて漠然と感じていた運動システムの性質やいくつかの特徴的な運動状態を明確な言葉で表して理解を助けてくれると感じています。
さて、前回システム論は作動に焦点を当てていると述べました。つまりテーレンらは研究を通して「運動がどのように生まれ、維持され、変化していくか?」といった運動システムの作動を明らかにしているわけです。
テーレンらは心理学者ですが、正常運動発達を研究しました。それまでは一般に脳の中に正常発達の設計図があり、これに沿って運動発達が起こると考えられていたのですが、テーレンらは数々の研究から運動発達(運動の変化と安定)はあらかじめ決められた設計図はなく、様々な要素の相互作用から自己組織的に起きていると示したわけです。
もう一つ、生態心理学はアフォーダンスで有名なJJギブソンによって始められ、エレノア・ギブソン(以下、EJギブソンと略す)やエドワード・リード、日本では佐々木正人といった魅力的な心理学者達がいます。テーレンもその著書でエレノア・ギブソンに大きな影響を受けたと書いています。
生態心理学も脳が感覚を入力し、脳の中に世界像を作り、そしてそれを基に出力つまり運動をコントロールするというそれまでの脳が中心の常識的な考えを否定します。そうではなくて、脳は単なる調整役だというのです。たとえ神経系のない生物でも環境と出会い、うまく関係を築いています。元々そのような能力は生物が本来持っているものです。もちろん神経系はより高度に世界と関係作りをするために役立っているわけですが、それでも進化上は神経系は後から生物に乗っかってきたものです。
それに知覚とは動くことと言います。動くことによって動物にとっての必要な情報が知覚できる訳です。・・・まあ、そんな感じです。
テーレンらもギブソンらも心理学者ですが、運動を通して運動変化や知覚、認知のことを研究します。デカルト以来の西欧社会の思い込みの一つである心身二元論(機械の体とそれに乗っかっている心の二つが存在している)の伝統を否定しているのです。あるいは人の体を機械に、脳をコンピュータのように喩えることが間違いだと。生物は機械とはまるっきり違った存在だというあたりが基本になります。
(これらのアイデアについてはここでこれ以上説明することは控えます。正直、僕は未だにわからないことが多いのです(^^;特にアフォーダンスは苦手(^^;詳しく知りたい方はイラストのお薦めの文献に当たってください)
さて、この両者を基にして生まれた課題主導型アプローチは、またまた僕流に間違いを恐れずに言ってしまえば、以下のようなアプローチです。「運動は適切な課題を繰り返すことによって徐々に課題達成に向けて調整される。つまり運動は課題によって生まれ、成熟する。従って患者にとって必要な課題と課題の実施環境条件を提供することがセラビストの仕事である。セラピストは課題と実施環境を調整し、工夫し、患者にとって相応しく進化させ、提案することで患者にとっての必要な運動適応能力を改善していくことができる」のです。 まあ、このような理論的な説明は往々にして僕たち臨床家には届きにくいものです。臨床家にとっては実際にやってみることでしか、有効かそうでないか実感できないものです。
実際、僕自身は臨床でやってみて「素朴なシステム論的アプローチ」の有効さに気づきました。そしてこんどはこの「セラピストが患者に『課題』と『実施条件』を通して訓練する」ことを意識して実施して経験してみることにしました。理論というアイデアの「問題解決の道具」としての有効性を自分自身で試してみたのです。そうすると臨床で自分や周りからの経験だけでは学べないような様々な視点に自然に気がつくようになったのです。(その7に続く)
p.s.ブログランキングに参加しています。クリックのご協力、ありがとうございます!













